机器人定位 - 蒙特卡罗定位(直方滤波算法)
wiki上的介绍 https://en.wikipedia.org/wiki/Monte_Carlo_localization
Udacity上的课程 https://cn.udacity.com/course/artificial-intelligence-for-robotics–cs373/
下面的例子来自优达学城
原理
假设一个机器人在一个一维的世界里,具体假设场景[R,R,G,R,R]。其中R代表红色,G代表绿色。
机器人有一个全局的分布表。
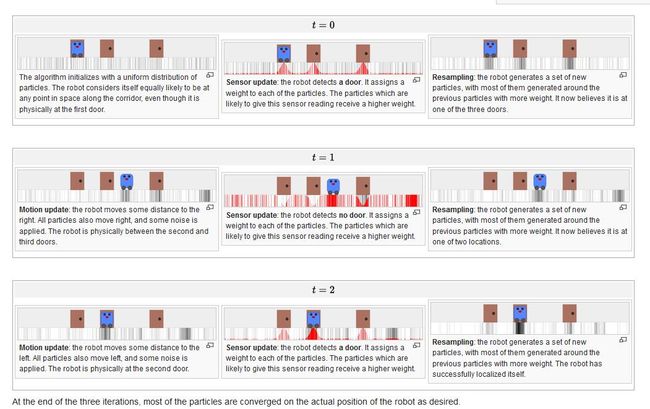
1.首先机器人为所有特征点给一个平均概率,代表最混乱的情况。
- 1/5 = 0.2, 所以机器人现在全局表是[0.2, 0.2, 0.2, 0.2, 0,2],代表机器人有0.2的概率处在对应的位置。
2.当机器人感知到对应特征的时候,会添加一个滤波器
- 机器人每感知到一个特征就会为所有的位置添加一个滤波器
- 例如 p=0.8, (1-p)=0.2,滤波器自己定义
原始状态是[0.2, 0.2, 0.2, 0.2, 0.2],当感知到R特征的时候,就为所有R的位置添加0.8的滤波器. 0.2*0.8 = 0.16, 0.2 * 0.2 = 0.04 - 然后进行归一化的处理。这里涉及到贝叶斯公式的原理。
- 最后的结果大家自己算吧。
3.然后机器人向前移动
因为机器人很难确定自己具体行进过程,所以当机器人前进的时候,需要进行卷积运算。
- 例如 p0=0.1 p1=0.8 p2=0.1,代表机器人有0.1的概念走到目标点的后面,有0.8的概率刚好到目标点,0.1的概率会超过目标点。
- 假设现在是[0.6, 0, 0, 0],机器人向前走两步,则 0.1 * 0.6 = 0.06, 0.8 * 0.6 = 0.48,结果是[0, 0.06, 0.48, 0.06],最后归一化处理。
- 需要注意的是,移动是对于全局表中所有概率都进行运算,一移动整个表都会移动的。移动完再进行归一化。这里涉及到全概率公式。
4.最后结果取最大值就是机器人的位置。
代码
这里选的是Udacity的习题,我的结果对了,但是就是提交失败,这是仅提供给大家参考
# show:
# 输入:
# 概率
# 输出:
# 格式化输出
def show(p):
rows = ['[' + ','.join(map(lambda x: '{0:.5f}'.format(x),r)) + ']' for r in p]
print('[' + ',\n '.join(rows) + ']')
# sense:
# 输入:
# probs 当前概率分布
# term 观察到的特征
# 输出:
# p 添加滤波后的概率分布
def sense(probs, term, sensor_right) :
s = 0
for i in range(len(probs)) :
for j in range(len(probs[0])) :
# 判断是不是目标特征
# 方便为后面添加不同的滤波器
hit = (colors[i][j] == term)
probs[i][j] *= (hit * sensor_right + (1 - hit) * (1 - sensor_right))
s += probs[i][j]
for i in range(len(probs)) :
for j in range(len(probs[0])) :
probs[i][j] /= s
return probs
# move:
# 输入:
# probs 当前概率分布
# motion 移动指令
# 输出:
# p 卷积后的概率分布
def move(probs, motion, p_move) :
q = []
x = len(probs)
y = len(probs[0])
#竖着移动
if motion[0] != 0 :
for i in range(x) :
tmp = []
for j in range(y) :
s = p_move * probs[(i - motion[0]) % x][j]
s += (1 - p_move) * probs[(i - motion[0] + 1) % x][j]
tmp.append(s)
q.append(tmp)
#横着移动
else :
for i in range(x) :
tmp = []
for j in range(y) :
s = p_move * probs[i][(j - motion[1]) % y]
s += (1 - p_move) * probs[i][(j - motion[1] + 1) % y]
tmp.append(s)
q.append(tmp)
return q
#localize:
# 输入:
# colors 二维空间
# measurements 观察到的特征
# motions 移动
# sensor_right 滤波器概率
# p_move 移动卷积概率
# 输出:
# probs 概率分布
def localize(colors, measurements, motions, sensor_right, p_move) :
pinit = 1.0 / float(len(colors)) / float(len(colors[0]))
p = [[pinit for row in range(len(colors[0]))] for col in range(len(colors))]
for i in range(len(motions)) :
p = move(p, motions[i], p_move)
p = sense(p, measurements[i], sensor_right)
return p
# colors:
# 二维空间特征
colors = [['R','G','G','R','R'],
['R','R','G','R','R'],
['R','R','G','G','R'],
['R','R','R','R','R']]
# measurements:
# 观察到的特征
measurements = ['G','G','G','G','G']
# motions:
# 移动轨迹
motions = [[0,0],[0,1],[1,0],[1,0],[0,1]]
#############################################################
# 对于一下的例子,应该输出:
# [[0.01105, 0.02464, 0.06799, 0.04472, 0.02465],
# [0.00715, 0.01017, 0.08696, 0.07988, 0.00935],
# [0.00739, 0.00894, 0.11272, 0.35350, 0.04065],
# [0.00910, 0.00715, 0.01434, 0.04313, 0.03642]]
# ( +/- 0.001 的误差)
p = localize(colors, measurements, motions, sensor_right = 0.7, p_move = 0.8)
show(p)