【ARXML专题】-2-创建一个Classic CAN(经典CAN2.0)/CANFD的系统描述ARXML文件
目录
1 创建一个AUTOSAR系统描述
2 物理层命名以及创建ECU
3 新建一个Frame
4 新建一个PDU
5 新建一个signal
6 结尾
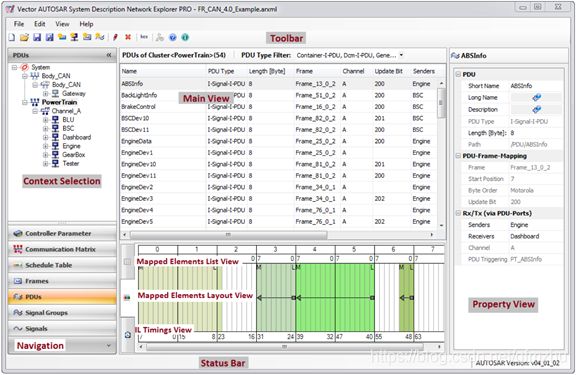
AUTOSAR System Description Network Explorer是一个文件编辑器,支持可视化和编辑系统描述的AUTOSAR系统描述文件和ECU摘录的通信内容,它支持架构版本4.0.3、4.1.2、4.2.1、4.2.2和4.3.0。AUTOSAR系统描述(ARXML)文件是基于XML的文件格式,描述网络通信的元素基于AUTOSAR系统模板。其界面如下:
1 创建一个AUTOSAR系统描述
双击“AUTOSAR Explorer 2.0”快捷方式(见图1-1),打开“AUTOSAR System Description Network Explorer”(见图1-2)。
 图1-1
图1-1
 图1-2
图1-2
在菜单栏中,依次选择“File”à“New File…”(见图1-3),弹出“Create New File”对话框。接着在该对话框中选择项目需要的“Autosar格式版本”和“物理层的通信方式”,单击“OK” (见图1-4)。
 图1-3
图1-3
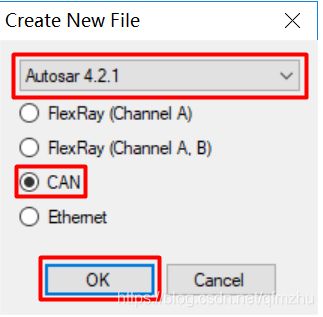 图1-4
图1-4
注意:
创建完成后,就无法再修改“Autosar格式版本”。
根据所选类型创建一个具有通信Cluster和物理通道的AUTOSAR系统描述文件(见图1-5)。单击“保存”按钮,选择合适的路径,并命名这个描述文件(见图1-6)。
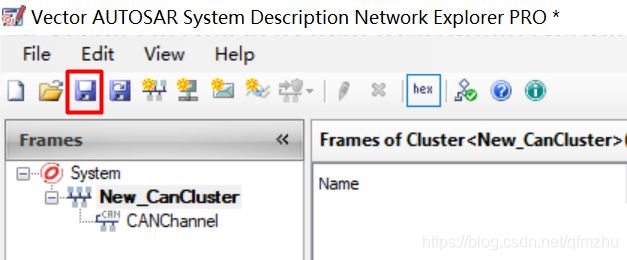 图1-5
图1-5
 图1-6
图1-6
2 物理层命名以及创建ECU
完成第1章后,重新打开Test_CAN.arxml(见图2-1),选中通信Cluster,在其右侧的属性视图中,重命名这个Cluster,并设置这个CAN通信的波特率(见图2-2)。
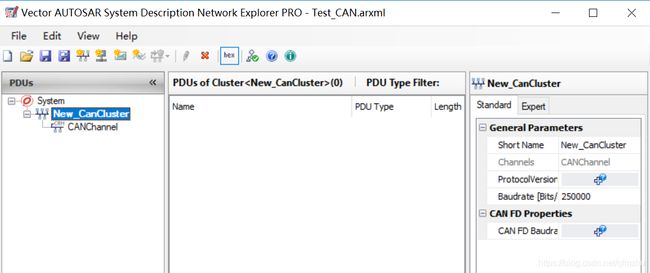 图2-1
图2-1
 图2-2
图2-2
创建ECU方法,有两种:
- 菜单栏中,依次选择“Edit”à“Create Ecu…”(见图2-3);
- 工具栏中,单击“Create ECU”(见图2-4)。
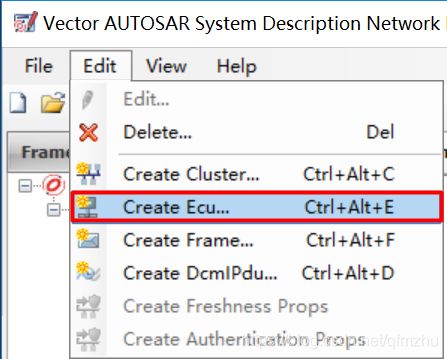 图2-3
图2-3
 图2-4
图2-4
弹出“New ECU”对话框(见图2-5)。
 图2-5
图2-5
重命名ECU,单击“OK”(见图2-6)。
 图2-6
图2-6
完成后的效果如下(见图2-7):
 图2-7
图2-7
3 新建一个Frame
创建Frame方法,有三种:
- 先在“导航栏”中选择“Frames”,然后在主视图中鼠标右键,在上下文中选择“Create Frame…”(见图3-1);
 图3-1
图3-1
- 依次在菜单栏中选择“Edit”-->“Create Frame…”(见图3-2);
 图3-2
图3-2
- 工具栏中,单击“Create Frame”(见图3-3)。
 图3-3
图3-3
弹出“Edit Frame”对话框(见图3-4)。
 图3-4
图3-4
“Edit Frame”对话框修改如下(见图3-5)。
 图3-5
图3-5
注意:
1、“Edit Frame”对话框中的“Name”,可以理解为“DBC中Message名称”;
2、“Edit Frame”对话框中的“Length”表示帧的数据域长度,单位Byte;
3、“Edit Frame”对话框中的“ID”表示CAN_ID,十六进制表示;
4、“Edit Frame”对话框中的“Addressing Mode”有:Standard(标准帧)和Extended(扩展帧)两个选项,表示“帧类型”,可以理解为“DBC中Message里的Type”;
5、“Edit Frame”对话框中的“CAN FD Supported”选项:不勾选,表示是经典CAN2.0帧;勾选,表示是CAN FD帧;
6、“Edit Frame”对话框中的“Sender/Receiver Relations”用来定义该Frame帧的发送和接收ECU。图3-6表示该Frame帧的发送节点是OBC;图3-7表示该Frame帧的接收节点是OBC。
 图3-6
图3-6
 图3-7
图3-7
完成后的效果如下(见图3-8) ,按照此方法可以添加其它的Frame帧:
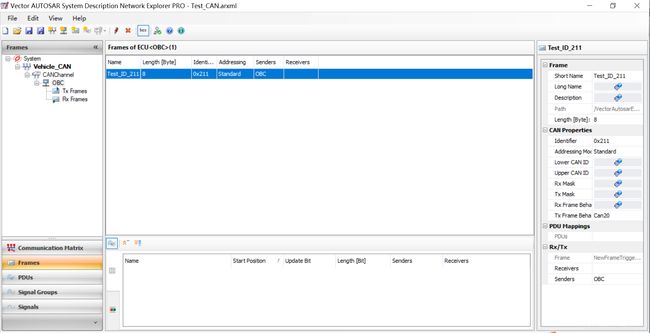 图3-8
图3-8
4 新建一个PDU
PDU的概念在DBC中是没有的。
PDU(Protocol Data Unit:协议数据单元)代表在帧上传输的数据单元。 它包含在协议栈中交换的有效负载和控制信息。 根据PDU的应用和AUTOSAR格式版本,AUTOSAR模型可以区分不同类型的PDU。实际的使用:将Signal信号映射的PDU当中。
接着图3-5,在PDU-Frame-Mapping中,选择“Signal-I-PDU” (见图4-1),弹出“Edit Signal-I-PDU”对话框,根据需要编辑相关的信息(见图4-2)。
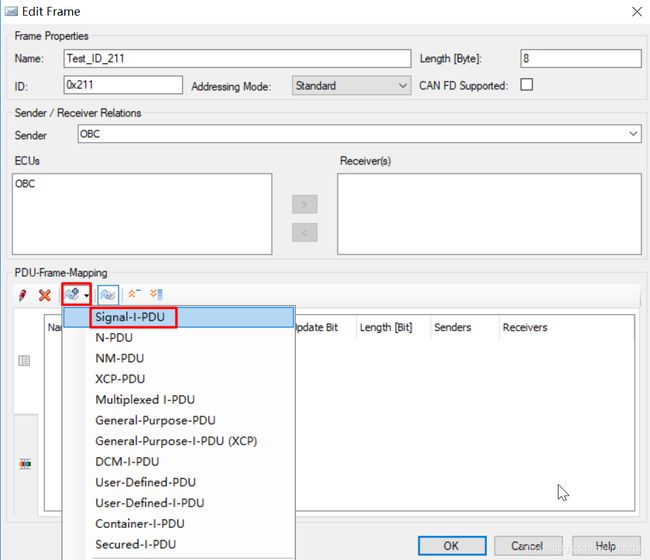 图4-1
图4-1
注意:常用的有以下PDU。
Signal-I-PDU:
N-PDU: 网络层PDU。由传输协议模块用于分段I-PDU;
NM-PDU:
XCP-PDU:
General-Purpose-I-PDU(XCP):
multiplexed I-PDU: I-PDU在两个COM I-PDU中组装在IpduM模块中, 将Signal-I-PDU映射到静态和动态段。
DCM-I-PDU:
 图4-2
图4-2
注意:
“Edit Signal-I-PDU”中的信息一般默认不修改。
5 新建一个signal
接着图3-5,在Mapped Signals中,选择“Signal” (见图5-1),弹出“Edit Signal”对话框(见图5-2)。
 图5-1
图5-1
 图5-2
图5-2
根据需要编辑相关的信息(见图5-3,图5-4,图5-5,图5-6)。
 图5-3
图5-3
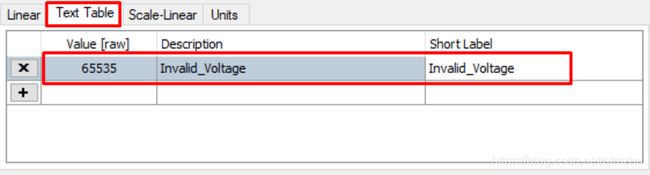 图5-4
图5-4
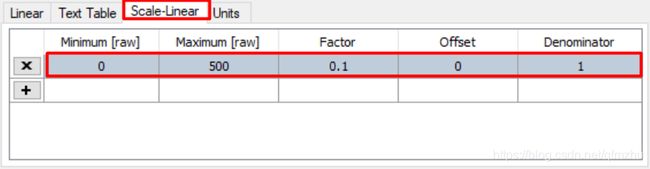 图5-5
图5-5
 图5-6
图5-6
注意:
- “Edit Signal”对话框中的“Name”,可以理解为“DBC中Signal名称”;
- “Edit Signal”对话框中的“Length”,表示信号的长度,单位Bit;
- “Edit Signal”对话框中的“Data Type Policy”,对于每个ISignal,都有一个DataTypePolicy定义,在大多数情况下将确定信息源。
- “Edit Signal”对话框中的“Position[Bit]”,表示信号的起始位;
- “Edit Signal”对话框中的“Update Bit”,表示信号的更新位;
- “Edit Signal”对话框中的“Byte Order”,表示信号的字节顺序:Intel,Motorola,Opaque;
- “Edit Signal”对话框中的“Transfer Property”,表示信号的触发方式:Pending,Triggered,TriggeredOnChange,TriggeredWithoutRepetition,TriggeredOnChangeWithoutRepetition。相关的解释参加AUTOSAR COM标准;
- “Edit Signal”对话框中的“Sender/Receiver Relations”,表示该信号是接收信号,还是发送信号,或者及不接收也发不发送;
- “Edit Signal”对话框中的“Base Type”,定义了信号的一种编码:数据类型名称,符号类型(是否有符号),长度。当多个信号表示的物理含义相同,且信号长度相同时,可以在下拉框中选择相同的Base Type;
- “Edit Signal”对话框中的“Computation Method”,描述了将信号传输的原始值转换为物理值的转换规则,信号的范围,信号的单位,无效信号的定义
完成后的效果如下(见图5-7),按照此方法可以添加其它的Signal信号:
 图5-7
图5-7
自此一个AUTOSAR的系统描述ARXML文件就生成好了。