YOLOv 4调用
YOLOv 4调用
更新
opencv4.4已经支持yolov4模型了,调用起来简单的多,调用方式同v3。
原答案
昨天听说YOLO出到第四代了,据说识别能力,识别速度双双提高。boss让我看一下方不方便调用到项目里。在Github上下载下来,make一下,试了一下可以运行。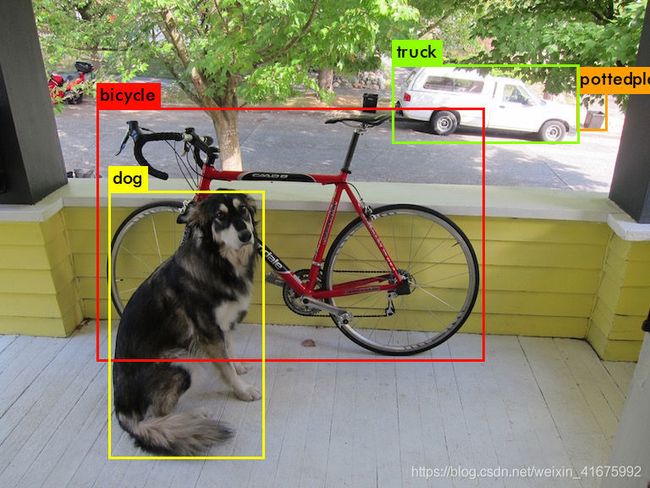
对比YOLOv 3可以发现,在卡车的边上多识别出盆栽(虽然我感觉那个不是盆栽hhh),只说下怎么调用。
在yolov3版本,opencv刚开始并不支持CUDA运算,最早是使用pytorch+opencv实现在目标检测算法在项目中的应用。自从opencv更新到4.20版本以后,增加了对cuda的支持,调用yolov3就简单的多了,opencv内对YOLOv3有很好的支持,cv::dnn::readNetFromDarknet 即可一步读取网络。
在对v4版本的调用最初以为把cfg文件和weights文件简单替换即可。(呵呵,天真了)。反复阅读yolo系列的github官网,终于在文章的最后看到了一丝希望,是一种我从来没用过调用的方式,将YOLO封装成dll文件进行调用。
在搜集了一些资料后,借鉴这两位老哥的流程,在YOLOv4版本下是可以成功的:
https://blog.csdn.net/stjuliet/article/details/87884976
https://blog.csdn.net/weixinhum/article/details/81475548?depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromBaidu-1&utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromBaidu-1
在调用过程中出现了一些问题值得注意:
问题1:我的版本中出现了这个问题。
error C4996: ‘sprintf’: This function or variable may be unsafe.
解决方案:打开项目----项目属性—配置属性----C/C++ ----预处理器----预处理定义,添加_CRT_SECURE_NO_DEPRECATE_SCL_SECURE_NO_DEPRECATE这两个宏。
问题2:opencv在版本更新中更换了很多名字,在第二个链接中CV_CAP_PROP_FRAME_COUNT在现版本opencv中已经更名为CAP_PROP_FRAME_COUNT。
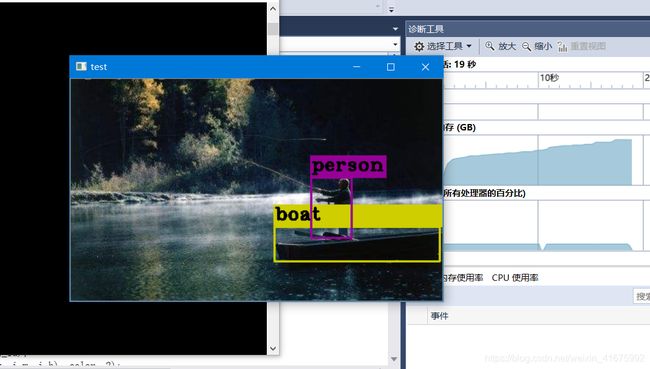
最后效果图:
无cuda版本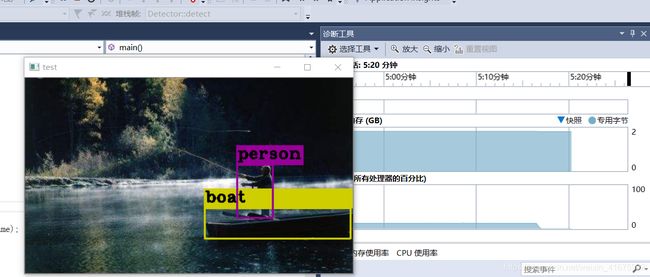 运行了5分钟才出结果,一度以为调用方法出了问题。无奈之下为自己快退休的笔记本安装CUDA驱动,加了驱动以后速度大大提升
运行了5分钟才出结果,一度以为调用方法出了问题。无奈之下为自己快退休的笔记本安装CUDA驱动,加了驱动以后速度大大提升
 本来想附上YOLOv4的weights文件,省去,结果超出了220MB上传限制了,哭了。
本来想附上YOLOv4的weights文件,省去,结果超出了220MB上传限制了,哭了。
更新补充一下代码部分
#include