直立代码分析__两轮平衡小车原理
本文依据网上资源整理而来,适用于初学直立车者。
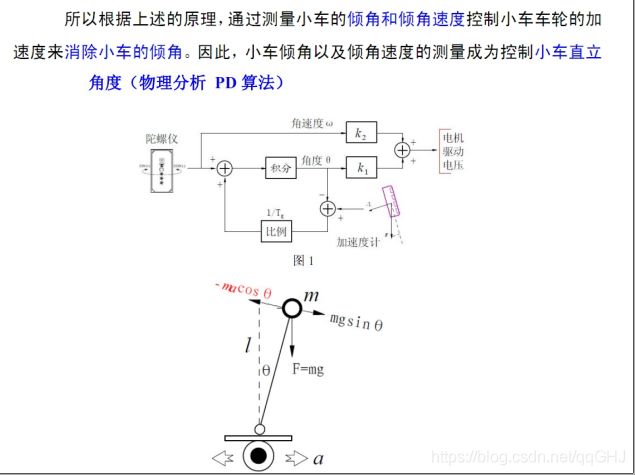
一、原理
平衡小车是通过两个电机运动下实现小车不倒下直立行走的多功能智能小
车,在外力的推拉下,小车依然保持不倒下。这么一说可能还没有很直观的了解
究竟什么是平衡小车,不过这个平衡小车实现的原理其实是在人们生活中的经验
得来的。如果通过简单的练习,一般人可以通过自己的手指把木棒直立而不倒的
放在指尖上,所以练习的时候,需要学会的两个条件:一是放在指尖上可以移动
二是通过眼睛观察木棒的倾斜角度和倾斜趋勢(角速度)。通过手指的移动去抵
消木棒倾斜的角度和趋势,使得木棒能直立不倒。这样的条件是不可以缺一的,
实际上加入这两个条件,控制过程中就是负反馈机制。
而世界上没有任何一个人可以蒙眼不看,就可以直立木棒的,因为没有眼睛
的负反馈,就不知道笔的倾斜角度和趋势。这整个过程可以用一个执行式表达:





二、平衡代码
balance.c
#include "Balance.h"
S_FLOAT_XYZ
GYRO_Real, // 陀螺仪转化后的数据
ACC_Real, // 加速度计转化后的数据
Attitude_Angle, // 当前角度
Last_Angle, // 上次角度
Target_Angle; // 目标角度
S_INT16_XYZ
GYRO, // 陀螺仪原始数据
GYRO_Offset, // 陀螺仪温飘
GYRO_Last, // 陀螺仪上次数据
ACC, // 加速度计数据
ACC_Offset, // 加速度计温飘
ACC_Last; // 加速度计上次数据
S_INT32_XYZ
Tar_Ang_Vel, // 目标角速度
Tar_Ang_Vel_Last; // 上次目标角速度
int32
Speed_Now = 0, // 当前实际速度
Speed_Min = 0, // 左右最小速度
Speed_Set = 0, // 目标设定速度
Theory_Duty = 0,// 理论直立占空比
Vel_Set = 0, // 目标转向角速度
Direct_Parameter = 0,// 转向系数
Direct_Last = 0,
Radius = 0; // 目标转向半径倒数
uchar Point = 80;
int32 Difference = 0;
/* 各种标志位,放定时器中进行时序控制 */
char Speed_Flag, Angle_Flag, Ang_Velocity_Flag, DMP_Flag;
/********************************************************/
/********************* 串级平衡控制 *********************/
// 频率控制在定时器中设置
void Balance_Control(void)
{
if (Ang_Velocity_Flag) // 直立角速度环 2ms
{
Ang_Velocity_Flag = 0;
MPU6050_GetData(&GYRO, &ACC); // 读取陀螺仪数据
Data_Filter(); // 对原始数据滑动滤波
/* 角速度环作为最内环控制直立 */
Theory_Duty += PID_Increase(&Ang_Vel_PID, Ang_Vel, (int32)(GYRO_Real.Y*10), (int32)(Tar_Ang_Vel.Y)); // 计算直立PWM (int32)(Tar_Ang_Vel.Y)
Theory_Duty = range_protect(Theory_Duty, -950, 950);
// if (System_OK)
// { //Speed_Min
// Direct_Parameter = PID_Realize(&Direct_PID, Direct, (int32)(GYRO_Real.Z*100), Radius*Speed_Min);// 转向环左正右负
// Direct_Parameter = range_protect(Direct_Parameter, -1200, 1200);
// }
//
// Direct_Last = Direct_Last*0.3 + Direct_Parameter*0.7; // 更新上次角速度环结果
MOTOR_Duty_Left =Theory_Duty ; // 左右电机根据转向系数调整差速- Direct_Last
MOTOR_Duty_Right =Theory_Duty ; //+ Direct_Last
// if (Run_Flag)
// {
MOTOR_Control(MOTOR_Duty_Left, MOTOR_Duty_Right); // 控制左右电机
// }
// else
// {
// if (Stop_Flag)
// {
// if (Speed_Now > 20)
// {
// MOTOR_Control(-350, -350);
// }
// else
// {
// MOTOR_Control(0, 0);
// }
// }
//
// else
// {
// MOTOR_Control(0, 0);
// }
// }
Get_Attitude();
mpu_dmp_get_data(&Attitude_Angle.Y, &Attitude_Angle.X, &Attitude_Angle.Z); // 使用DMP直接读取欧拉角
}
if (Angle_Flag) // 直立角度环 10ms
{
Angle_Flag = 0;
Speed_Measure();// 获取当前速度/* 角度环加到角速度环上串级控制 */
Tar_Ang_Vel.Y = PID_Realize(&Angle_PID, Angle, (int32)(Attitude_Angle.Y*100), (int32)Target_Angle.Y); // 结果为放大10倍的目标角速度 (int32)Target_Angle.Y
// Tar_Ang_Vel.Y = range_protect(Tar_Ang_Vel.Y, -1500, 1500); // 注意正负号
}
if (Speed_Flag) // 速度环 100ms
{
Speed_Flag = 0;
Target_Angle.Y = PID_Realize(&MOTOR_PID, MOTOR, Speed_Now, Speed_Set); // 结果为放大100倍的目标角度
Target_Angle.Y += Zero_Angle*100; // 目标角度叠加在零点上
// Target_Angle.Y = range_protect((int32)Target_Angle.Y, 1000, 4000); // -44 22
Speed_Min = Speed_Min * 0.1 + Speed_Now * 0.9;
if (Speed_Min < 40)
{
Speed_Min = 40;
}
}
}
/* 初始化用到的一些变量 */
void Balance_Init(void)
{
Attitude_Angle.Y = 0;
Target_Angle.Y = 0;
Tar_Ang_Vel.Y = 0;
Tar_Ang_Vel.Z = 0;
}
balance.h
#ifndef __BALANCE_H__
#define __BALANCE_H__
#include "common.h"
#include "include.h"
#define Zero_Angle -37.8f // 蓝色电池-3.8
//#define Zero_Angle 22.0f // 白色电池
extern S_FLOAT_XYZ
GYRO_Real, // 陀螺仪转化后的数据
ACC_Real, // 加速度计转化后的数据
Attitude_Angle, // 当前角度
Last_Angle, // 上次角度
Target_Angle; // 目标角度
extern S_INT16_XYZ
GYRO, // 陀螺仪原始数据
GYRO_Offset, // 陀螺仪温飘
GYRO_Last, // 陀螺仪上次数据
ACC, // 加速度计数据
ACC_Offset, // 加速度计温飘
ACC_Last; // 加速度计上次数据
extern S_INT32_XYZ
Tar_Ang_Vel, // 目标角速度
Tar_Ang_Vel_Last; // 上次目标角速度
extern int32
Speed_Now, // 当前实际速度
Speed_Min, // 左右最小速度
Speed_Set, // 目标设定速度
Vel_Set, // 目标转向角速度
Direct_Parameter,
Radius;
extern uchar Point;
extern int32 Difference;
extern char Speed_Flag, Angle_Flag, Ang_Velocity_Flag, DMP_Flag;
//extern float Zero_Angle ;
void Balance_Control(void);
void Balance_Init(void);
#endif