Python+OpenCV图像处理(二)——几何变换
系列文章
Python+OpenCV图像处理(一)——OpenCV框架与图像插值算法
Python+OpenCV图像处理(二)——几何变换
Python+OpenCV图像处理(三)——彩色空间互换
Python+OpenCV图像处理(四)——图像滤波
Python+OpenCV图像处理(五)——图像阈值和二值化
Python+OpenCV图像处理(六)——边缘检测
目录
-
- 二、几何变换
-
- 2.1 简介
- 2.2 算法理论
-
- 2.2.1 变换形式
- 2.2.2 坐标系变换
- 2.2.3 图像坐标系与笛卡尔坐标系转换关系
- 2.3 OpenCV+Python实现
二、几何变换
2.1 简介
几何变换,通常指的是对数字图像进行平移、旋转、镜像等。
通常在传统的cv领域,由于人为进行拍摄图像的时候,有很多干扰会导致拍摄角度有问题,需要对图像进行矫正处理,这个矫正的过程正是以几何变换为基础的。另外,在当下比较火热的深度学习领域,在有些情况下,由于样本数量较少,导致训练的模型不够理想,这时,需要自行得到较多的训练样本,这里就可以用到几何变换进行对图像数据进行扩增。
不同的几何变换,原理基本相似,只是变换矩阵有一定的差异。
2.2 算法理论
2.2.1 变换形式
从2.1可以知道,不同的变换形式只是变换矩阵有差异,这里先对这些差异进行研究。
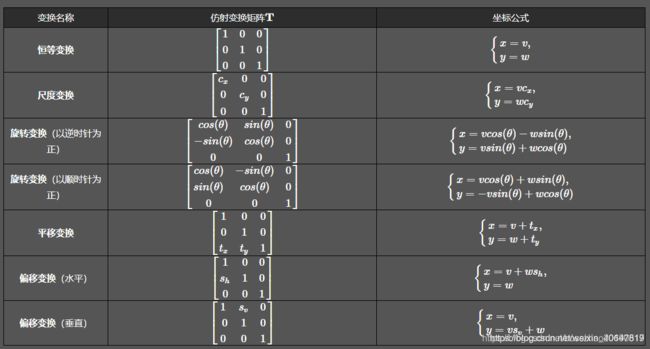
这里采用冈萨雷斯的《数字图像处理_第三版》的变换矩阵形式,与我们实现用到的OpenCV有些许差异,对于OpenCV我们可以参考它的官方文档。这里的仿射变换如下:

式中的T就是变换矩阵,其中 (v,w)为原坐标,(x,y) 为变换后的坐标,一些常见的变换矩阵及其对应的作用如下:
2.2.2 坐标系变换
我们知道,在平移和缩放的变换中,可以任意选择变换中心,然而对于旋转和偏移,则不能够随便选择了,我们一般情况下选择图像的中心点为变换中心。
然而图像坐标系和数学中的笛卡尔坐标系是不同的,在我们做几何变换的时候通常是以笛卡尔坐标系进行变换的。两种坐标系如下图:

具体变换是:
- 将输入原图图像坐标转换为笛卡尔坐标系;
- 进行旋转计算。旋转矩阵前面已经给出了;
- 将旋转后的图像的笛卡尔坐标转回图像坐标。
2.2.3 图像坐标系与笛卡尔坐标系转换关系
在图像中我们的坐标系通常是AB和AC方向的,原点为A,而笛卡尔直角坐标系是DE和DF方向的,原点为D,如图所示:

令图像表示为M×N的矩阵,对于点A而言,两坐标系中的坐标分别是(0,0)和(-N/2,M/2),则图像某像素点(x’,y’)转换为笛卡尔坐标(x,y)转换关系为,x为列,y为行:
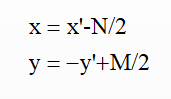
逆变换为:

于是,根据前面说的3个步骤(3次变换),旋转(顺时针旋转)的变换形式就为,3次变换就有3个矩阵:

根据上一节谈到的图像插值算法,我们这里用反向映射并通过插值得到输出图像对应未知的灰度值,即扫描输出图像的位置(x,y),通过
(为T的逆矩阵)计算输入图像对应的位置 (v,w)。
2.3 OpenCV+Python实现
缩放
上节已经介绍了cv2.resize函数,这里不再详细展开。
平移
可以使用cv2.warpAffine实现几何变换,第一个参数为图片,第二个参数为变换矩阵,对于平移来说,就是平移的宽和高,第三个参数为输出图像的大小,注意行数等于高,列数等于宽。
#%%
import numpy as np
import cv2
img = cv2.imread('gogo.png',1)
#这里注意,由于图片为彩色,共三通道,所以对shape做切片操作
rows,cols = img.shape[:2]
print(rows,cols)
M = np.float32([[1,0,200],[0,1,100]])
dst = cv2.warpAffine(img,M,(cols,rows))
cv2.imshow('original img',img)
cv2.imshow('img',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
旋转
OpenCV提供了一个函数cv2.getRotationMatrix2D来构建旋转变换矩阵,第一参数为旋转中心;第二个参数为旋转角度,默认逆时针旋转;第三个参数为缩放比例。
#%%
import numpy as np
import cv2
img = cv2.imread('gogo.png',1)
rows,cols = img.shape[:2]
M1 = cv2.getRotationMatrix2D((cols/2.0,rows/2.0),45,0.7)
dst1 = cv2.warpAffine(img,M1,(cols,rows))
M2 = cv2.getRotationMatrix2D((cols/3.0,rows/2.0),90,0.5)
dst2 = cv2.warpAffine(img,M2,(cols,rows))
cv2.imshow('original img',img)
cv2.imshow('Rotate 45 degrees',dst1)
cv2.imshow('Rotate 90 degrees',dst2)
cv2.waitKey(0)
cv2.destroyAllWindows()

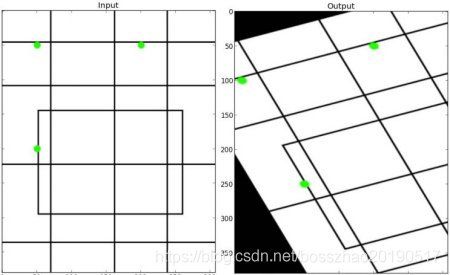
仿射变换
在仿射变换中,变换前后,平行之处仍然平行。为了找到变换矩阵,我们需要输入图像中的三个点及其在输出图像中的对应位置,利用cv2.getAffineTransform将创建一个2x3矩阵。图中绿点即为输入图像和输出图像对应的位置:
#%%
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('gogo.png',1)
rows,cols,channel = img.shape
pts1 = np.float32([[50,50],[400,50],[50,400]])
pts2 = np.float32([[100,200],[400,100],[40,450]])
M = cv2.getAffineTransform(pts1,pts2)
dst = cv2.warpAffine(img,M,(cols,rows))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
cv2.imshow('original img',img)
cv2.imshow('affine transform',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
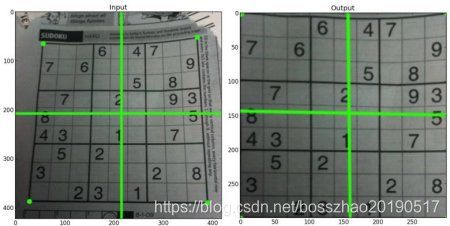
透视变换
对于透视变换,需要3x3变换矩阵。转换前后,直线仍然保持直线。对于变换矩阵,需要找出输入和输出图像中对应的四个点,其中三个不能共线。通过函数cv.getPerspectiveTransform得到变换矩阵。然后用cv.warpPerspective将转换矩阵传入,原理如图:
#%%
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('gogo.png')
rows,cols,ch = img.shape
pts1 = np.float32([[200,65],[550,52],[200,600],[550,600]])
pts2 = np.float32([[0,0],[cols,0],[0,rows],[cols,rows]])
M = cv2.getPerspectiveTransform(pts1,pts2)
dst = cv2.warpPerspective(img,M,(cols,rows))
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()
cv2.imshow('original img',img)
cv2.imshow('affine transform',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()