CS224W笔记-第八课
CS224W笔记-第八课:图神经网络
第八课开始,Jure又回归了。本节课的内容是图神经网络(Graph Neural Network, GNN),这也是目前非常新和非常热的一个内容。
在第七课中介绍的图表征学习的方法,总体而言都可以被称为“浅层”的学习。因为其中的编码器 E N C ( v ) \mathrm{ENC(v)} ENC(v)的本质还是一个embedding查找表,同时节点的相似度也只是依赖于它们在图机构里的共现相似度。这种浅层方法的缺点也是很明显:
- 查找表需要 O ( ∣ V ∣ ) O(|V|) O(∣V∣)个参数,每个节点都有自己的embedding参数。
- 内在的是“transductive”转导式的,无法对于新加入的节点直接给予embedding向量。
- 仅仅关注图的结构,没法把节点的特征加入embedding的计算。
这节课将会使用多层非线形变换函数来作为 E N C ( v ) \mathrm{ENC(v)} ENC(v),完成图表征的学习。
图上深度神经网络的基本概念
基本设定
一个图 G G G,其中:
- V V V是节点的集合;
- A A A是 G G G的邻接矩阵(对称的)
- 节点特征 X ∈ R m × ∣ V ∣ X \in \Bbb{R}^{m\times|V|} X∈Rm×∣V∣
其中,对于没有特征的节点,可以给予独热的编码,或者给一个固定值,比如1。
算法核心思想
通过一个节点所在的邻居社区的特征和图结构来表征这个节点,因为这个节点的邻居和图结构一起构建了一个计算图。然后,再使用神经网络来聚合来自邻居(以及图结构)的信息。
这里一个核心的点在于:不同的点,通过聚合多层邻居会发现,它们的计算图是不一样的,因此神经网络学习到了不同的邻居图结构图特征。如下图:
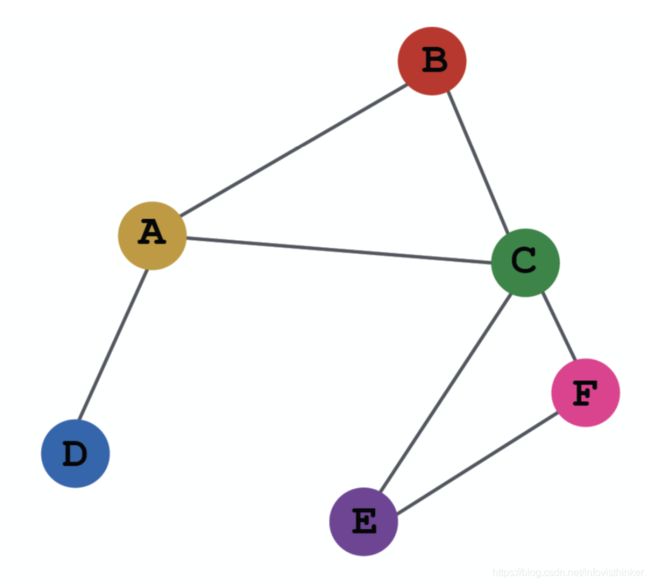

图中每个节点在两层聚合所见到的图结构是完全不同的。
聚合方法:
针对每个节点,这种多层聚合的基本思路是:
- 从邻居获取它们的特征或者embedding;
- 和节点自己的特征或embedding进行非线性变换,形成新一层的embedding。
如下图所示:
 这个图从右往左看,就相当于一个多层神经网络,输入层是每个节点的特征,中间每一层节点里的特这就已经是embedding了。就像上图里的 X C X_C XC是节点 C C C的初始特征,而第一层里的节点 C C C就已经是embedding后的值了。
这个图从右往左看,就相当于一个多层神经网络,输入层是每个节点的特征,中间每一层节点里的特这就已经是embedding了。就像上图里的 X C X_C XC是节点 C C C的初始特征,而第一层里的节点 C C C就已经是embedding后的值了。
那么这里面的核心是尖头对应的方盒子就是整个算法的关键。有两个问题:
- 如何聚合来自邻居的特征:简单的方法就是对它们求平均;
- 聚合后的特征如何计算新节点的embedding:通过一个神经网络进行特征抽取。
公式:
按照上面的思想,可以给出下面的计算公式:
h v 0 = x v h_v^0 = \mathrm{x}_v hv0=xv
h v k = σ ( W k ∑ u ∈ N ( v ) h u k − 1 ∣ N ( v ) ∣ + B K h v k − 1 ) , ∀ k ∈ { 1 , … , K } h_v^k = \sigma(\mathrm{W}_k \displaystyle \sum_{u\in N(v)} \frac{h_u^{k-1}}{|N(v)|}+B_Kh_v^{k-1}), \forall{k} \in \{1, \dots, K\} hvk=σ(Wku∈N(v)∑∣N(v)∣huk−1+BKhvk−1),∀k∈{ 1,…,K}
z v = h v K z_v = h_v^K zv=hvK
这里初始的输入层就是每个节点自己的特征,最后的输出就是节点的embedding向量。
中间每层的隐藏层都是上面核心思路里的算法。其中, σ \sigma σ是一个非线性函数,如 R E L U \mathrm{RELU} RELU。 ∑ \sum ∑部分就是对每个节点进行邻居特征聚合平均的运算,然后进行一次线性变换就,即与权重矩阵 W k \mathrm{W}_k Wk相乘。括号里后半部分是和节点自身的embedding结合。
在这个公式里,我们需要训练的参数就是 W k W_k Wk和 B k B_k Bk。
模型的训练
当获得了节点的表征向量 z v z_v zv后,就可以设计损失函数来训练神经网络的参数了。参数的训练可以是:
- 非监督学习:在第七课所介绍的所有的相似度计算方法都可以使用来进行网络的训练;
- 监督学习:可以对点分类/回归、边分类/回归、边预测和整图分类/回归,设计损失函数,进行网络训练。常见的就像课程里介绍的针对2分类的交叉熵损失函数。
L = ∑ v ∈ V y v l o g ( σ ( z v ⊤ θ ) ) + ( 1 − y v ) l o g ( 1 − σ ( z v ⊤ θ ) ) ) \mathcal{L} = \displaystyle \sum_{v \in V}y_vlog(\sigma(z_v^{\top}\theta)) + (1 -y_v)log(1-\sigma(z_v^{\top}\theta))) L=v∈V∑yvlog(σ(zv⊤θ))+(1−yv)log(1−σ(zv⊤θ)))
归纳性(Inductive)能力
相比于上节课讲到的Transductive(转导式)的方法,深度图神经网络具有比较好的归纳(Inductive)能力,即它不局限于训练使用的图,而是可以被用于没见过的点、边和图。
主要原因是:构成深度图神经网络的参数是共享的,不受训练数据的束缚。哪怕全新的图数据,也可以使用训练得到的参数来进行embedding向量的计算。
GNN的变体
GraphSage模型
基本思想
把GCN的思想进一步泛化成通用的“消息传递+本地聚合”的模式。
算法公式
h v k = σ ( [ A k ⋅ A G G ( h u k − 1 , ∀ u ∈ N ( v ) ) , B k h v k − 1 ] ) h_v^k=\sigma([A_k \cdot \mathrm{AGG}(h_u^{k-1}, \forall u \in N(v)), B_k h_v^{k-1}]) hvk=σ([Ak⋅AGG(huk−1,∀u∈N(v)),Bkhvk−1])
SAGE的这个公式和GCN有两个区别:
- 从邻居聚合的embedding值不是和节点自身的embedding值相加,而是 c o n c a t concat concat起来,即公式里的 [ ] [] []符号;
- 用一个通用的 A G G \mathrm{AGG} AGG函数代替了GCN的求平均的函数。
常用的聚合\mathrm{AGG}函数:
- Mean: A G G = ∑ u ∈ N ( v ) h u k − 1 ∣ N v ∣ \mathrm{AGG}=\displaystyle\sum_{u \in N(v)}\frac{\mathbf{h}_u^{k-1}}{|N_v|} AGG=u∈N(v)∑∣Nv∣huk−1
- Pool: A G G = γ ( { Q h u k − 1 , ∀ u ∈ N ( v ) } ) \mathrm{AGG}=\gamma(\{\mathbf{Q}\mathbf{h}_u^{k-1}, \forall u \in N(v)\}) AGG=γ({ Qhuk−1,∀u∈N(v)}),其中 γ \gamma γ是元素级别的运算,如 m e a n mean mean和 m a x max max。
- LSTM: A G G = L S T M ( [ h u k − 1 , ∀ u ∈ π ( N ( v ) ) ] ) \mathrm{AGG}=\mathrm{LSTM}([\mathbf{h}_u^{k-1}, \forall u \in \pi(N(v))]) AGG=LSTM([huk−1,∀u∈π(N(v))]),其中的 π \pi π是指对所有的邻居节点进行一定的洗牌,从而避免 L S T M \mathrm{LSTM} LSTM所带来的顺序依赖。
高效实现
很多聚合算法可以用稀疏矩阵的计算来高效地实现的:
比如: H k − 1 = [ h 1 k − 1 , h 2 k − 1 , … , h n k − 1 ] H^{k-1}=[h_1^{k-1}, h_2^{k-1}, \dots, h_n^{k-1}] Hk−1=[h1k−1,h2k−1,…,hnk−1],则
∑ u ∈ N ( v ) h u k − 1 ∣ N v ∣ ⇒ H k = D − 1 A H k − 1 \displaystyle\sum_{u \in N(v)}\frac{\mathbf{h}_u^{k-1}}{|N_v|} \rArr H^{k}=D^{-1}AH^{k-1} u∈N(v)∑∣Nv∣huk−1⇒Hk=D−1AHk−1 H k = D − 1 / 2 A D 1 / 2 H k − 1 H^{k}=D^{-1/2}AD^{1/2}H^{k-1} Hk=D−1/2AD1/2Hk−1
GAT图注意力网络
基本思想
对于边上的消息传递,对于不同的邻居设定不同的权值,采用加权聚合的方式。同时,这个权重也可以通过学习训练获得。这时候用到了注意力策略。
- 节点对于邻居的消息,加上注意力。
- 对于不同的邻居指定不同的权重。
实现细节
- 设定某种注意力机制 α \alpha α,它计算出节点 v v v和 u u u所在边 e e e的注意力系数 e v u e_{vu} evu: e v u = α ( W k h u k − 1 , W k h v k − 1 ) e_{vu}=\alpha(W_k h_u^{k-1}, W_k h_v^{k-1}) evu=α(Wkhuk−1,Wkhvk−1)
- 对每个节点的所有邻居边,使用softmax方法对边上的 e v u e_{vu} evu进行正规化: α v u = e x p ( e v u ) ∑ k ∈ N ( v ) e x p ( e v k ) \alpha_{vu}=\frac{\mathrm{exp}(e_{vu})}{\sum_{k\in N(v)}\mathrm{exp}(e_{vk})} αvu=∑k∈N(v)exp(evk)exp(evu)
- 再使用正规化后的 α v u \alpha_{vu} αvu,对节点的邻居的embedding进行加权求和: h v k = σ ( ∑ u ∈ N ( v ) α v u W k h u k − 1 ) h_v^k=\sigma(\sum_{u \in N(v)}\alpha_{vu}W_k h_u^{k-1}) hvk=σ(u∈N(v)∑αvuWkhuk−1)
注意力机制
具体的注意力机制可以有多种选择,可以是简单的运算,还可以是带有参数的、可以和图神经网络一起训练的函数。
最新的GAT是多头注意力机制,包括并行独立的多个 α \alpha α,计算完成后,多个头再被合并起来或者加起来。
常见的注意力方法可以参考Attention is all you need这个论文里的方法实现。
GAT的特性
- 计算效率高:注意力计算和聚合计算都可以被并行化。
- 存储效率高:不超过 O ( V + E ) O(V+E) O(V+E)的空间复杂度。
- 局部性:只关注局部信息
- 可用作归纳性推断:参数是共享的,且不依赖于训练图自身。
GCN实用案例:Pinterest
Pinterest的案例是一个针对二部图进行物品推荐的例子。
问题设定
给定Pinterest的二部图 G ( V , E ) G(V, E) G(V,E)。 V V V包含了两种节点 p i n pin pin和 b o a r d board board, E E E是从 p i n pin pin指向 b o a r d board board的边且仅能从 p i n pin pin指向 b o a r d board board。
图数据包括2B个 p i n pin pin,1B个 b o a r d board board,20B条边。且图是动态的,每时每刻都有新的点和边加入。点上面的特征很丰富,包含文字、图片等。
任务目标
对 p i n pin pin的节点计算embedding,从而让在图上更接近的节点在embedding的向量空间里也接近。从而给下游的推荐任务提供更好的输入。
算法细节
课程里面没有详细地介绍PinSage算法的细节。可以参考Graph Convolutional Neural Networks for Web-Scale Recommender Systems.
论文里的算法部分倒是不算很难,和GraphSage的算法类似。值得研究的是针对Pinterest的海量数据所做的工程优化,这个部分可以参考全面理解PinSage。