机器学习之神经网络学习及其模型
1、神经元模型
历史上,科学家一直希望模拟人的大脑,造出可以思考的机器。人为什么能够思考?科学家发现,原因在于人体的神经网络。

神经网络最基本的成分是神经元模型
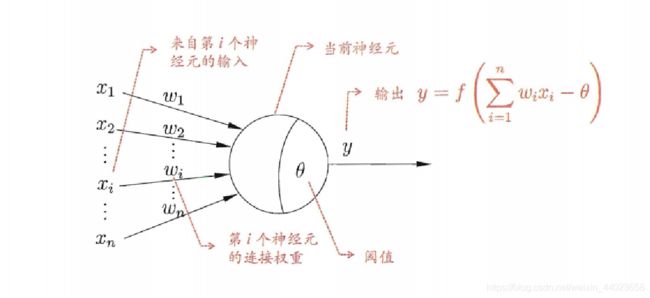 其中,W表示的是向量,代表的是权重,函数f称为激活函数,
其中,W表示的是向量,代表的是权重,函数f称为激活函数,
- 其中f()我们一般选择sigmoid函数(这里选择对数几率函数)
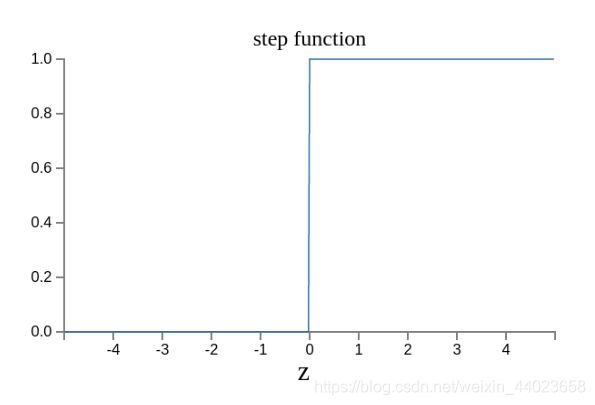
- 对数几率函数相较于阶跃函数优点:连续光滑,任意阶可导

2、感知机与多层网络
感知器的例子
城里正在举办一年一度的游戏动漫展览,小明拿不定主意,周末要不要去参观。
他决定考虑三个因素。
天气:周末是否晴天?
同伴:能否找到人一起去?
价格:门票是否可承受?
这就构成一个感知器。上面三个因素就是外部输入,最后的决定就是感知器的输出。如果三个因素都是 Yes(使用1表示),输出就是1(去参观);如果都是 No(使用0表示),输出就是0(不去参观)。

单层感知机:有两层神经元组成,只有一层M-P神经元的网络模
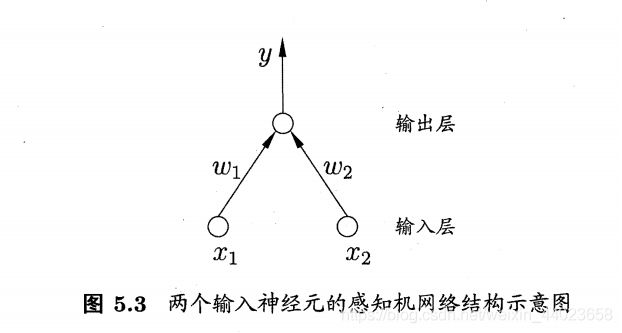 单层感知机学习参数的调整
单层感知机学习参数的调整
 单层感知机只能解决线性可分的问题,对于非线性可分问题,需要考虑使用
单层感知机只能解决线性可分的问题,对于非线性可分问题,需要考虑使用
多层功能神经元
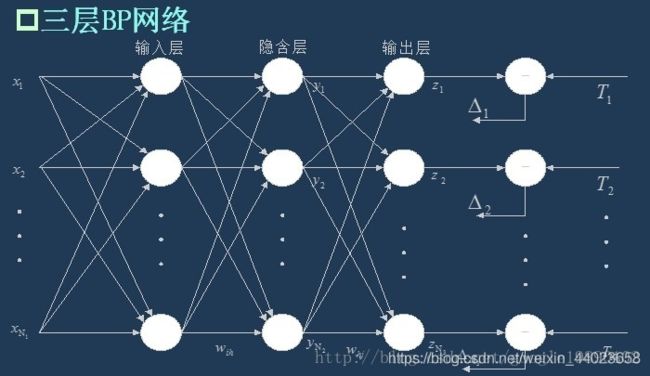
多层前馈神经网络:
- 多层:有隐含层
- 前馈:不存在信号的逆向传播,不存在环和回路
- 不存在同层连接,不存在跨层连接

3、误差逆传播算法
BP算法(误差逆传播算法)
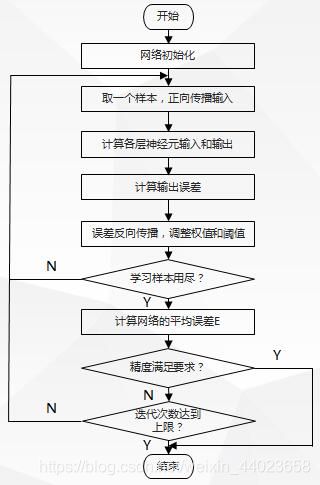
1.初始化
2.反复调整(信号向前传播->误差逆向传播->权值与阈值更新)
BP神经网络的过程主要分为两个阶段,第一阶段是信号的前向传播,从输入层经过隐含层,最后到达输出层;第二阶段是误差的反向传播,从输出层到隐含层,最后到输入层,依次调节隐含层到输出层的权重和偏置,输入层到隐含层的权重和偏置。
训练流程图
BP算法可能出现的问题
1.初始化问题:
初始化为不同的小随机数
不同:保证网络可以学习
小随机数:防止过大提前进入饱和状态
如果跌入局部最优,就要重新初始化
2.步长设置问题:
学习率(0到1之间)控制着算法的每一轮迭代中更新的步长
若太大,容易发生振荡,若太小,收敛速度缓慢。
3.结构学习问题:
- 输入层个数: 若给点属性为连续值,则等于训练数据的维度 若为离散值,等于维度+编码方式
- 输出层个数: 若为分类问题,与待分类类别数目大致成二为底的对数函数关系
- 隐层神经元个数: 试错法或者经验确定
一个包含足够多神经元的隐层,多层前馈神经网络就可以任意精度比较任意函数,所以,总可以找到一个合适的隐层神经元个数。
4.权值阈值更新问题:
-
标准BP算法:
每次更新只针对单个样例,参数更新非常频繁,不同样例的更新效果可能会有“抵消现象”,为了达到累计误差最小点,可能需要更多次的迭代。
-
累计BP算法:
直接针对累计误差最小化,读取整个数据集D之后才更新一次,更新频率低。但降到一定程度时,下降非常缓慢。
5.过拟合问题: -
过拟合:训练误差持续降低,但是测试误差却上升
解决策略
①早停
②正则化
4、全局最小和局部最小
由于初始化的时候随机初始化为不同的随机小数,则很有可能将网络跌入局部最优。不同的初始点,可能得到的最优解可能不同。
 跳出局部最优的策略:
跳出局部最优的策略:
- 以多组不同参数值初始化多个神经网络,从不同 的点开始搜索最优点,可能会得到的结果不同, 从中选择有可能获得更接近全局最小的结果。
- 模拟退火技术
模拟退火在每一步都以一定概率接受比当前解更差 的结果,从而有助于跳出局部最优。 - 使用随机梯度下降,即使跌入局部极小点,因为 加入了随机因素,可能跳出局部最优。
5、常见的其他神经网络
1.RBF网络
单隐层前馈神经网络
使用径向基函数作为隐层神经元激活函数,输出层是对隐层神经元输出的线性组合
2.ART网络
竞争学习型,由比较层,识别层,识别阈值和重置模块组成
有较好的“可塑性,稳定性”
可进行增量学习,在线学习
3.SOM网络
竞争学习型的无监督神经网络,将高维输入数据映射到低维空间
4.级联相关网络
不仅学习连接权,阈值,还要学习网络结构。希望在训练过程中找到最符合数据特点的网网络结构。
5.Elman网络
允许网络中出现环状结构,从而可以让一些神经元的输出反馈回来作为输入信号。
6、神经网络的例子
 所谓"车牌自动识别",就是高速公路的探头拍下车牌照片,计算机识别出照片里的数字。
所谓"车牌自动识别",就是高速公路的探头拍下车牌照片,计算机识别出照片里的数字。
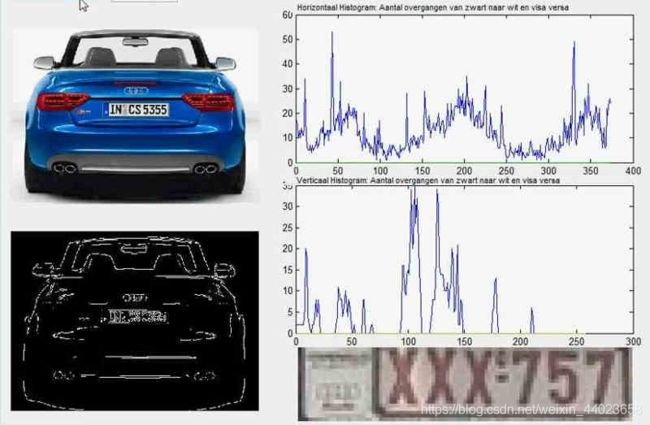 这个例子里面,车牌照片就是输入,车牌号码就是输出,照片的清晰度可以设置权重(w)。然后,找到一种或多种图像比对算法,作为感知器。算法的得到结果是一个概率,比如75%的概率可以确定是数字1。这就需要设置一个阈值(b)(比如85%的可信度),低于这个门槛结果就无效。
这个例子里面,车牌照片就是输入,车牌号码就是输出,照片的清晰度可以设置权重(w)。然后,找到一种或多种图像比对算法,作为感知器。算法的得到结果是一个概率,比如75%的概率可以确定是数字1。这就需要设置一个阈值(b)(比如85%的可信度),低于这个门槛结果就无效。
一组已经识别好的车牌照片,作为训练集数据,输入模型。不断调整各种参数,直至找到正确率最高的参数组合。以后拿到新照片,就可以直接给出结果了。

7、输出的连续性
上面的模型有一个问题没有解决,按照假设,输出只有两种结果:0和1。但是,模型要求w或b的微小变化,会引发输出的变化。如果只输出0和1,未免也太不敏感了,无法保证训练的正确性,因此必须将"输出"改造成一个连续性函数。
这就需要进行一点简单的数学改造。
首先,将感知器的计算结果wx + b记为z。
z = wx + b
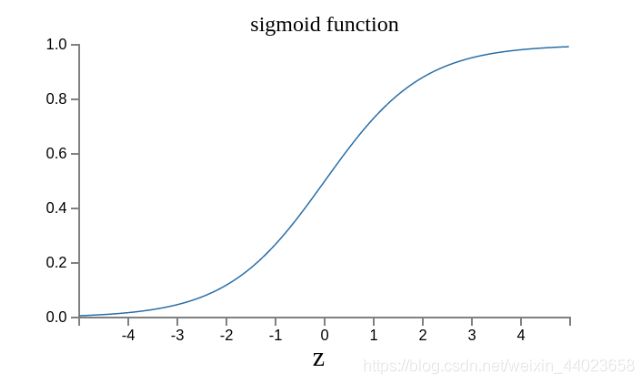
然后,计算下面的式子,将结果记为σ(z)。
σ(z) = 1 / (1 + e^(-z))
这是因为如果z趋向正无穷z → +∞(表示感知器强烈匹配),那么σ(z) → 1;如果z趋向负无穷z → -∞(表示感知器强烈不匹配),那么σ(z) → 0。也就是说,只要使用σ(z)当作输出结果,那么输出就会变成一个连续性函数。
原来的输出曲线是下面这样。
 现在变成了这样。
现在变成了这样。
 推荐博客
推荐博客
神经网络,BP算法,计算图模型