莫烦pytorch学习笔记3
莫烦pytorch学习笔记3
- 1.批次训练
- 2.优化器
1.批次训练
我们之前的代码中都是将所有的数据一起feed到神经网络中进行训练,但是当数据量比较大的时候,效率就会下下降,这个时候就需要批训练,分批把数据feed到网络中,这样会提高效率。
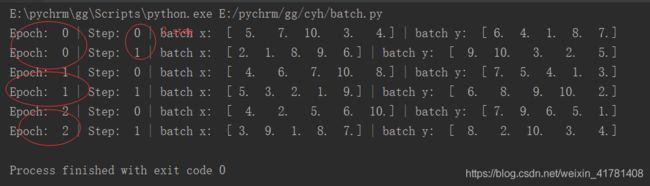
如果训练样本有 10 batch_size=5 每个epoch 需要进行10/5=2 step
import torch
import torch.utils.data as Data
torch.manual_seed(1) # reproducible
BATCH_SIZE = 5
x=torch.linspace(1,10,15)
y=torch.linspace(10,1,15)
torch_dataset = Data.TensorDataset(x,y)
loader = Data.DataLoader(
dataset=torch_dataset, # torch TensorDataset format
batch_size=BATCH_SIZE, # mini batch size
shuffle=True, # random shuffle for training 打乱
# num_workers=2, # subprocesses for loading data
)
for epoch in range(3): # train entire dataset 3 times
for step, (batch_x, batch_y) in enumerate(loader): # for each training step
# train your data...
print('Epoch: ', epoch, '| Step: ', step, '| batch x: ',
batch_x.numpy(), '| batch y: ', batch_y.numpy())
shuffle=False

2.优化器
参考:https://blog.csdn.net/weixin_40170902/article/details/80092628






import torch
import torch.utils.data as Data
import torch.nn.functional as F
from torch.autograd import Variable
import matplotlib.pyplot as plt
torch.manual_seed(1) # reproducible
LR = 0.01
BATCH_SIZE = 32
EPOCH = 12
# fake dataset
x = torch.unsqueeze(torch.linspace(-1, 1, 1000), dim=1)
print(type(x))
y = x.pow(2) + 0.1*torch.normal(torch.zeros(*x.size()))
# plot dataset
plt.scatter(x.numpy(), y.numpy())
plt.show()
torch_dataset = Data.TensorDataset(x,y)
loader = Data.DataLoader(
dataset=torch_dataset,
batch_size=BATCH_SIZE,
shuffle=True,)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.hidden = torch.nn.Linear(1, 20) # hidden layer
self.predict = torch.nn.Linear(20, 1) # output layer
def forward(self, x):
x = F.relu(self.hidden(x)) # activation function for hidden layer
x = self.predict(x) # linear output
return x
net_SGD= Net()
net_Momentum= Net()
net_RMSprop= Net()
net_Adam= Net()
nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam]
opt_SGD = torch.optim.SGD(net_SGD.parameters(), lr=LR)
opt_Momentum = torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8)
opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9)
opt_Adam = torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9, 0.99))
optimizers = [opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam]
loss_func = torch.nn.MSELoss()
losses_his = [[], [], [], []] # record loss
# training
for epoch in range(EPOCH):
print('Epoch: ', epoch)
for step, (batch_x, batch_y) in enumerate(loader): # for each training step
b_x = Variable(batch_x)
b_y = Variable(batch_y)
for net, opt, l_his in zip(nets, optimizers, losses_his):
output = net(b_x) # get output for every net
loss = loss_func(output, b_y) # compute loss for every net
opt.zero_grad() # clear gradients for next train
loss.backward() # backpropagation, compute gradients
opt.step() # apply gradients
l_his.append(loss.item()) # loss recoder
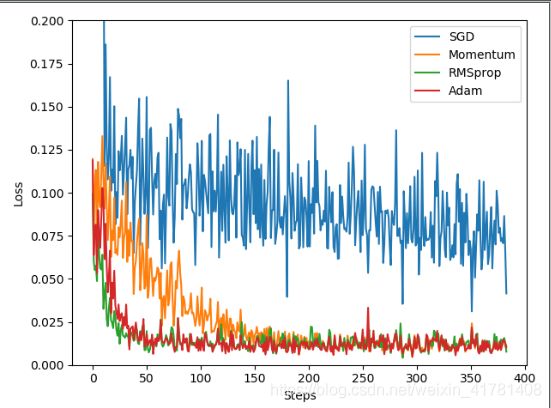
labels = ['SGD', 'Momentum', 'RMSprop', 'Adam']
for i, l_his in enumerate(losses_his):
plt.plot(l_his, label=labels[i])
plt.legend(loc='best')
plt.xlabel('Steps')
plt.ylabel('Loss')
plt.ylim((0, 0.2))
plt.show()