【码上实战】【立体匹配系列】经典AD-Census: (3)代价计算
海内存知己,天涯若比邻。
下载完整源码,点击进入: https://github.com/ethan-li-coding/AD-Census
欢迎同学们在Github项目里讨论!
上篇主类中,我们对ADCensusStereo类做了较为详细的介绍,对于具体的算法实现并未过多的设计,本篇即开始带大家了解算法每个具体的功能模块的代码。
首先,是ADCenusu算法的第一个步骤:代价计算!
文章目录
-
- 算法
- 代码实现
-
- 类设计
- 类实现
- 实验
算法
在原理篇 > 【理论恒叨】【立体匹配系列】经典AD-Census: (1)代价计算中,博主已经对代价计算的原理有过交代,代价由AD代价和Census代价两部分之和组成。总代价公式如下:
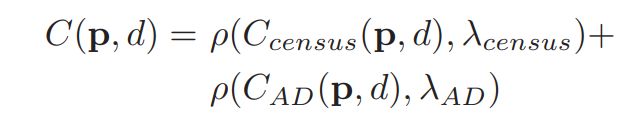
其中,
公式是很简单的,AD代价 C A D C_{AD} CAD为两个像素的颜色三通道差值的均值。

Census代价 C c e n s u s C_{census} Ccensus的计算方法则在博文SGM:代价计算中讲的很明白,不再赘述。
代码实现
类设计
我将代价计算写成一个类CostComputor,放在文件cost_computor.h/cost_computor.cpp中。
/**
* \brief 代价计算器类
*/
class CostComputor {
public:
CostComputor();
~CostComputor();
}
当然需要为CostComputor类设计一些公有接口,从而可以调用它们来达到计算代价的目的。
第一个我想到的是 初始化函数Initialize ,为计算代价做一些准备工作,比如我输入的彩色数据,但是计算Census需要灰度数据,所以我需要预分配一个保存灰度数据的数组。
第二个我想到的是 设置数据SetData 以及 设置参数SetParam ,这似乎是必不可少的,巧妇难为无米之炊,没有一个类能够在没有数据和参数的情况下把活干好。
第三个就是计算代价的接口 Compute 了,前面做的一切都是为了能够执行该接口以顺利完成代价计算。
最后一个是获取初始代价的指针 get_cost_ptr ,这意味着我将初始代价数据全权交给CostComputor来管理,我想这样职责会更加清晰。
我们来看看最终的类接口设计:
public:
/**
* \brief 初始化
* \param width 影像宽
* \param height 影像高
* \param min_disparity 最小视差
* \param max_disparity 最大视差
* \return true: 初始化成功
*/
bool Initialize(const sint32& width, const sint32& height, const sint32& min_disparity, const sint32& max_disparity);
/**
* \brief 设置代价计算器的数据
* \param img_left // 左影像数据,三通道
* \param img_right // 右影像数据,三通道
*/
void SetData(const uint8* img_left, const uint8* img_right);
/**
* \brief 设置代价计算器的参数
* \param lambda_ad // lambda_ad
* \param lambda_census // lambda_census
*/
void SetParams(const sint32& lambda_ad, const sint32& lambda_census);
/** \brief 计算初始代价 */
void Compute();
/** \brief 获取初始代价数组指针 */
float32* get_cost_ptr();
如上接口全部为公有函数,类的调用端可按逻辑次序调用。(意思就是不能先调用 Compute 再调用 Initialize 哦!)
为了完成代价计算,我们最关键的还是要实现具体的功能函数,我将其放到私有成员函数列表中,分别是计算灰度函数ComputeGray、Census变换函数CensusTransform、计算代价ComputeCost。你或许想问计算AD代价呢?因为其比较简单,所以我直接就在 ComputeCost 中实现了AD代价计算。
private:
/** \brief 计算灰度数据 */
void ComputeGray();
/** \brief Census变换 */
void CensusTransform();
/** \brief 计算代价 */
void ComputeCost();
最后是类所不可或缺的成员变量,比如影像尺寸、影像数据、算法参数、存储灰度数据的数组、存储Census变换值的数组、初始代价数组等,正是它们在类的作用域内始终保持着算法计算所需要的值,才能达到最后的计算目的。得用私有类型把它们保护起来,仅限类的内部使用,我们来看看吧!
private:
/** \brief 图像尺寸 */
sint32 width_;
sint32 height_;
/** \brief 影像数据 */
const uint8* img_left_;
const uint8* img_right_;
/** \brief 左影像灰度数据 */
vector<uint8> gray_left_;
/** \brief 右影像灰度数据 */
vector<uint8> gray_right_;
/** \brief 左影像census数组 */
vector<uint64> census_left_;
/** \brief 右影像census数组 */
vector<uint64> census_right_;
/** \brief 初始匹配代价 */
vector<float32> cost_init_;
/** \brief lambda_ad*/
sint32 lambda_ad_;
/** \brief lambda_census*/
sint32 lambda_census_;
/** \brief 最小视差值 */
sint32 min_disparity_;
/** \brief 最大视差值 */
sint32 max_disparity_;
/** \brief 是否成功初始化标志 */
bool is_initialized_;
我用vector来存储数据,不再像之前的算法一样使用过多的指针(部分同学会觉得指针比较难用),这样大家更容易接受,我也不用在管内存释放了。
类实现
我们先看看代价计算类CostComputor的初始化函数实现:
bool CostComputor::Initialize(const sint32& width, const sint32& height, const sint32& min_disparity, const sint32& max_disparity)
{
width_ = width;
height_ = height;
min_disparity_ = min_disparity;
max_disparity_ = max_disparity;
const sint32 img_size = width_ * height_;
const sint32 disp_range = max_disparity_ - min_disparity_;
if (img_size <= 0 || disp_range <= 0) {
is_initialized_ = false;
return false;
}
// 灰度数据(左右影像)
gray_left_.resize(img_size);
gray_right_.resize(img_size);
// census数据(左右影像)
census_left_.resize(img_size,0);
census_right_.resize(img_size,0);
// 初始代价数据
cost_init_.resize(img_size * disp_range);
is_initialized_ = !gray_left_.empty() && !gray_right_.empty() && !census_left_.empty() && !census_right_.empty() && !cost_init_.empty();
return is_initialized_;
}
首先,完成一些必要的参数如影像尺寸、视差范围等的赋值。
其次,为左右视图的灰度数据数组分配和图像尺寸等大的空间,用于存储彩色数据转换的灰度数据。为左右视图的Census数据数组分配和图像尺寸等大的空间,用于存储两视图的Census变换值。
最后,为初始代价数组分配尺寸为 W × H × D W × H × D W×H×D的空间,用于存储左视图所有像素所有候选视差下的代价值。初始代价还将传递给代价聚合步骤使用。
初始化完成,我们再来看AD-Censu的代价计算步骤:
- 计算灰度
- 基于灰度数据计算Census变换数据
- 计算代价
这三个步骤,我写成三个函数,放在私有函数列表中:
- ComputeGray
- CensusTransform
- ComputeCost
我们一个个介绍:
ComputeGray
彩色数据计算灰度很简单,给R、G、B三个通道分配三个固定的权值,计算三通道的加权和。
至于为什么是这三个数字我智能说我忘了,反正用了很久了。
我们看代码:
void CostComputor::ComputeGray()
{
// 彩色转灰度
for (sint32 n = 0; n < 2; n++) {
const auto color = (n == 0) ? img_left_ : img_right_;
auto& gray = (n == 0) ? gray_left_ : gray_right_;
for (sint32 y = 0; y < height_; y++) {
for (sint32 x = 0; x < width_; x++) {
const auto b = color[y * width_ * 3 + 3 * x];
const auto g = color[y * width_ * 3 + 3 * x + 1];
const auto r = color[y * width_ * 3 + 3 * x + 2];
gray[y * width_ + x] = uint8(r * 0.299 + g * 0.587 + b * 0.114);
}
}
}
}
CensusTransform
Census变换的原理请看:经典SGM:(2)匹配代价计算之Census变换
代码和SGM计算Census变换一样,我就不重复说了,我们直接看代码:
void adcensus_util::census_transform_9x7(const uint8* source, vector<uint64>& census, const sint32& width, const sint32& height)
{
if (source == nullptr || census.empty() || width <= 9 || height <= 7) {
return;
}
// 逐像素计算census值
for (sint32 i = 4; i < height - 4; i++) {
for (sint32 j = 3; j < width - 3; j++) {
// 中心像素值
const uint8 gray_center = source[i * width + j];
// 遍历大小为9x7的窗口内邻域像素,逐一比较像素值与中心像素值的的大小,计算census值
uint64 census_val = 0u;
for (sint32 r = -4; r <= 4; r++) {
for (sint32 c = -3; c <= 3; c++) {
census_val <<= 1;
const uint8 gray = source[(i + r) * width + j + c];
if (gray < gray_center) {
census_val += 1;
}
}
}
// 中心像素的census值
census[i * width + j] = census_val;
}
}
}
ComputeCost
计算代价时,我们遍历左视图每一个像素的每一个候选视差,当左视图像素 p p p视差为 d d d时,我们可以通过视差公式 x r = x l − d x_r=x_l-d xr=xl−d计算出右视图上的同名点坐标,并获取其颜色数据以及Census变换值,颜色数据可以用于计算AD代价,Census变换只可以用于计算Census代价,计算方式请看原理篇:经典AD-Census: (1)代价计算
代码如下:
void CostComputor::ComputeCost()
{
const sint32 disp_range = max_disparity_ - min_disparity_;
// 预设参数
const auto lambda_ad = lambda_ad_;
const auto lambda_census = lambda_census_;
// 计算代价
for (sint32 y = 0; y < height_; y++) {
for (sint32 x = 0; x < width_; x++) {
const auto bl = img_left_[y * width_ * 3 + 3 * x];
const auto gl = img_left_[y * width_ * 3 + 3 * x + 1];
const auto rl = img_left_[y * width_ * 3 + 3 * x + 2];
const auto& census_val_l = census_left_[y * width_ + x];
// 逐视差计算代价值
for (sint32 d = min_disparity_; d < max_disparity_; d++) {
auto& cost = cost_init_[y * width_ * disp_range + x * disp_range + (d - min_disparity_)];
const sint32 xr = x - d;
if (xr < 0 || xr >= width_) {
cost = 1.0f;
continue;
}
// ad代价
const auto br = img_right_[y * width_ * 3 + 3 * xr];
const auto gr = img_right_[y * width_ * 3 + 3 * xr + 1];
const auto rr = img_right_[y * width_ * 3 + 3 * xr + 2];
const float32 cost_ad = (abs(bl - br) + abs(gl - gr) + abs(rl - rr)) / 3.0f;
// census代价
const auto& census_val_r = census_right_[y * width_ + xr];
const float32 cost_census = static_cast<float32>(adcensus_util::Hamming64(census_val_l, census_val_r));
// ad-census代价
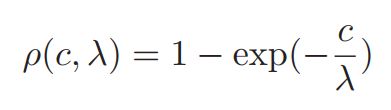
cost = 1 - exp(-cost_ad / lambda_ad) + 1 - exp(-cost_census / lambda_census);
}
}
}
}
以上我们将代价计算的关键子步骤都实现了,但还需要将这些步骤依次执行,才能得到最终的初始代价计算结果。我们的公有函数Compute就是完成这个工作。实现如下:
void CostComputor::Compute()
{
if(!is_initialized_) {
return;
}
// 计算灰度图
ComputeGray();
// census变换
CensusTransform();
// 代价计算
ComputeCost();
}
关于代价计算类CostComputor的实现我们就介绍到这里,其他一些未介绍的接口都比较简单,我们就不占篇幅了,大家看完整源码自行理解。
最后该类的使用,我们在主类ADCensusStereo中完成。
首先在主类的初始化函数中,我们自然应该对代价计算类进行初始化:
// 初始化代价计算器
if(!cost_computer_.Initialize(width_,height_,option_.min_disparity,option_.max_disparity)) {
is_initialized_ = false;
return is_initialized_;
}
其次在主类ADCensusStereo的代价计算函数ComputeCost中,我们调用代价计算类CostComputor的相关公有成员函数完成代价计算:
void ADCensusStereo::ComputeCost()
{
// 设置代价计算器数据
cost_computer_.SetData(img_left_, img_right_);
// 设置代价计算器参数
cost_computer_.SetParams(option_.lambda_ad, option_.lambda_census);
// 计算代价
cost_computer_.Compute();
}
实验
顺利来到我们的实验环节。
实验数据还是老朋友Cone:

|

|
我做了三个实验
- 只考虑AD代价
- 只考虑Census代价
- 考虑Ad-Census代价
我们来看看实验结果:

|

|

|
有一些很明显的结论我们可以肉眼观察出
- AD整体结果最差,但是细节表现优于Census,边缘也比Census更清晰。
- Census整体效果优于AD,但是边缘不清晰,细节表现较AD弱。
- AD-Censu结合两者优点,既能达到好的的整体效果,且在细节和边缘的表现也很不错。
结论其实可以理解,给予窗口内相对亮度差的Census算法对光照不敏感,鲁棒性好,但是损失了一定的细节嗅探能力;AD算法对光照很敏感,鲁棒性差,但是同时对细节变化也更加敏感,可以察觉出更轻微的细节差异。
而AD-Census则取长补短,获得了最佳的效果。
好了,本篇就到这里结束,下篇为大家带来的是基于十字交叉域的代价聚合。
下载AD-Census完整源码,点击进入: https://github.com/ethan-li-coding/AD-Census
欢迎同学们在Github项目里讨论,如果觉得博主代码质量不错,右上角给颗星!感谢!
博主简介:
Ethan Li 李迎松(知乎:李迎松)
武汉大学 摄影测量与遥感专业博士
主方向立体匹配、三维重建
2019年获测绘科技进步一等奖(省部级)
爱三维,爱分享,爱开源
GitHub: https://github.com/ethan-li-coding (欢迎follow和star)
个人微信:
欢迎交流!
关注博主不迷路,感谢!
博客主页:https://ethanli.blog.csdn.net
