基于HRNet-Segmentation的遥感图像语义分割
HRNet网络结构
HRNet的设计思路延续了一路保持较大分辨率特征图的方法,在网络前进的过程中,都**保持较大的特征图**,但是在网路前进过程中,也会**平行地**做一些下采样缩小特征图,如此**迭代**下去。最后生成**多组有不同分辨率的特征图**,**再融合**这些特征图做Segmentation map的预测。
### 主干网络结构
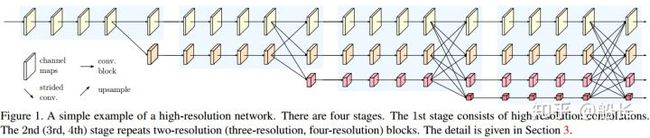
上图是HRNet简单地示意图,生成多种不同分辨率的特征。这里需要注意的细节是,它在网络的前,中,后三段都做了特征融合,而不是仅仅在最后的特征图上做融合。别的好像也没什么了,结构和思路都比较简单,没有[前面的RefineNet](https://github.com/Captain1986/CaptainBlackboard/blob/master/D%230041-用RefineNet做分割/D%230041.md)那么复杂,就不多做介绍了。
### 多分辨率融合Multi-resolution Fusion
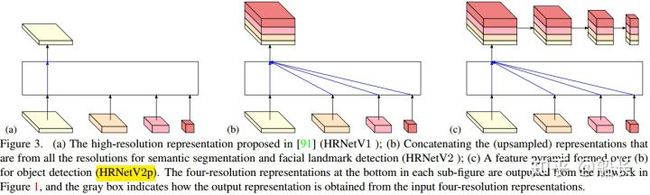
HRNet作为主干网络提取了特征,这些特征有不同的分辨率,需要根据不同的任务来选择融合的方式。
如果做语义分割或者人脸特征点定位,那么就是如上图b中所示,把不同分辨率的特征通过upsample操作后得到一致的大分辨率特征图,然后concate起来做融合。整体思路很简单,不在阐述:
HRNet网络结构keras代码:源码:https://github.com/niecongchong/HRNet-keras-semantic-segmentation 或者 https://github.com/soyan1999/segmentation_hrnet_keras
import keras.backend as K
from keras.models import Model
from keras.layers import Input, Conv2D, BatchNormalization, Activation
from keras.layers import UpSampling2D, add, concatenate
from loss import *
from keras.optimizers import Adam,Nadam
def conv3x3(x, out_filters, strides=(1, 1)):
x = Conv2D(out_filters, 3, padding='same', strides=strides, use_bias=False, kernel_initializer='he_normal')(x)
return x
def basic_Block(input, out_filters, strides=(1, 1), with_conv_shortcut=False):
x = conv3x3(input, out_filters, strides)
x = BatchNormalization(axis=3)(x)
x = Activation('relu')(x)
x = conv3x3(x, out_filters)
x = BatchNormalization(axis=3)(x)
if with_conv_shortcut:
residual = Conv2D(out_filters, 1, strides=strides, use_bias=False, kernel_initializer='he_normal')(input)
residual = BatchNormalization(axis=3)(residual)
x = add([x, residual])
else:
x = add([x, input])
x = Activation('relu')(x)
return x
def bottleneck_Block(input, out_filters, strides=(1, 1), with_conv_shortcut=False):
expansion = 4
de_filters = int(out_filters / expansion)
x = Conv2D(de_filters, 1, use_bias=False, kernel_initializer='he_normal')(input)
x = BatchNormalization(axis=3)(x)
x = Activation('relu')(x)
x = Conv2D(de_filters, 3, strides=strides, padding='same', use_bias=False, kernel_initializer='he_normal')(x)
x = BatchNormalization(axis=3)(x)
x = Activation('relu')(x)
x = Conv2D(out_filters, 1, use_bias=False, kernel_initializer='he_normal')(x)
x = BatchNormalization(axis=3)(x)
if with_conv_shortcut:
residual = Conv2D(out_filters, 1, strides=strides, use_bias=False, kernel_initializer='he_normal')(input)
residual = BatchNormalization(axis=3)(residual)
x = add([x, residual])
else:
x = add([x, input])
x = Activation('relu')(x)
return x
def stem_net(input):
x = Conv2D(64, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(input)
x = BatchNormalization(axis=3)(x)
x = Activation('relu')(x)
# x = Conv2D(64, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x)
# x = BatchNormalization(axis=3)(x)
# x = Activation('relu')(x)
x = bottleneck_Block(x, 256, with_conv_shortcut=True)
x = bottleneck_Block(x, 256, with_conv_shortcut=False)
x = bottleneck_Block(x, 256, with_conv_shortcut=False)
x = bottleneck_Block(x, 256, with_conv_shortcut=False)
return x
def transition_layer1(x, out_filters_list=[32, 64]):
x0 = Conv2D(out_filters_list[0], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x)
x0 = BatchNormalization(axis=3)(x0)
x0 = Activation('relu')(x0)
x1 = Conv2D(out_filters_list[1], 3, strides=(2, 2),
padding='same', use_bias=False, kernel_initializer='he_normal')(x)
x1 = BatchNormalization(axis=3)(x1)
x1 = Activation('relu')(x1)
return [x0, x1]
def make_branch1_0(x, out_filters=32):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch1_1(x, out_filters=64):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def fuse_layer1(x):
x0_0 = x[0]
x0_1 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[1])
x0_1 = BatchNormalization(axis=3)(x0_1)
x0_1 = UpSampling2D(size=(2, 2))(x0_1)
x0 = add([x0_0, x0_1])
x1_0 = Conv2D(64, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x[0])
x1_0 = BatchNormalization(axis=3)(x1_0)
x1_1 = x[1]
x1 = add([x1_0, x1_1])
return [x0, x1]
def transition_layer2(x, out_filters_list=[32, 64, 128]):
x0 = Conv2D(out_filters_list[0], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x[0])
x0 = BatchNormalization(axis=3)(x0)
x0 = Activation('relu')(x0)
x1 = Conv2D(out_filters_list[1], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x[1])
x1 = BatchNormalization(axis=3)(x1)
x1 = Activation('relu')(x1)
x2 = Conv2D(out_filters_list[2], 3, strides=(2, 2),
padding='same', use_bias=False, kernel_initializer='he_normal')(x[1])
x2 = BatchNormalization(axis=3)(x2)
x2 = Activation('relu')(x2)
return [x0, x1, x2]
def make_branch2_0(x, out_filters=32):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch2_1(x, out_filters=64):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch2_2(x, out_filters=128):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def fuse_layer2(x):
x0_0 = x[0]
x0_1 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[1])
x0_1 = BatchNormalization(axis=3)(x0_1)
x0_1 = UpSampling2D(size=(2, 2))(x0_1)
x0_2 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[2])
x0_2 = BatchNormalization(axis=3)(x0_2)
x0_2 = UpSampling2D(size=(4, 4))(x0_2)
x0 = add([x0_0, x0_1, x0_2])
x1_0 = Conv2D(64, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x[0])
x1_0 = BatchNormalization(axis=3)(x1_0)
x1_1 = x[1]
x1_2 = Conv2D(64, 1, use_bias=False, kernel_initializer='he_normal')(x[2])
x1_2 = BatchNormalization(axis=3)(x1_2)
x1_2 = UpSampling2D(size=(2, 2))(x1_2)
x1 = add([x1_0, x1_1, x1_2])
x2_0 = Conv2D(32, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x[0])
x2_0 = BatchNormalization(axis=3)(x2_0)
x2_0 = Activation('relu')(x2_0)
x2_0 = Conv2D(128, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x2_0)
x2_0 = BatchNormalization(axis=3)(x2_0)
x2_1 = Conv2D(128, 3, strides=(2, 2), padding='same', use_bias=False, kernel_initializer='he_normal')(x[1])
x2_1 = BatchNormalization(axis=3)(x2_1)
x2_2 = x[2]
x2 = add([x2_0, x2_1, x2_2])
return [x0, x1, x2]
def transition_layer3(x, out_filters_list=[32, 64, 128, 256]):
x0 = Conv2D(out_filters_list[0], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x[0])
x0 = BatchNormalization(axis=3)(x0)
x0 = Activation('relu')(x0)
x1 = Conv2D(out_filters_list[1], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x[1])
x1 = BatchNormalization(axis=3)(x1)
x1 = Activation('relu')(x1)
x2 = Conv2D(out_filters_list[2], 3, padding='same', use_bias=False, kernel_initializer='he_normal')(x[2])
x2 = BatchNormalization(axis=3)(x2)
x2 = Activation('relu')(x2)
x3 = Conv2D(out_filters_list[3], 3, strides=(2, 2),
padding='same', use_bias=False, kernel_initializer='he_normal')(x[2])
x3 = BatchNormalization(axis=3)(x3)
x3 = Activation('relu')(x3)
return [x0, x1, x2, x3]
def make_branch3_0(x, out_filters=32):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch3_1(x, out_filters=64):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch3_2(x, out_filters=128):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def make_branch3_3(x, out_filters=256):
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
x = basic_Block(x, out_filters, with_conv_shortcut=False)
return x
def fuse_layer3(x):
x0_0 = x[0]
x0_1 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[1])
x0_1 = BatchNormalization(axis=3)(x0_1)
x0_1 = UpSampling2D(size=(2, 2))(x0_1)
x0_2 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[2])
x0_2 = BatchNormalization(axis=3)(x0_2)
x0_2 = UpSampling2D(size=(4, 4))(x0_2)
x0_3 = Conv2D(32, 1, use_bias=False, kernel_initializer='he_normal')(x[3])
x0_3 = BatchNormalization(axis=3)(x0_3)
x0_3 = UpSampling2D(size=(8, 8))(x0_3)
x0 = concatenate([x0_0, x0_1, x0_2, x0_3], axis=-1)
return x0
def final_layer(x, classes=1):
x = UpSampling2D(size=(2, 2))(x)
x = Conv2D(classes, 1, use_bias=False, kernel_initializer='he_normal')(x)
x = BatchNormalization(axis=3)(x)
x = Activation('softmax', name='Classification')(x)
return x
def seg_hrnet(height=320, width=320, channel=3, classes=5):
# inputs = Input(batch_shape=(batch_size,) + (height, width, channel))
inputs = Input(shape=(height, width, channel))
x = stem_net(inputs)
x = transition_layer1(x)
x0 = make_branch1_0(x[0])
x1 = make_branch1_1(x[1])
x = fuse_layer1([x0, x1])
x = transition_layer2(x)
x0 = make_branch2_0(x[0])
x1 = make_branch2_1(x[1])
x2 = make_branch2_2(x[2])
x = fuse_layer2([x0, x1, x2])
x = transition_layer3(x)
x0 = make_branch3_0(x[0])
x1 = make_branch3_1(x[1])
x2 = make_branch3_2(x[2])
x3 = make_branch3_3(x[3])
x = fuse_layer3([x0, x1, x2, x3])
out = final_layer(x, classes=classes)
model = Model(inputs=inputs, outputs=out)
adam=Adam(lr=1e-4, beta_1=0.9, beta_2=0.999, epsilon=1e-08)
model.compile(optimizer = Nadam(lr = 1e-4), loss = dices,metrics=['accuracy',precision,fbeta_score,fmeasure,IoU,recall])
return model
# from keras.utils import plot_model
# import os
# os.environ["PATH"] += os.pathsep + 'C:/Program Files (x86)/Graphviz2.38/bin/'
#
# model = seg_hrnet(batch_size=2, height=512, width=512, channel=3, classes=1)
# model.summary()
# plot_model(model, to_file='seg_hrnet.png', show_shapes=True)
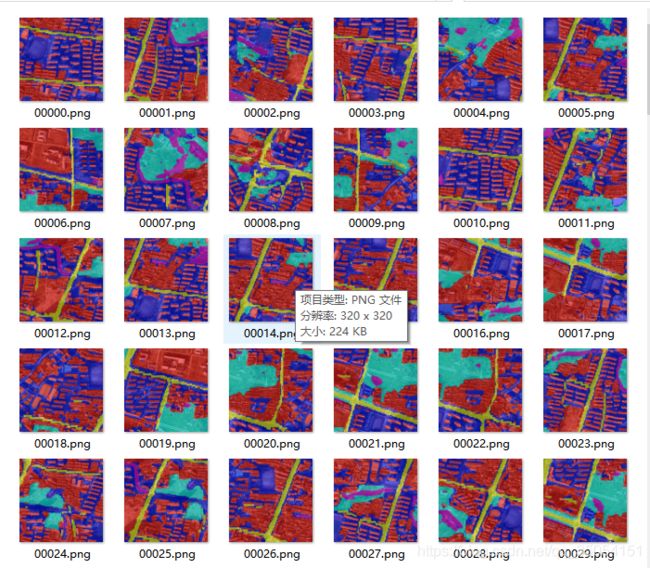
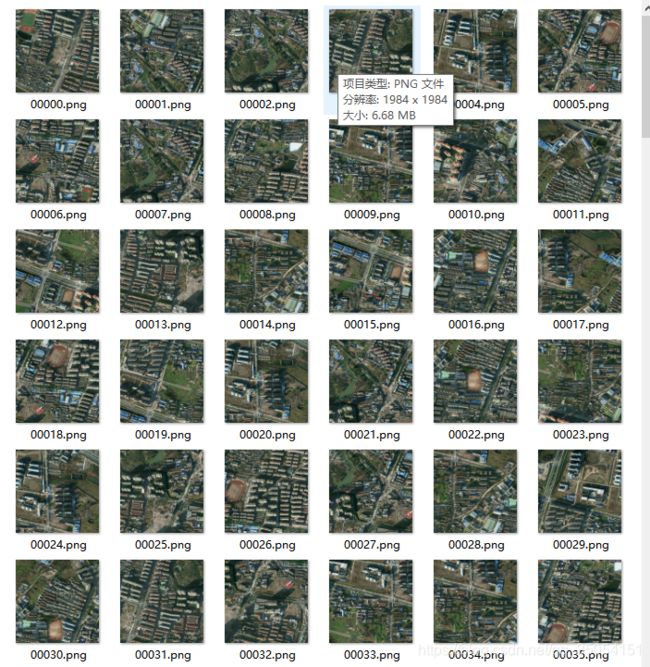
训练数据切分到320*320大小:

预测效果整体正常,只是loss没有继续收敛,如果loss继续收敛下降的话
应该会有不错的效果: