CV目标检测 Task01: 两个年轻人-目标检测基础和VOC数据集 打卡笔记-Datawhale
Task01: 两个年轻人-目标检测基础和VOC数据集
- 前言
- 3.1、目标检测基本概念
-
- 3.1.1 什么是目标检测
- 3.1.2 目标检测的思路
- 3.1.3 目标框定义方式
- 3.1.4 交并比(IoU)
- 3.1.5 小结
- 3.2 目标检测数据集VOC
-
- 3.2.2 VOC数据集的dataloader的构建
- 3.2.3 小结
- 对transform内函数解释
前言
蓝色部分为记录的笔记
在task1中,我们需要学习两块内容:目标检测基本概念 和 目标检测经典的VOC数据集,分别对应《动手学CV-Pytorch》的3.1和3.2两节:
目标检测基本概念.
目标检测数据集VOC.
学习任务:
准备好Pytorch环境
了解目标检测的一些基本概念,包括目标框的两种表示形式,IoU等
下载好VOC数据集
学习了解VOC数据集的格式,以及如何用代码读取VOC数据集,构建DataLoader
3.1、目标检测基本概念
3.1.1 什么是目标检测
目标检测是计算机视觉中的一个重要任务,近年来传统目标检测方法已经难以满足人们对目标检测效果的要求,随着深度学习在计算机视觉任务上取得的巨大进展,目前基于深度学习的目标检测算法已经成为主流。
相比较于基于深度学习的图像分类任务,目标检测任务更具难度。
具体区别如图3-1所示。
图像分类:只需要判断输入的图像中是否包含感兴趣物体。
目标检测:需要在识别出图片中目标类别的基础上,还要精确定位到目标的具体位置,并用外接矩形框标出。

3.1.2 目标检测的思路
自2012年Alex Krizhevsky凭借Alex在ImageNet图像分类挑战赛中拿下冠军之后,深度学习在图像识别尤其是图像分类领域开始大放异彩,大众的视野也重新回到深度神经网络中。紧接着,不断有更深更复杂的网络出现,一再刷新ImageNet图像分类比赛的记录。
大家发现,通过合理的构造,神经网络可以用来预测各种各样的实际问题。于是人们开始了基于CNN的目标检测研究, 但是随着进一步的探索大家发现,似乎CNN并不善于直接预测坐标信息。并且一幅图像中可能出现的物体个数也是不定的,模型如何构建也比较棘手。
因此,人们就想,如果知道了图中某个位置存在物体,再将对应的局部区域送入到分类网络中去进行判别,那我不就可以知道图像中每个物体的位置和类别了吗?
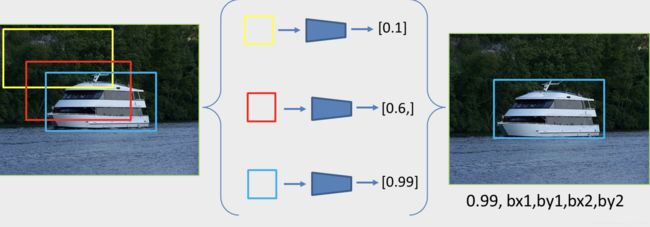
但是,怎么样才能知道每个物体的位置呢?显然我们是没办法知道的,但是我们可以去猜啊!所谓猜,其实就是通过滑窗的方式,罗列图中各种可能的区域,一个个去试,分别送入到分类网络进行分类得到其类别,同时我们会对当前的边界框进行微调,这样对于图像中每个区域都能得到(class,x1,y1,x2,y2)五个属性,汇总后最终就得到了图中物体的类别和坐标信息。
总结一下我们的这种方案思路:先确立众多候选框,再对候选框进行分类和微调。
观察下图3-2,更形象的理解下这种思想:
3.1.3 目标框定义方式
任何图像任务的训练数据都要包括两项,图片和真实标签信息,通常叫做GT。
图像分类中,标签信息是类别。目标检测的标签信息除了类别label以外,需要同时包含目标的位置信息,也就是目标的外接矩形框bounding box。
用来表达bbox的格式通常有两种,(x1, y1, x2, y2) 和 (c_x, c_y, w, h) ,如图3-3所示:
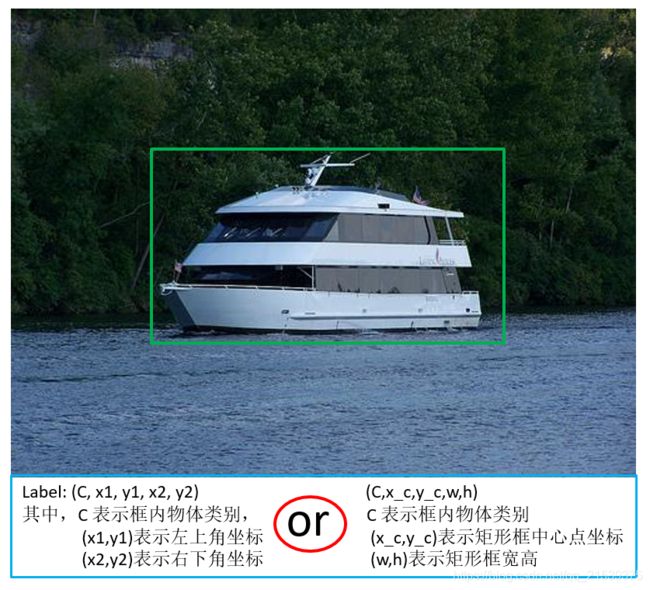
之所以使用两种不同的目标框信息表达格式,是因为两种格式会分别在后续不同场景下更加便于计算。
两种格式互相转换的实现在utils.py中,代码也非常简单:
def xy_to_cxcy(xy):
"""
Convert bounding boxes from boundary coordinates (x_min, y_min, x_max, y_max) to center-size coordinates (c_x, c_y, w, h).
:param xy: bounding boxes in boundary coordinates, a tensor of size (n_boxes, 4)
:return: bounding boxes in center-size coordinates, a tensor of size (n_boxes, 4)
"""
return torch.cat([(xy[:, 2:] + xy[:, :2]) / 2, # c_x, c_y
xy[:, 2:] - xy[:, :2]], 1) # w, h
def cxcy_to_xy(cxcy):
"""
Convert bounding boxes from center-size coordinates (c_x, c_y, w, h) to boundary coordinates (x_min, y_min, x_max, y_max).
:param cxcy: bounding boxes in center-size coordinates, a tensor of size (n_boxes, 4)
:return: bounding boxes in boundary coordinates, a tensor of size (n_boxes, 4)
"""
return torch.cat([cxcy[:, :2] - (cxcy[:, 2:] / 2), # x_min, y_min
cxcy[:, :2] + (cxcy[:, 2:] / 2)], 1) # x_max, y_max
笔记:
用torch.cat()将两个形状为(n,2)的tensor在第一维度拼接成(n,4)
3.1.4 交并比(IoU)
在目标检测任务中,关于IOU的计算贯穿整个模型的训练测试和评价过程,是非常非常重要的一个概念,其目的是用来衡量两个目标框的重叠程度。
IoU的全称是交并比(Intersection over Union),表示两个目标框的交集占其并集的比例。图3-4为IOU计算示意图:

图中可以看到,分子中黄色区域为红bbox和绿bbox的交集,分母中黄+红+绿区域为红bbox和绿bbox的并集,两者之比即为iou。
那么具体怎么去计算呢?这里给出计算流程的简述:
1.首先获取两个框的坐标,红框坐标: 左上(red_x1, red_y1), 右下(red_x2, red_y2),绿框坐标: 左上(green_x1, green_y1),右下(green_x2, green_y2)
2.计算两个框左上点的坐标最大值:(max(red_x1, green_x1), max(red_y1, green_y1)), 和右下点坐标最小值:(min(red_x2, green_x2), min(red_y2, green_y2))
3.利用2算出的信息计算黄框面积:yellow_area
4.计算红绿框的面积:red_area 和 green_area
5.iou = yellow_area / (red_area + green_area - yellow_area)
如果文字表述的不够清晰,就再看下代码:
def find_intersection(set_1, set_2):
"""
Find the intersection of every box combination between two sets of boxes that are in boundary coordinates.
:param set_1: set 1, a tensor of dimensions (n1, 4)
:param set_2: set 2, a tensor of dimensions (n2, 4)
:return: intersection of each of the boxes in set 1 with respect to each of the boxes in set 2, a tensor of dimensions (n1, n2)
"""
# PyTorch auto-broadcasts singleton dimensions
lower_bounds = torch.max(set_1[:, :2].unsqueeze(1), set_2[:, :2].unsqueeze(0)) # (n1, n2, 2)
upper_bounds = torch.min(set_1[:, 2:].unsqueeze(1), set_2[:, 2:].unsqueeze(0)) # (n1, n2, 2)
intersection_dims = torch.clamp(upper_bounds - lower_bounds, min=0) # (n1, n2, 2)
return intersection_dims[:, :, 0] * intersection_dims[:, :, 1] # (n1, n2)
def find_jaccard_overlap(set_1, set_2):
"""
Find the Jaccard Overlap (IoU) of every box combination between two sets of boxes that are in boundary coordinates.
:param set_1: set 1, a tensor of dimensions (n1, 4)
:param set_2: set 2, a tensor of dimensions (n2, 4)
:return: Jaccard Overlap of each of the boxes in set 1 with respect to each of the boxes in set 2, a tensor of dimensions (n1, n2)
"""
# Find intersections
intersection = find_intersection(set_1, set_2) # (n1, n2)
# Find areas of each box in both sets
areas_set_1 = (set_1[:, 2] - set_1[:, 0]) * (set_1[:, 3] - set_1[:, 1]) # (n1)
areas_set_2 = (set_2[:, 2] - set_2[:, 0]) * (set_2[:, 3] - set_2[:, 1]) # (n2)
# Find the union
# PyTorch auto-broadcasts singleton dimensions
union = areas_set_1.unsqueeze(1) + areas_set_2.unsqueeze(0) - intersection # (n1, n2)
return intersection / union # (n1, n2)
以上代码位于utils.py脚本的find_intersection和find_jaccard_overlap
笔记:
1.函数find_intersection
find_intersection(set_1, set_2) 是求形状为 (n1,4) 和 (n2,4) 的boxes的交集的面积
set_1[:, :2]的形状为(n1,2), 后面加上.unsqueeze(1),形状变为(n1,1,2)
同理set_2[:, :2].unsqueeze(0) ,形状为(1,n2,2)
(n1,1,2)和(1,n2,2),作了torch.max,有广播存在,(n1,1,2)变成(n1,n2,2) (1,n2,2)也变成(n1,n2,2)
因此得到了形状为(n1,n2,2)的框的左上角坐标 那个2 就是储存了x1,y1
torch.clamp()是将函数限制在最大值和最小值范围内,如果超过就变成那个最大值或者最小值
这里min=0,意思是如果面积小于0,那么面积取0(排除异常)
2.函数find_jaccard_overlap
计算iou,交集/并集
最后union计算, 升维 (n1)->(n1,1) 、 (n2)->(1,n2) 、 接下去相加,广播成(n1,n2),减去一个(n1,n2)的交集面积,得到并集面积
3.1.5 小结
以上便是本小节的全部内容了。
本小节我们首先介绍了目标检测的问题背景,随后分析了一个实现目标检测的解决思路,这也是众多经典检测网络和本章要介绍的模型所采用的思路(即先确立众多候选框,再对候选框进行分类和微调)。最后介绍了bbox和IoU这两个目标检测相关的基本概念。
下一小节,我们将会从数据入手,介绍下目标检测领域最常见的一个数据集VOC,以及数据读取相关的代码。
3.2 目标检测数据集VOC
VOC数据集是目标检测领域最常用的标准数据集之一,几乎所有检测方向的论文,如faster_rcnn、yolo、SSD等都会给出其在VOC数据集上训练并评测的效果。因此我们我们的教程也基于VOC来开展实验,具体地,我们使用VOC2007和VOC2012这两个最流行的版本作为训练和测试的数据。
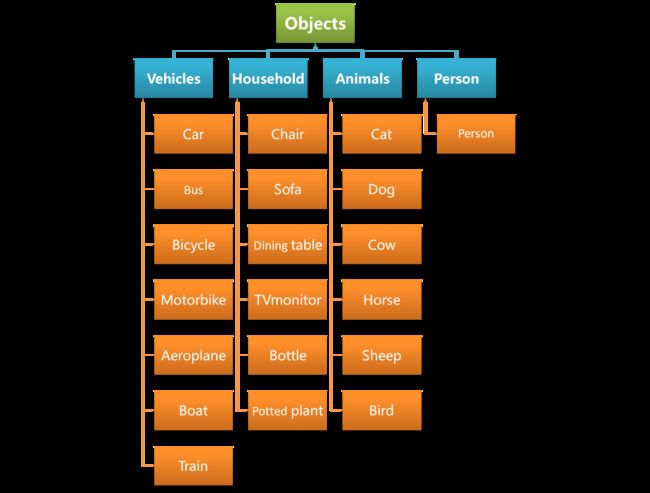
数据集类别
VOC数据集在类别上可以分为4大类,20小类,其类别信息如图3-5所示。
数据集量级
VOC数量集图像和目标数量的基本信息如下图3-6所示:

其中,Images表示图片数量,Objects表示目标数量
数据集下载
VOC官网经常上不去,为确保后续实验准确且顺利的进行,大家可以点击这里的百度云链接进行下载:
VOC百度云下载链接.解压码(7aek)
下载后放到dataset目录下解压即可
下面是通过官网下载的步骤:
1.进入VOC官网链接:http://host.robots.ox.ac.uk/pascal/VOC/.
2.在图3-7所示区域找到历年VOC挑战赛链接,比如选择VOC2012.

3.在VOC2012页面,找到图3-8所示区域,点击下载即可。

4.VOC2007同理进行下载即可
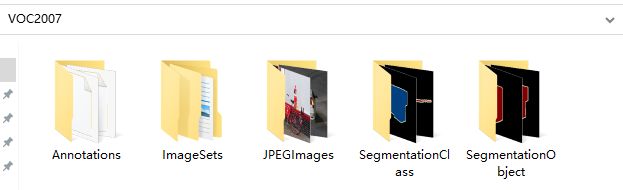
数据集说明
将下载得到的压缩包解压,可以得到如图3-9所示的一系列文件夹,由于VOC数据集不仅被拿来做目标检测,也可以拿来做分割等任务,因此除了目标检测所需的文件之外,还包含分割任务所需的文件,比如SegmentationClass,SegmentationObject,这里,我们主要对目标检测任务涉及到的文件进行介绍。
1.JPEGImages
这个文件夹中存放所有的图片,包括训练验证测试用到的所有图片。
2.ImageSets
这个文件夹中包含三个子文件夹,Layout、Main、Segmentation
Layout文件夹中存放的是train,valid,test和train+valid数据集的文件名
Segmentation文件夹中存放的是分割所用train,valid,test和train+valid数据集的文件名
Main文件夹中存放的是各个类别所在图片的文件名,比如cow_val,表示valid数据集中,包含有cow类别目标的图片名称。
3.Annotations
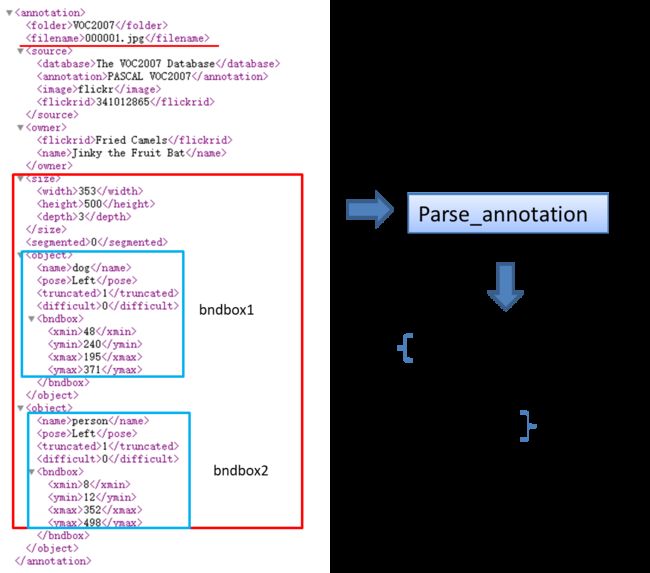
Annotation文件夹中存放着每张图片相关的标注信息,以xml格式的文件存储,可以通过记事本或者浏览器打开,我们以000001.jpg这张图片为例说明标注文件中各个属性的含义,见图3-10。
猛一看去,内容又多又复杂,其实仔细研究一下,只有红框区域内的内容是我们真正需要关注的。
1.filename:图片名称
2.size:图片宽高,
3.depth表示图片通道数
4.object:表示目标,包含下面两部分内容。
首先是目标类别name为dog。pose表示目标姿势为left,truncated表示是否是一个被截断的目标,1表示是,0表示不是,在这个例子中,只露出狗头部分,所以truncated为1。difficult为0表示此目标不是一个难以识别的目标。
然后就是目标的bbox信息,可以看到,这里是以[xmin,ymin,xmax,ymax]格式进行标注的,分别表示dog目标的左上角和右下角坐标。
5.一张图片中有多少需要识别的目标,其xml文件中就有多少个object。上面的例子中有两个object,分别对应人和狗。
3.2.2 VOC数据集的dataloader的构建
1. 数据集准备
根据上面的介绍可以看出,VOC数据集的存储格式还是比较复杂的,为了后面训练中的读取代码更加简洁,这里我们准备了一个预处理脚本create_data_lists.py。
该脚本的作用是进行一系列的数据准备工作,主要是提前将记录标注信息的xml文件(Annotations)进行解析,并将信息整理到json文件之中,这样在运行训练脚本时,只需简单的从json文件中读取已经按想要的格式存储好的标签信息即可。
注: 这样的预处理并不是必须的,和算法或数据集本身均无关系,只是取决于开发者的代码习惯,不同检测框架的处理方法也是不一致的。
可以看到,create_data_lists.py脚本仅有几行代码,其内部调用了utils.py中的create_data_lists方法:
"""python
create_data_lists
"""
from utils import create_data_lists
if __name__ == '__main__':
# voc07_path,voc12_path为我们训练测试所需要用到的数据集,output_folder为我们生成构建dataloader所需文件的路径
# 参数中涉及的路径以个人实际路径为准,建议将数据集放到dataset目录下,和教程保持一致
create_data_lists(voc07_path='../../../dataset/VOCdevkit/VOC2007',
voc12_path='../../../dataset/VOCdevkit/VOC2012',
output_folder='../../../dataset/VOCdevkit')
设置好对应路径后,我们运行数据集准备脚本:
tiny_detector_demo$ python create_data_lists.py
很快啊!dataset/VOCdevkit目录下就生成了若干json文件,这些文件会在后面训练中真正被用到。
不妨手动打开这些json文件,看下都记录了哪些信息。
下面来介绍一下parse_annotation函数内部都做了什么,json中又记录了哪些信息。这部分作为选学,不感兴趣可以跳过,只要你已经明确了json中记录的信息的含义。
代码阅读可以参照注释,建议配图3-11一起食用:
"""python
xml文件解析
"""
import json
import os
import torch
import random
import xml.etree.ElementTree as ET #解析xml文件所用工具
import torchvision.transforms.functional as FT
#GPU设置
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# Label map
#voc_labels为VOC数据集中20类目标的类别名称
voc_labels = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor')
#创建label_map字典,用于存储类别和类别索引之间的映射关系。比如:{1:'aeroplane', 2:'bicycle',......}
label_map = {
k: v + 1 for v, k in enumerate(voc_labels)}
#VOC数据集默认不含有20类目标中的其中一类的图片的类别为background,类别索引设置为0
label_map['background'] = 0
#将映射关系倒过来,{类别名称:类别索引}
rev_label_map = {
v: k for k, v in label_map.items()} # Inverse mapping
#解析xml文件,最终返回这张图片中所有目标的标注框及其类别信息,以及这个目标是否是一个difficult目标
def parse_annotation(annotation_path):
#解析xml
tree = ET.parse(annotation_path)
root = tree.getroot()
boxes = list() #存储bbox
labels = list() #存储bbox对应的label
difficulties = list() #存储bbox对应的difficult信息
#遍历xml文件中所有的object,前面说了,有多少个object就有多少个目标
for object in root.iter('object'):
#提取每个object的difficult、label、bbox信息
difficult = int(object.find('difficult').text == '1')
label = object.find('name').text.lower().strip()
if label not in label_map:
continue
bbox = object.find('bndbox')
xmin = int(bbox.find('xmin').text) - 1
ymin = int(bbox.find('ymin').text) - 1
xmax = int(bbox.find('xmax').text) - 1
ymax = int(bbox.find('ymax').text) - 1
#存储
boxes.append([xmin, ymin, xmax, ymax])
labels.append(label_map[label])
difficulties.append(difficult)
#返回包含图片标注信息的字典
return {
'boxes': boxes, 'labels': labels, 'difficulties': difficulties}
笔记:
1.为什么得到的新坐标减1?
VOC的矩形标注坐标是以1为基准的(1-based),而我们在处理图像坐标都是0起始的(0-based)。
所以在这里才要对从xml文件中读取的xmin,ymin,xmax,ymax 统统减1将坐标变为我们做数据处理时所需要的0-based坐标。
2.这里写一下返回值的形状
boxes (n,4) 的list
label (n) 的list 返回的都是标签对应的数字
difficulties (n)的list,返回的只有0或1
看了上面的代码如果还不太明白,试试结合这张图理解下:
接下来看一下create_data_lists函数在做什么,建议配图3-12一起食用:
"""python
分别读取train和valid的图片和xml信息,创建用于训练和测试的json文件
"""
def create_data_lists(voc07_path, voc12_path, output_folder):
"""
Create lists of images, the bounding boxes and labels of the objects in these images, and save these to file.
:param voc07_path: path to the 'VOC2007' folder
:param voc12_path: path to the 'VOC2012' folder
:param output_folder: folder where the JSONs must be saved
"""
#获取voc2007和voc2012数据集的绝对路径
voc07_path = os.path.abspath(voc07_path)
voc12_path = os.path.abspath(voc12_path)
train_images = list()
train_objects = list()
n_objects = 0
# Training data
for path in [voc07_path, voc12_path]:
# Find IDs of images in training data
#获取训练所用的train和val数据的图片id
with open(os.path.join(path, 'ImageSets/Main/trainval.txt')) as f:
ids = f.read().splitlines()
#根据图片id,解析图片的xml文件,获取标注信息
for id in ids:
# Parse annotation's XML file
objects = parse_annotation(os.path.join(path, 'Annotations', id + '.xml'))
if len(objects['boxes']) == 0: #如果没有目标则跳过
continue
n_objects += len(objects) #统计目标总数
train_objects.append(objects) #存储每张图片的标注信息到列表train_objects
train_images.append(os.path.join(path, 'JPEGImages', id + '.jpg')) #存储每张图片的路径到列表train_images,用于读取图片
assert len(train_objects) == len(train_images) #检查图片数量和标注信息量是否相等,相等才继续执行程序
# Save to file
#将训练数据的图片路径,标注信息,类别映射信息,分别保存为json文件
with open(os.path.join(output_folder, 'TRAIN_images.json'), 'w') as j:
json.dump(train_images, j)
with open(os.path.join(output_folder, 'TRAIN_objects.json'), 'w') as j:
json.dump(train_objects, j)
with open(os.path.join(output_folder, 'label_map.json'), 'w') as j:
json.dump(label_map, j) # save label map too
print('\nThere are %d training images containing a total of %d objects. Files have been saved to %s.' % (
len(train_images), n_objects, os.path.abspath(output_folder)))
#与Train data一样,目的是将测试数据的图片路径,标注信息,类别映射信息,分别保存为json文件,参考上面的注释理解
# Test data
test_images = list()
test_objects = list()
n_objects = 0
# Find IDs of images in the test data
with open(os.path.join(voc07_path, 'ImageSets/Main/test.txt')) as f:
ids = f.read().splitlines()
for id in ids:
# Parse annotation's XML file
objects = parse_annotation(os.path.join(voc07_path, 'Annotations', id + '.xml'))
if len(objects) == 0:
continue
test_objects.append(objects)
n_objects += len(objects)
test_images.append(os.path.join(voc07_path, 'JPEGImages', id + '.jpg'))
assert len(test_objects) == len(test_images)
# Save to file
with open(os.path.join(output_folder, 'TEST_images.json'), 'w') as j:
json.dump(test_images, j)
with open(os.path.join(output_folder, 'TEST_objects.json'), 'w') as j:
json.dump(test_objects, j)
print('\nThere are %d test images containing a total of %d objects. Files have been saved to %s.' % (
len(test_images), n_objects, os.path.abspath(output_folder)))
笔记:
同时加载voc07,voc12两个数据集
ids = f.read().splitlines()是把文件名以列表形式存储
设图片数量为n,每张图片中的object数为m(非固定)
TRAIN_images.json 是列表,长度为n,装着是图片的绝对路径
TRAIN_objects.json 是列表,长度为n,装着n个字典,字典里有键
boxes (m,4) , label (m) , difficulties (m) #括号里都是形状
同样,建议配图食用:

到这里,我们的训练数据就准备好了,接下来开始一步步构建训练所需的dataloader吧!
2.构建dataloader
在这里,我们假设你对Pytorch的 Dataset 和 DataLoader 两个概念有最基本的了解。
如果没有,也不必担心,你可以先阅读一下第2-1节数据读取与数据扩增.,进行简单的了解。
下面开始介绍构建dataloader的相关代码:
首先了解一下训练的时候在哪里定义了dataloader以及是如何定义的。
以下是train.py中的部分代码段:
#train_dataset和train_loader的实例化
train_dataset = PascalVOCDataset(data_folder,
split='train',
keep_difficult=keep_difficult)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True,
collate_fn=train_dataset.collate_fn, num_workers=workers,
pin_memory=True) # note that we're passing the collate function here
可以看到,首先需要实例化PascalVOCDataset类得到train_dataset,然后将train_dataset传入torch.utils.data.DataLoader,进而得到train_loader。
笔记:
pin_memory就是锁页内存,创建DataLoader时,设置pin_memory=True,则意味着生成的Tensor数据最开始是属于内存中的锁页内存,这样将内存的Tensor转义到GPU的显存就会更快一些。显卡不好就不要开了。
collate_fn是如何将(C,H,W)组合成(N,C,H,W)的方式
2.接下来看一下PascalVOCDataset是如何定义的。
代码位于 datasets.py 脚本中,可以看到,PascalVOCDataset继承了torch.utils.data.Dataset,然后重写了__init__ , getitem, len 和 collate_fn 四个方法,这也是我们在构建自己的dataset的时候需要经常做的工作,配合下面注释理解代码:
"""python
PascalVOCDataset具体实现过程
"""
import torch
from torch.utils.data import Dataset
import json
import os
from PIL import Image
from utils import transform
class PascalVOCDataset(Dataset):
"""
A PyTorch Dataset class to be used in a PyTorch DataLoader to create batches.
"""
#初始化相关变量
#读取images和objects标注信息
def __init__(self, data_folder, split, keep_difficult=False):
"""
:param data_folder: folder where data files are stored
:param split: split, one of 'TRAIN' or 'TEST'
:param keep_difficult: keep or discard objects that are considered difficult to detect?
"""
self.split = split.upper() #保证输入为纯大写字母,便于匹配{'TRAIN', 'TEST'}
assert self.split in {
'TRAIN', 'TEST'}
self.data_folder = data_folder
self.keep_difficult = keep_difficult
# Read data files
with open(os.path.join(data_folder, self.split + '_images.json'), 'r') as j:
self.images = json.load(j)
with open(os.path.join(data_folder, self.split + '_objects.json'), 'r') as j:
self.objects = json.load(j)
assert len(self.images) == len(self.objects)
#循环读取image及对应objects
#对读取的image及objects进行tranform操作(数据增广)
#返回PIL格式图像,标注框,标注框对应的类别索引,对应的difficult标志(True or False)
def __getitem__(self, i):
# Read image
#*需要注意,在pytorch中,图像的读取要使用Image.open()读取成PIL格式,不能使用opencv
#*由于Image.open()读取的图片是四通道的(RGBA),因此需要.convert('RGB')转换为RGB通道
image = Image.open(self.images[i], mode='r')
image = image.convert('RGB')
# Read objects in this image (bounding boxes, labels, difficulties)
objects = self.objects[i]
boxes = torch.FloatTensor(objects['boxes']) # (n_objects, 4)
labels = torch.LongTensor(objects['labels']) # (n_objects)
difficulties = torch.ByteTensor(objects['difficulties']) # (n_objects)
# Discard difficult objects, if desired
#如果self.keep_difficult为False,即不保留difficult标志为True的目标
#那么这里将对应的目标删去
if not self.keep_difficult:
boxes = boxes[(1 - difficulties).bool()] #uint8可以作为索引,但是转成bool去索引更好
labels = labels[(1 - difficulties).bool()]
difficulties = difficulties[(1 - difficulties).bool()]
# Apply transformations
#对读取的图片应用transform
image, boxes, labels, difficulties = transform(image, boxes, labels, difficulties, split=self.split)
return image, boxes, labels, difficulties
#获取图片的总数,用于计算batch数
def __len__(self):
return len(self.images)
#我们知道,我们输入到网络中训练的数据通常是一个batch一起输入,而通过__getitem__我们只读取了一张图片及其objects信息
#如何将读取的一张张图片及其object信息整合成batch的形式呢?
#collate_fn就是做这个事情,
#对于一个batch的images,collate_fn通过torch.stack()将其整合成4维tensor,对应的objects信息分别用一个list存储
def collate_fn(self, batch):
"""
Since each image may have a different number of objects, we need a collate function (to be passed to the DataLoader).
This describes how to combine these tensors of different sizes. We use lists.
Note: this need not be defined in this Class, can be standalone.
:param batch: an iterable of N sets from __getitem__()
:return: a tensor of images, lists of varying-size tensors of bounding boxes, labels, and difficulties
"""
images = list()
boxes = list()
labels = list()
difficulties = list()
for b in batch:
images.append(b[0])
boxes.append(b[1])
labels.append(b[2])
difficulties.append(b[3])
#(3,224,224) -> (N,3,224,224)
images = torch.stack(images, dim=0)
return images, boxes, labels, difficulties # tensor (N, 3, 224, 224), 3 lists of N tensors each
笔记:
difficulties = torch.ByteTensor(objects[‘difficulties’])是将difficulties数据类型定义成uint8
和bool一样,可以对tensor进行索引
1 - difficulties也是unit8索引,对boxes索引,比如keep_difficult=False,我们就可以利用索引把非difficulties的boxes索引出来得到了(m,4)的boxes。
来看看__getitem__返回的数据
images (C,H,W) 标准化为N(0,1)的标准正态分布,类型为FloatTensor
boxes (m,4) 它也归一化到0~1之间, 类型为FloatTensor
label (m) 还是一堆数字,作为类别,类型为LongTensor
difficult(m) 还是0或1, 类型为torch.uint8
collate_fn中
images = torch.stack(images, dim=0)最外层是列表,长度为N(batch_size),里面是(C,H,W)的tensor
因此用torch.stack()在维度0,变成tensor, 因此变成(N,C,H,W)的tensor
3.关于数据增强
到这里为止,我们的dataset就算是构建好了,已经可以传给torch.utils.data.DataLoader来获得用于输入网络训练的数据了。
但是不急,构建dataset中有个很重要的一步我们上面只是提及了一下,那就是transform操作(数据增强)。
也就是这一行代码
image, boxes, labels, difficulties = transform(image, boxes, labels, difficulties, split=self.split)
这部分比较重要,但是涉及代码稍多,对于基础较薄弱的伙伴可以作为选学内容,后面再认真读代码。你只需知道,同分类网络一样,训练目标检测网络同样需要进行数据增强,这对提升网络精度和泛化能力很有帮助。
需要注意的是,涉及位置变化的数据增强方法,同样需要对目标框进行一致的处理,因此目标检测框架的数据处理这部分的代码量通常都不小,且比较容易出bug。这里为了降低代码的难度,我们只是使用了几种比较简单的数据增强。
transform 函数的具体代码实现位于 utils.py 中,下面简单进行讲解:
"""python
transform操作是训练模型中一项非常重要的工作,其中不仅包含数据增强以提升模型性能的相关操作,也包含如数据类型转换(PIL to Tensor)、归一化(Normalize)这些必要操作。
"""
import json
import os
import torch
import random
import xml.etree.ElementTree as ET
import torchvision.transforms.functional as FT
"""
可以看到,transform分为TRAIN和TEST两种模式,以本实验为例:
在TRAIN时进行的transform有:
1.以随机顺序改变图片亮度,对比度,饱和度和色相,每种都有50%的概率被执行。photometric_distort
2.扩大目标,expand
3.随机裁剪图片,random_crop
4.0.5的概率进行图片翻转,flip
*注意:a. 第一种transform属于像素级别的图像增强,目标相对于图片的位置没有改变,因此bbox坐标不需要变化。
但是2,3,4,5都属于图片的几何变化,目标相对于图片的位置被改变,因此bbox坐标要进行相应变化。
在TRAIN和TEST时都要进行的transform有:
1.统一图像大小到(224,224),resize
2.PIL to Tensor
3.归一化,FT.normalize()
注1: resize也是一种几何变化,要知道应用数据增强策略时,哪些属于几何变化,哪些属于像素变化
注2: PIL to Tensor操作,normalize操作必须执行
"""
def transform(image, boxes, labels, difficulties, split):
"""
Apply the transformations above.
:param image: image, a PIL Image
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:param labels: labels of objects, a tensor of dimensions (n_objects)
:param difficulties: difficulties of detection of these objects, a tensor of dimensions (n_objects)
:param split: one of 'TRAIN' or 'TEST', since different sets of transformations are applied
:return: transformed image, transformed bounding box coordinates, transformed labels, transformed difficulties
"""
#在训练和测试时使用的transform策略往往不完全相同,所以需要split变量指明是TRAIN还是TEST时的transform方法
assert split in {
'TRAIN', 'TEST'}
# Mean and standard deviation of ImageNet data that our base VGG from torchvision was trained on
# see: https://pytorch.org/docs/stable/torchvision/models.html
#为了防止由于图片之间像素差异过大而导致的训练不稳定问题,图片在送入网络训练之间需要进行归一化
#对所有图片各通道求mean和std来获得
mean = [0.485, 0.456, 0.406]
std = [0.229, 0.224, 0.225]
new_image = image
new_boxes = boxes
new_labels = labels
new_difficulties = difficulties
# Skip the following operations for evaluation/testing
if split == 'TRAIN':
# A series of photometric distortions in random order, each with 50% chance of occurrence, as in Caffe repo
new_image = photometric_distort(new_image)
# Convert PIL image to Torch tensor
new_image = FT.to_tensor(new_image)
# Expand image (zoom out) with a 50% chance - helpful for training detection of small objects
# Fill surrounding space with the mean of ImageNet data that our base VGG was trained on
if random.random() < 0.5:
new_image, new_boxes = expand(new_image, boxes, filler=mean)
# Randomly crop image (zoom in)
new_image, new_boxes, new_labels, new_difficulties = random_crop(new_image, new_boxes, new_labels,
new_difficulties)
# Convert Torch tensor to PIL image
new_image = FT.to_pil_image(new_image)
# Flip image with a 50% chance
if random.random() < 0.5:
new_image, new_boxes = flip(new_image, new_boxes)
# Resize image to (224, 224) - this also converts absolute boundary coordinates to their fractional form
new_image, new_boxes = resize(new_image, new_boxes, dims=(224, 224))
# Convert PIL image to Torch tensor
new_image = FT.to_tensor(new_image)
# Normalize by mean and standard deviation of ImageNet data that our base VGG was trained on
new_image = FT.normalize(new_image, mean=mean, std=std)
return new_image, new_boxes, new_labels, new_difficulties
笔记:
TRAIN transform的步骤:
颜色变化–>to_tensor(变形(CHW),归一化,pil变tensor)–>创建一个背景并把图放上去(等效缩小图片)–>随机裁剪图片(丢失了部分框)->转为pil->随机左右翻转->resize(这里面对boxes做了归一化处理)->再变tensor->标准化处理
还对每个transform里的函数作了解释,详见最后
4.最后,构建DataLoade
至此,我们已经将VOC数据转换成了dataset,接下来可以用来创建dataloader,这部分pytorch已经帮我们实现好了,我们只需将创建好的dataset送入即可,注意理解相关参数。
"""python
DataLoader
"""
#参数说明:
#在train时一般设置shufle=True打乱数据顺序,增强模型的鲁棒性
#num_worker表示读取数据时的线程数,一般根据自己设备配置确定(如果是windows系统,建议设默认值0,防止出错)
#pin_memory,在计算机内存充足的时候设置为True可以加快内存中的tensor转换到GPU的速度,具体原因可以百度哈~
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True,
collate_fn=train_dataset.collate_fn, num_workers=workers,
pin_memory=True) # note that we're passing the collate function here
3.2.3 小结
到这里,这一小节的内容就介绍完了。
回顾下,本节中,我们首先介绍了VOC数据集的基本信息以及如何下载,随后我们介绍了和读取VOC数据集的相关代码。
万事俱备,只欠模型~
对transform内函数解释
def photometric_distort(image):
"""
Distort brightness, contrast, saturation, and hue, each with a 50% chance, in random order.
:param image: image, a PIL Image
:return: distorted image
"""
new_image = image
distortions = [FT.adjust_brightness,
FT.adjust_contrast,
FT.adjust_saturation,
FT.adjust_hue]
random.shuffle(distortions)
for d in distortions:
if random.random() < 0.5:
if d.__name__ is 'adjust_hue':
# Caffe repo uses a 'hue_delta' of 18 - we divide by 255 because PyTorch needs a normalized value
adjust_factor = random.uniform(-18 / 255., 18 / 255.)
else:
# Caffe repo uses 'lower' and 'upper' values of 0.5 and 1.5 for brightness, contrast, and saturation
adjust_factor = random.uniform(0.5, 1.5)
# Apply this distortion
new_image = d(new_image, adjust_factor)
return new_image
笔记:
函数名的__name__就是函数名本身
进行亮度,对比度,饱和度,色度变换,每个操作被执行的概率为1/2
def expand(image, boxes, filler):
"""
Perform a zooming out operation by placing the image in a larger canvas of filler material.
Helps to learn to detect smaller objects.
:param image: image, a tensor of dimensions (3, original_h, original_w)
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:param filler: RBG values of the filler material, a list like [R, G, B]
:return: expanded image, updated bounding box coordinates
"""
# Calculate dimensions of proposed expanded (zoomed-out) image
#形成一张以均值作为背景的1~4倍大小的图,然后把原图贴在上面
original_h = image.size(1)
original_w = image.size(2)
max_scale = 4
scale = random.uniform(1, max_scale)
new_h = int(scale * original_h)
new_w = int(scale * original_w)
# Create such an image with the filler
filler = torch.FloatTensor(filler) # (3) #filter传入的是mean形状为(3),分别是每个通道的均值
#torch.one定义背景图(3, new_h, new_w) 后面的filter从(3),升维到(3,1,1)后才可以自动广播,到(3, new_h, new_w),这样子背景图中
#每个通道在new_h, new_w,都是一个值
new_image = torch.ones((3, new_h, new_w), dtype=torch.float) * filler.unsqueeze(1).unsqueeze(1) # (3, new_h, new_w)
# Note - do not use expand() like new_image = filler.unsqueeze(1).unsqueeze(1).expand(3, new_h, new_w)
# because all expanded values will share the same memory, so changing one pixel will change all
# Place the original image at random coordinates in this new image (origin at top-left of image)
left = random.randint(0, new_w - original_w)
right = left + original_w
top = random.randint(0, new_h - original_h)
bottom = top + original_h
new_image[:, top:bottom, left:right] = image
# Adjust bounding boxes' coordinates accordingly #原来boxesw为(n,4),现在加了一波偏移量,就是新的框了(n,4)
new_boxes = boxes + torch.FloatTensor([left, top, left, top]).unsqueeze(
0) # (n_objects, 4), n_objects is the no. of objects in this image
return new_image, new_boxes
笔记:
创建比原图大的背景图,把原图贴上去,然后再从新图上抠下来,包含原图和新图的一些背景图,这样的话,目标会变小,对检测小的物体泛化性提升
def random_crop(image, boxes, labels, difficulties):
"""
Performs a random crop in the manner stated in the paper. Helps to learn to detect larger and partial objects.
Note that some objects may be cut out entirely.
Adapted from https://github.com/amdegroot/ssd.pytorch/blob/master/utils/augmentations.py
:param image: image, a tensor of dimensions (3, original_h, original_w)
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:param labels: labels of objects, a tensor of dimensions (n_objects)
:param difficulties: difficulties of detection of these objects, a tensor of dimensions (n_objects)
:return: cropped image, updated bounding box coordinates, updated labels, updated difficulties
"""
original_h = image.size(1)
original_w = image.size(2)
# Keep choosing a minimum overlap until a successful crop is made
while True:
# Randomly draw the value for minimum overlap
min_overlap = random.choice([0., .1, .3, .5, .7, .9, None]) # 'None' refers to no cropping
# If not cropping
if min_overlap is None:
return image, boxes, labels, difficulties
# Try up to 50 times for this choice of minimum overlap
# This isn't mentioned in the paper, of course, but 50 is chosen in paper authors' original Caffe repo
max_trials = 50
for _ in range(max_trials):
# Crop dimensions must be in [0.3, 1] of original dimensions
# Note - it's [0.1, 1] in the paper, but actually [0.3, 1] in the authors' repo
min_scale = 0.3
scale_h = random.uniform(min_scale, 1)
scale_w = random.uniform(min_scale, 1)
new_h = int(scale_h * original_h) #每次都在原图基础上,放缩,,最多可以尝试50次
new_w = int(scale_w * original_w)
# Aspect ratio has to be in [0.5, 2]
aspect_ratio = new_h / new_w
if not 0.5 < aspect_ratio < 2:
continue
# Crop coordinates (origin at top-left of image)
left = random.randint(0, original_w - new_w)
right = left + new_w
top = random.randint(0, original_h - new_h)
bottom = top + new_h
crop = torch.FloatTensor([left, top, right, bottom]) # (4)
# Calculate Jaccard overlap between the crop and the bounding boxes
overlap = find_jaccard_overlap(crop.unsqueeze(0),
boxes) # (1, n_objects), n_objects is the no. of objects in this image
overlap = overlap.squeeze(0) # (n_objects)
# If not a single bounding box has a Jaccard overlap of greater than the minimum, try again
if overlap.max().item() < min_overlap:
continue
# Crop image
new_image = image[:, top:bottom, left:right] # (3, new_h, new_w)
# Find centers of original bounding boxes
bb_centers = (boxes[:, :2] + boxes[:, 2:]) / 2. # (n_objects, 2)
# Find bounding boxes whose centers are in the crop #tensor类型的布尔值,可以作乘法运算
centers_in_crop = (bb_centers[:, 0] > left) * (bb_centers[:, 0] < right) * (bb_centers[:, 1] > top) * (
bb_centers[:, 1] < bottom) # (n_objects), a Torch uInt8/Byte tensor, can be used as a boolean index
# If not a single bounding box has its center in the crop, try again
if not centers_in_crop.any(): #tensor.any() 如果有一个为True,那么就返回True
continue
# Discard bounding boxes that don't meet this criterion
new_boxes = boxes[centers_in_crop, :]
new_labels = labels[centers_in_crop]
new_difficulties = difficulties[centers_in_crop]
# Calculate bounding boxes' new coordinates in the crop
#如果目标框在新截的框外(左上角),左上角的点就是(0,0)
new_boxes[:, :2] = torch.max(new_boxes[:, :2], crop[:2]) # crop[:2] is [left, top]
new_boxes[:, :2] -= crop[:2]
new_boxes[:, 2:] = torch.min(new_boxes[:, 2:], crop[2:]) # crop[2:] is [right, bottom]
new_boxes[:, 2:] -= crop[:2] #注意减去的是(x1,y1)而不是(x2,y2)
return new_image, new_boxes, new_labels, new_difficulties
笔记:
目的是进行抠图,获得较大的目标图,这样提高检测大物体的泛化能力
抠的图大小为0.3~1
iou 0,0.1,0.3,0.5,0.7,0.9,None里面选一个
只要有一个crop的图与boxes的iou任意一个>最小iou,就把它crop保留
然后判断crop的图里有无boxes的框(中心点判断)
只要留下>=1的boxes就会结束(注意boxes(n,4),如果只输出一个box(4),必须要升维成(1,4))
但是boxes可能会减少,因此label,difficult也做出相应的减少
def flip(image, boxes):
"""
Flip image horizontally.
:param image: image, a PIL Image
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:return: flipped image, updated bounding box coordinates
"""
# Flip image
new_image = FT.hflip(image)
# Flip boxes
new_boxes = boxes
new_boxes[:, 0] = image.width - boxes[:, 0] - 1 #比如宽度是100,像素是0到99,那么第一个像素0, 100-0-1=99,这样完成了左右翻转,对x1
new_boxes[:, 2] = image.width - boxes[:, 2] - 1 #对坐标x2也完成了翻转
new_boxes = new_boxes[:, [2, 1, 0, 3]] #
return new_image, new_boxes
笔记:
目的:左右翻转
为什么减1?
#比如x1在左上角,图宽度是100,像素是0到99,那么第一个像素0, 100-0-1=99,这样完成了对x1左右翻转,

然后(x2,y1)、(x1,y2)变成后续输出的(x1,y1),(x2,y2)
def resize(image, boxes, dims=(300, 300), return_percent_coords=True):
"""
Resize image.
For the SSD300, resize to (300, 300).
For our demo, resize to (224, 224).
Since percent/fractional coordinates are calculated for the bounding boxes (w.r.t image dimensions) in this process,
you may choose to retain them.
:param image: image, a PIL Image
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:return: resized image, updated bounding box coordinates (or fractional coordinates, in which case they remain the same)
"""
# Resize image
new_image = FT.resize(image, dims)
# Resize bounding boxes
old_dims = torch.FloatTensor([image.width, image.height, image.width, image.height]).unsqueeze(0)
new_boxes = boxes / old_dims # percent coordinates
if not return_percent_coords:
new_dims = torch.FloatTensor([dims[1], dims[0], dims[1], dims[0]]).unsqueeze(0)
new_boxes = new_boxes * new_dims
return new_image, new_boxes
笔记:
这里对图形resize同时
还作了对boxes的归一化