A星寻路算法简易版(代码实现)

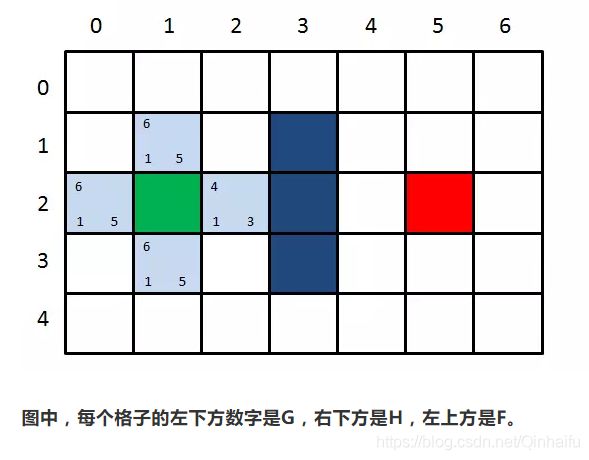
绿色为起点,红色为终点,蓝色为墙不可走。启动只能上下左右不可以斜着走。
以下为A*寻路算法代码实现,核心思想就是只走F值(格子评估值)最小的格子,直至到达终点。
F值最小代表着从起点出发到达终点需要的最少的步数,只走最少的步数,那么路径就是最短的。
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
typedef struct _node
{
int x;//地图中的第几行
int y;//地图中的第几列
int F;//评估值F=G+H,G代表从起点到当前格子的成本,H代表从当前格无视障碍到目标的成本
//尽量选择步数少的也就是F值小的
int G;//G代表从起点到当前格子的成本,也就是走了多少步
int H;//H代表从当前格无视障碍到目标的成本,也就是至少还需要多少步
struct _node* preNode;//父节点
}node;
vector openList;//储存可到达或可走的格子
vector closeList;//储存已经到达或者已经走过的格子
int map[5][7]{
//5行7列
// 0 1 2 3 4 5 6
0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0,
};
//node map[1][2]{
{
{0,0,0,0,0}},{
{0,0,0,0,0}}};
//找出OpenList中F值最小的方格
int findMinNode()
{
int index = 0;
int size = openList.size();
for(int i=1;iF < openList[index]->F)
{
index = i;
}
}
return index;
}
void findNeighbors(node* current,node* end)
{
int openSize = openList.size();
int closeSize = closeList.size();
bool isInclude = false;
//上
if(current->x-1>=0 &&map[current->x-1][current->y]==0 )
{
for(int i =0;ix == current->x-1 && openList[i]->y == current->y)
{
isInclude = true;
break;
}
}
for(int i =0;ix == current->x-1 && closeList[i]->y == current->y)
{
isInclude = true;
break;
}
}
if(isInclude == false)
{
node *up = (node*)new node;
up->x = current->x-1;
up->y = current->y;
cout<<"up "<x<<" "<y<G = current->G+1;
up->H = abs(end->x-up->x)+abs(end->y-up->y);
up->preNode = current;
openList.push_back(up);
}
}
//下
isInclude = false;
if(current->x+1<5 &&map[current->x+1][current->y]==0 )
{
for(int i =0;ix == current->x+1 && openList[i]->y == current->y)
{
isInclude = true;
break;
}
}
for(int i =0;ix == current->x+1 && closeList[i]->y == current->y)
{
isInclude = true;
break;
}
}
if(isInclude == false)
{
node* down=(node*)new node;
down->x = current->x+1;
down->y = current->y;
cout<<"down "<x<<" "<y<G = current->G+1;
down->H = abs(end->x-down->x)+abs(end->y-down->y);
down->preNode = current;
openList.push_back(down);
}
}
//左
isInclude = false;
if(current->y-1>=0 &&map[current->x][current->y-1]==0)
{
for(int i =0;ix == current->x && openList[i]->y == current->y-1)
{
isInclude = true;
break;
}
}
for(int i =0;ix == current->x && closeList[i]->y == current->y-1)
{
isInclude = true;
break;
}
}
if(isInclude == false)
{
node* left=(node*)new node;
left->x = current->x;
left->y = current->y-1;
cout<<"left "<x<<" "<y<G = current->G+1;
left->H = abs(end->x-left->x)+abs(end->y-left->y);
left->preNode = current;
openList.push_back(left);
}
}
//右
isInclude = false;
if(current->y+1<7 &&map[current->x][current->y+1]==0)
{
for(int i =0;ix == current->x && openList[i]->y == current->y+1)
{
isInclude = true;
break;
}
}
for(int i =0;ix == current->x && closeList[i]->y == current->y+1)
{
isInclude = true;
break;
}
}
if(isInclude == false)
{
node* right=(node*)new node;
right->x = current->x;
right->y = current->y+1;
cout<<"right "<x<<" "<y<G = current->G+1;
right->H = abs(end->x-right->x)+abs(end->y-right->y);
right->preNode = current;
openList.push_back(right);
}
}
}
void AstarSerch (node* start,node* end)
{
openList.push_back(start);
while(openList.size()>0)
{
int currentIndex = findMinNode();//找出OpenList中F值最小的方格,并把该格移出OpenList,放入CloseList。代表这个格子已到达并检查过了。
node* current = openList[currentIndex];
openList.erase(openList.begin()+currentIndex);
closeList.push_back(current);
findNeighbors(current,end);//找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。计算出相应的G、H、F值,并把当前格子作为它们的“父亲节点”。
for(int i =0;ix == end->x && openList[i]->y == end->y)
{
cout<<"find it"<preNode)
{
cout<<""<x<<" "<y<preNode);
}
return;
}
}
}
}
int main()
{
node* start=(node*)new node;
start->x=2;
start->y=1;
start->F=0;
start->G=0;
start->H=0;
start->preNode = nullptr;
node* end=(node*)new node;
end->x=2;
end->y=5;
end->F=0;
end->G=0;
end->H=0;
AstarSerch(start,end);
return 0;
}