WACV 2021 论文大盘点-智能驾驶篇

本篇为智能驾驶相关论文,含车道线检测、自动驾驶,共计 5 篇。
如有遗漏,欢迎补充。
下载包含这些论文的 WACV 2021 所有论文:
『WACV 2021 开幕,更偏重技术应用,附论文下载』
车道线检测
End-to-end Lane Shape Prediction with Transformers
使用 Transformer 捕获道路中细长车道线特征和全局特征,所发明的车道线检测算法与以往相比,可端到端训练、参数量更少、速度更快(高达 420 fps,单 1080Ti)。
作者 | Ruijin Liu, Zejian Yuan, Tie Liu, Zhiliang Xiong
单位 | 西安交通大学;首都师范大学等
论文 | https://arxiv.org/abs/2011.04233
代码 | https://github.com/liuruijin17/LSTR
详解 | Transformer 又立功了!又快(420 fps)又好的车道线检测算法

自动驾驶
Multimodal Trajectory Predictions for Autonomous Driving Without a Detailed Prior Map
作者提出一个基于 GAN 的全新框架,解决自动驾驶中的地图没有明确表示道路规则的问题。其中 discriminator 可以区分预测的轨迹是否遵循道路规则,而 generator 可以预测遵循它的轨迹。在 trajectory errors(轨迹误差)和落在可行驶车道上的轨迹比例方面都优于最先进方法。
作者 | Atsushi Kawasaki, Akihito Seki
单位 | 日本 Toshiba
论文 |
https://openaccess.thecvf.com/content/WACV2021/papers/Kawasaki_Multimodal_Trajectory_Predictions_for_Autonomous_Driving_Without_a_Detailed_Prior_WACV_2021_paper.pdf
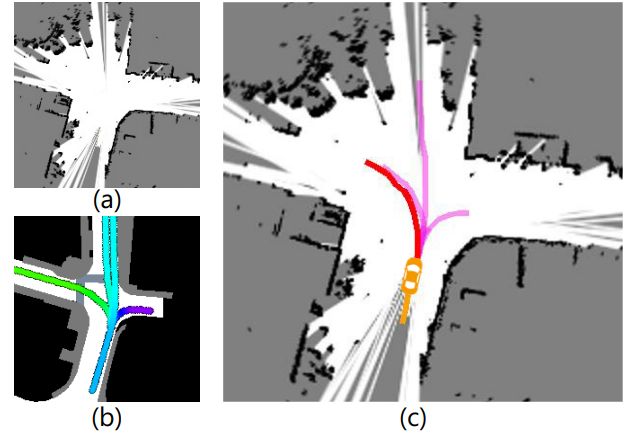
Generalized Object Detection on Fisheye Cameras for Autonomous Driving: Dataset, Representations and Baseline
作者 | Hazem Rashed, Eslam Mohamed, Ganesh Sistu, Varun Ravi Kumar, Ciaran Eising, Ahmad El-Sallab, Senthil Yogamani
单位 | Valeo R&D等
论文 | https://arxiv.org/abs/2012.02124

Let's Get Dirty: GAN Based Data Augmentation for Camera Lens Soiling Detection in Autonomous Driving
用于自动驾驶中广角鱼眼镜头污染检测的新型基于 GAN 的数据增强技术。
作者 | Michal Uricar, Ganesh Sistu, Hazem Rashed, Antonin Vobecky, Varun Ravi Kumar, Pavel Krizek, Fabian Burger, Senthil Yogamani
单位 | Independent Researcher;Valeo等
论文 | https://arxiv.org/abs/1912.02249

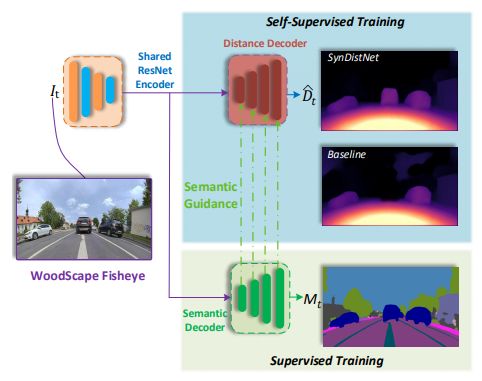
SynDistNet: Self-Supervised Monocular Fisheye Camera Distance Estimation Synergized with Semantic Segmentation for Autonomous Driving
本文介绍了一种新型的多任务学习策略,以改善鱼眼和针孔相机图像的自监督单目距离估计。在 KITTI 上使用针孔模型评估了所提出的方法,在不需要外部尺度估计的情况下,实现了自监督方法中最先进的性能。
作者 | Varun Ravi Kumar, Marvin Klingner, Senthil Yogamani, Stefan Milz, Tim Fingscheidt, Patrick Maeder
单位 | Valeo DAR Kronach, Germany等
论文 | https://arxiv.org/abs/2008.04017
- END -
编译:CV君
转载请联系本公众号授权

备注:智能驾驶

智能驾驶交流群
车道线检测、自动驾驶、行人意图识别等技术,
若已为CV君其他账号好友请直接私信。
OpenCV中文网
微信号 : iopencv
QQ群:805388940
微博/知乎:@我爱计算机视觉
网站:www.52cv.net

在看,让更多人看到 