Dijkstra(C++)
Dijkstra 的整体思路比较清晰
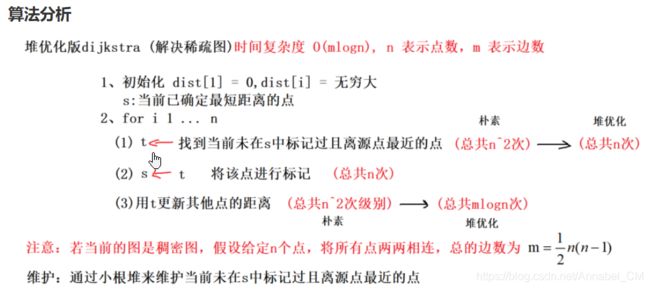
即进行n(n为n的个数)次迭代去确定每个点到起点的最小值 最后输出的终点的即为我们要找的最短路的距离

图片来自小
经典例题
AcWing 849. Dijkstra求最短路 I
给定一个n个点m条边的有向图,图中可能存在重边和自环,所有边权均为正值。
请你求出1号点到n号点的最短距离,如果无法从1号点走到n号点,则输出-1。
输入格式
第一行包含整数n和m。
接下来m行每行包含三个整数x,y,z,表示存在一条从点x到点y的有向边,边长为z。
输出格式
输出一个整数,表示1号点到n号点的最短距离。
如果路径不存在,则输出-1。
数据范围
1≤n≤500,
1≤m≤105,
图中涉及边长均不超过10000。
输入样例:
3 3
1 2 2
2 3 1
1 3 4
输出样例:
3
#includeAcWing 850. Dijkstra求最短路 II
给定一个n个点m条边的有向图,图中可能存在重边和自环,所有边权均为非负值。
请你求出1号点到n号点的最短距离,如果无法从1号点走到n号点,则输出-1。
输入格式
第一行包含整数n和m。
接下来m行每行包含三个整数x,y,z,表示存在一条从点x到点y的有向边,边长为z。
输出格式
输出一个整数,表示1号点到n号点的最短距离。
如果路径不存在,则输出-1。
数据范围
1≤n,m≤1.5×105,
图中涉及边长均不小于0,且不超过10000。
输入样例:
3 3
1 2 2
2 3 1
1 3 4
输出样例:
3
#include