- 碳课堂|氢能--双碳目标下的未来能源之星
运维算法
随着全球气候变化的严峻挑战,实现碳达峰和碳中和已成为各国共同追求的目标。在此背景下,清洁能源的开发和利用变得尤为关键。其中氢能,以其独特的清洁、高效和可再生的特性,被视为推动能源转型和实现双碳目标的重要力量。本文将深入探讨氢能的基本概念和应用领域。什么是氢能?氢能是指通过氢气(H2)作为能源载体进行能量转换和利用的能源形式。氢气可以通过多种方式制取,包括化石燃料重整、工业副产品提纯以及通过可再生能
- Python常见字符串函数
流着口水看上帝
python
1.字符串基本操作函数-len():-功能:返回字符串的长度,即字符的个数。-示例:string="Hello"print(len(string))输出结果为5。-str():-功能:将其他数据类型转换为字符串类型。-示例:num=123string_num=str(num)print(type(string_num))输出结果为,说明num被成功转换为字符串类型。2.字符串查找函数-find()
- JAVA中的ObjectOutputStream类
程序研
javaI/Ojava后端I/O开发语言
ObjectOutputStream是Java中用于序列化对象的一种输出流,它可以将Java对象的状态信息转换为字节流,以便于存储或通过网络传输。序列化是将对象转换为字节流的过程,而反序列化则是将字节流恢复为对象的过程。本文将详细介绍ObjectOutputStream的原理、使用方法以及相关代码例子。一、ObjectOutputStream简介概述ObjectOutputStream是Java.
- 【部署prometheus+pushgateway+node_exporter+opengauss_exporter+grafana监控openGauss数据库】
momge
prometheus数据库
1.Prometheus组件总览如上图所示,Prometheus监控系统主要由三部分组成:监控数据采集(上图左)、监控数据存储处理(上图中)、监控数据显示上报(上图右)exporters该工具用于将Prometheus不能识别的指标数据转换为Prometheus能识别的指标数据,它可以将各种应用程序、服务、操作系统等的指标数据暴露为HTTP接口,供PrometheusServer采集。pushga
- 使用ModelScope实现高效句嵌入生成
dagGAIYD
python
技术背景介绍在自然语言处理(NLP)任务中,向量化文本(嵌入)是许多下游任务(如语义搜索、文本分类、问答系统等)的核心步骤之一。通过将文本转换为密集向量表示,我们可以在高维向量空间中构建更加高效的表示和检索算法。ModelScope是阿里云开源的一个模型和数据集管理平台,提供了大量预训练模型,涵盖了各种领域和任务。ModelScopeEmbeddings是一个与LangChain社区集成的工具类,
- OpenCV相机标定与3D重建(63)校正图像的畸变函数undistort()的使用
jndingxin
OpenCVopencv3d
操作系统:ubuntu22.04OpenCV版本:OpenCV4.9IDE:VisualStudioCode编程语言:C++11算法描述转换图像以补偿镜头畸变。该函数通过变换图像来补偿径向和切向镜头畸变。此函数仅仅是initUndistortRectifyMap(使用单位矩阵R)和remap(使用双线性插值)的组合。有关执行的具体变换详情,请参阅前者函数。对于在源图像中没有对应像素的目的图像中的像
- 论面向服务的架构与其应用
zju3080103798
软考bigdata人工智能运维
论面向服务的架构与其应用摘要:2020年4月,本人所在的某市金融投资集团启动了集团综合管理系统建设,该项目实现基金、融资租赁、资金管理、转贷、融资担保、保理等金融业务信息化及人力资源、智能办公、法务管理等内部管理功能,在此项目中,我担任了架构师,负责项目总体架构设计工作。本文以该综合管理系统为例,主要论述了面向服务的架构在该系统中的应用。提供数据联邦、数据复制转换、工作流集成等控制服务实现新老系统
- es-Ingest pipelines
童小绿
笔记elasticsearch大数据bigdata
Ingestpipelinesnode为ingest角色,对indexingrequest做预处理,主要用于数据转换为合规、期望值的场景官方地址:https://www.elastic.co/guide/en/elasticsearch/reference/7.13/ingest.html#ingest使用pipeline必要条件node角色必须为:ingestpipeline的组成{"descr
- C#调用方法时的二义性解决方法
ttod_qzstudio
C#Unity
如图中出现的错误:里面有三个名字为SetCurrentSelectableObject的方法,其中两个的参数都是引用对象,一个是SelectableObject类型,一个是string类型,这样导致引用出现了二义性,解决的办法就是对null进行强制转换,向下面这样写:SetCurrentSelectableObject((SelectableObject)null);
- c++每日力扣之将日期转化为二进制表示
我不是程序员~~~~
C&C++c++leetcode开发语言
给你一个字符串date,它的格式为yyyy-mm-dd,表示一个公历日期。date可以重写为二进制表示,只需要将年、月、日分别转换为对应的二进制表示(不带前导零)并遵循year-month-day的格式。返回date的二进制表示。示例1:输入:date="2080-02-29"输出:"100000100000-10-11101"解释:100000100000,10和11101分别是2080,
- error: invalid conversion from ‘const char*‘ to ‘char‘ [-fpermissive]
卢一涵
qt开发语言
double转QString时,可以使用QString::number();进行转换,并且可以保留小数点位数。转换字符串的时候出现标题所述的bug。改了好久就是改不好,后来才发现,原来是引号的问题!!!我去,这谁能看得出来啊,我去,这bug有点过分了吧,这让人怎么改。注意看,下面代码中f的引号:QStringstring=QString::number(1.666666,"f",3);QStrin
- javaScript 的语法糖全解
Young丶
vue3jsjavascript开发语言ecmascript
最近在阅读一些JavaScript代码时,我们发现很多时候可以用更简洁的语法来完成相同的操作,这便是“语法糖”的魅力。语法糖是一种对底层语法的封装和简化,通过编译器将其转换成等价的标准语法来实现。例如,在Java中,泛型和Lambda表达式都是语法糖。泛型在编译过程中会被转换成非泛型的形式,而Lambda表达式会被转换为对应的匿名内部类形式。语法糖的优缺点优点:简洁性:语法糖使代码更加简洁
- PDF的全能工具箱,你必不可少的办公助手
Ag大雨
pdf
PDFgear是一款集合了多种PDF处理工具的软件套装它包括PDF阅读、编辑、转换、合并和签署等功能。这款软件提供了全面的PDF处理解决方案,使用户能够轻松地完成各种与PDF文件相关的任务。功能特点多功能性:支持多种与PDF相关的操作,包括但不限于编辑、转换、合并和签署。这为用户提供了一个一站式的解决方案,可以满足各种与PDF文件处理相关的需求。文本编辑:支持编辑PDF文本,允许用户添加、替换甚至
- oracle 外部表性能,oracle外部表的使用
凌柒y
oracle外部表性能
转外部表为OracleWarehousebuilder用户提供了巨大的好处。通过使用外部表,WarehouseBuilder开发人员不再需要创建平面文件临时表。这样,外部表就减少了加载平面文件数据的处理时间,而且需要的额外存储空间也比平面文件临时表少。外部表可以与关系表和其他外部表连接。从而在平面文件和关系表之间实现了异类连接。此外,由于消除了额外的步骤,因此PL/SQL转换与SQL加载程序转换相
- 蓝桥杯常用api总结
后端开发日记
数据结构算法javaacm竞赛
蓝桥杯常用api总结:Util:Util.print(arr);//打印数组String:str.length();//获取长度:str.subSting(start,end);//(取到end-1)切片函数:str.charAt(i);//获取某个位置的字符:toCharArray();//转换成字符数组:x.compareTo(y);//x,y两个字符串比较字典序:(代表的数字的大小比较):S
- Java前端基础—HTML
缺少动力的火车
前端基础集合前端javahtml
Java前端基础—HTML目录Java前端基础—HTML1.简介2.基础语法2.1HTML页面固定结构2.2标题标签2.3段落标签2.4换行标签2.5水平线标签2.6文本标签2.7图片标签2.8音频标签2.9视频标签2.10链接标签2.11列表标签2.12表格标签2.13表单标签2.14语义标签1.简介1.网页组成:文字,图片,音频,视频,超链接。2.代码如何转换成网页:依靠的是浏览器的渲染和解析
- python数据分析与可视化
盆蒂
python开发语言
一、Python数据分析概述Python是一种解释型、交互式的编程语言,其设计理念强调代码的可读性和简洁性。Python的语法结构简单,支持面向对象、过程式和函数式三种编程范式,使得Python成为一种强大而灵活的编程语言。Python数据分析主要包括数据清洗、数据探索和数据可视化三个部分。数据清洗是数据分析的重要环节,主要是对数据进行预处理,包括缺失值处理、异常值处理、数据类型转换等。数据探索则
- 解锁C#编程新姿势:Z.ExtensionMethods入门秘籍
步、步、为营
c#数据库.net服务器
一、引言在C#的开发旅程中,我们常常会遇到各种重复性高、复杂度低的任务,这些任务虽然基础,但却占据了我们大量的开发时间。比如处理字符串时,经常需要进行非空判断、格式转换;操作日期时间时,计算某个月的起始和结束日期;管理集合时,对元素进行遍历、排序等。这些看似简单的操作,若每次都手动编写代码,不仅效率低下,还容易出错。Z.ExtensionMethods的出现,如同为C#开发者们配备了一把万能钥匙,
- c#视觉应用开发中如何在C#中进行图像颜色空间转换?
openwin_top
C#视觉应用开发问题系列c#开发语言计算机视觉视觉检测.net
microPythonPython最小内核源码解析NI-motion运动控制c语言示例代码解析python编程示例系列python编程示例系列二python的Web神器Streamlit如何应聘高薪职位在C#中进行图像颜色空间转换,通常涉及将图像从一种颜色空间转换到另一种颜色空间,例如从RGB转换到灰度、HSV或YUV等。为了实现这些转换,您可以使用多种库和技术,包括.NET自带的System.D
- Css3 3D转换
黄丫丫07
css33dcss
特点:近大远小物体后面遮挡不可见三维坐标系:三维坐标系其实就是指立体空间,立体空间是由3个轴共同组成的。X轴:水平向右为正Y轴:垂直向下为正Z轴:垂直屏幕向外为正3D位移和3D旋转:主要知识点:3D位移:translate3d(x,y,z)3D旋转:rotate3d(x,y,z)透视:perspective3D呈现transform-style3D位移:translate3d(x,y,z):Tra
- 交叉引用多篇文献操作
小白也有IT梦
word
要在Word中为多个连续的参考文献创建一个交叉引用(如[1-3]表示文献1、2、3),你可以按以下步骤操作:使用“交叉引用”功能,插入你需要引用的文献范围内的第一个和最后一个文献编号,比如[1][3]。选中这两个编号,右键选择“切换域代码”,将其转换为域代码形式。对于第一个文献的域代码,在代码末尾添加\#"[0";对于最后一个文献的域代码,在代码末尾添加\#"0]"。\#"[0",\"#0]"选择
- CSS3 2D 转换介绍
半点寒12W
csscss3css前端
CSS3中的2D转换(2DTransforms)允许你在二维平面上对元素进行操作,如移动、旋转、缩放和倾斜等,这可以让网页的布局和动画效果更加丰富多样。以下是一些主要的2D转换方法:一、translate(移动)语法:transform:translate(x,y);或者transform:translateX(x);和transform:translateY(y);。其中x和y是长度值(可以是像
- 分布式IO模块与S7-1200 PLC:打造高效分拣系统的新引擎
明达技术
分布式物联网
在现代化物流中心,快速、高效、准确的包裹分拣是衡量整个系统性能的关键指标。为了实现这一目标,国产IO模块与西门子S7-1200PLC的结合应用,正成为越来越多企业的首选方案。这一组合不仅优化了数据采集和处理流程,还显著提升了分拣效率,降低了运营成本。精准配合分布式IO模块是工业自动化系统中的关键组件,负责采集现场设备的各种信号,并将这些信号转换为数字信号传输给PLC。在分拣系统中,这些模块外接了各
- python3.6遇到Unicode编码字符串比较问题:\u672a\u4f7f\u7528与同样内容的变量比较总是false[已解决]
xiaobailx
python问题Python3Unicode字符串比较编码转换解码
我的state变量值是一个unicode编码的字符串,需求是和一个unicode编码的字符串比较state==’\u672a\u4f7f\u7528‘//结果是false原因及解决方法:当将unicode编码字符串输出时会直接转换为utf8格式即变成正常的中文。但变量state中存储的仍然是Unicode编码字符串所以不一致。且由于python3.6去除了字符串的decode方法,所以无法将变量中
- android备忘录教学_Android备忘录
兰伽禾
android备忘录教学
常用库Gradle依赖://retrofit2的gson转换器依赖compile'com.squareup.retrofit2:converter-gson:2.0.1'//retrofit2compile'com.squareup.retrofit2:retrofit:2.0.1'//retrofit2为RxJava准备的CallAdaptercompile'com.squareup.retro
- RK3568笔记七十六:使用V4L2框架录制MP4视频保存到本地
殷忆枫
RK3568学习笔记笔记
若该文为原创文章,转载请注明原文出处。录制MP4使用的是ffmpeg,如何编译自行处理。使用的是正点原子的RK3568测试,其他板子自行调试。一、程序功能介绍说明:程序参考FFMPEG提供的例子程序muxing.c进行修改。功能介绍:程序里目前有一个子线程和一个主线程,子线程通过linux标准的V4L2框架读取摄像头数据(NV12);然后把NV12数据转换为YUV420P格式(H264必须使用该格
- JNI Android Bitmap 和 cv::Mat 互相转换安卓手机运行Opencv动态库或普通c++函数配置指南
chezabo6116
android
JNIAndroidBitmap和cv::Mat互相转换https://blog.csdn.net/tyfwin/article/details/140714946安卓手机运行Opencv动态库或普通c++函数配置指南https://blog.csdn.net/snjs000111/article/details/135067493
- Python中判断列表是否包含某个元素的方法
五月天的尾巴
python判断列表是否包含元素
文章目录1、成员运算符in和notin2、使用count()方法3、使用any()函数4、使用set转换5、使用numpy库6、使用any()和生成器表达式7、使用index()方法8、使用itertools.chain()函数9、使用collections.Counter类10、使用pandas库以下整理几种判断列表中是否包含某个元素的方法。以下代码基于python2.7执行。1、成员运算符in
- python之enumerate函数
Yong_zhi
python学习python
文章目录一、enumerate函数介绍:二、语法三、我个人的一些学习尝试用python实现与enumerate函数同等功能一、enumerate函数介绍:在Python中,enumerate函数是一个用于将一个可迭代对象转换成一个enumerate对象的函数,同时也在循环中同时迭代元素和索引值。二、语法enumerate(iterable,start=0)参数说明iterable:必选参数,表示可
- EasyExcel 导出,保留两位小数并显示 千分位
Leslie_Lei
Exceljavaexcel
实体类属性类型为BigDecimal注解@NumberFormat("#,###.00")试过了不顶用,原因不太清楚值为0.81这种,导出后变为.81所以,换个思路,写个转换器,就是麻烦点转换器BigDecimalConvertimportcn.hutool.core.util.StrUtil;importcom.alibaba.excel.converters.Converter;importc
- 关于旗正规则引擎中的MD5加密问题
何必如此
jspMD5规则加密
一般情况下,为了防止个人隐私的泄露,我们都会对用户登录密码进行加密,使数据库相应字段保存的是加密后的字符串,而非原始密码。
在旗正规则引擎中,通过外部调用,可以实现MD5的加密,具体步骤如下:
1.在对象库中选择外部调用,选择“com.flagleader.util.MD5”,在子选项中选择“com.flagleader.util.MD5.getMD5ofStr({arg1})”;
2.在规
- 【Spark101】Scala Promise/Future在Spark中的应用
bit1129
Promise
Promise和Future是Scala用于异步调用并实现结果汇集的并发原语,Scala的Future同JUC里面的Future接口含义相同,Promise理解起来就有些绕。等有时间了再仔细的研究下Promise和Future的语义以及应用场景,具体参见Scala在线文档:http://docs.scala-lang.org/sips/completed/futures-promises.html
- spark sql 访问hive数据的配置详解
daizj
spark sqlhivethriftserver
spark sql 能够通过thriftserver 访问hive数据,默认spark编译的版本是不支持访问hive,因为hive依赖比较多,因此打的包中不包含hive和thriftserver,因此需要自己下载源码进行编译,将hive,thriftserver打包进去才能够访问,详细配置步骤如下:
1、下载源码
2、下载Maven,并配置
此配置简单,就略过
- HTTP 协议通信
周凡杨
javahttpclienthttp通信
一:简介
HTTPCLIENT,通过JAVA基于HTTP协议进行点与点间的通信!
二: 代码举例
测试类:
import java
- java unix时间戳转换
g21121
java
把java时间戳转换成unix时间戳:
Timestamp appointTime=Timestamp.valueOf(new SimpleDateFormat("yyyy-MM-dd HH:mm:ss").format(new Date()))
SimpleDateFormat df = new SimpleDateFormat("yyyy-MM-dd hh:m
- web报表工具FineReport常用函数的用法总结(报表函数)
老A不折腾
web报表finereport总结
说明:本次总结中,凡是以tableName或viewName作为参数因子的。函数在调用的时候均按照先从私有数据源中查找,然后再从公有数据源中查找的顺序。
CLASS
CLASS(object):返回object对象的所属的类。
CNMONEY
CNMONEY(number,unit)返回人民币大写。
number:需要转换的数值型的数。
unit:单位,
- java jni调用c++ 代码 报错
墙头上一根草
javaC++jni
#
# A fatal error has been detected by the Java Runtime Environment:
#
# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc=0x00000000777c3290, pid=5632, tid=6656
#
# JRE version: Java(TM) SE Ru
- Spring中事件处理de小技巧
aijuans
springSpring 教程Spring 实例Spring 入门Spring3
Spring 中提供一些Aware相关de接口,BeanFactoryAware、 ApplicationContextAware、ResourceLoaderAware、ServletContextAware等等,其中最常用到de匙ApplicationContextAware.实现ApplicationContextAwaredeBean,在Bean被初始后,将会被注入 Applicati
- linux shell ls脚本样例
annan211
linuxlinux ls源码linux 源码
#! /bin/sh -
#查找输入文件的路径
#在查找路径下寻找一个或多个原始文件或文件模式
# 查找路径由特定的环境变量所定义
#标准输出所产生的结果 通常是查找路径下找到的每个文件的第一个实体的完整路径
# 或是filename :not found 的标准错误输出。
#如果文件没有找到 则退出码为0
#否则 即为找不到的文件个数
#语法 pathfind [--
- List,Set,Map遍历方式 (收集的资源,值得看一下)
百合不是茶
listsetMap遍历方式
List特点:元素有放入顺序,元素可重复
Map特点:元素按键值对存储,无放入顺序
Set特点:元素无放入顺序,元素不可重复(注意:元素虽然无放入顺序,但是元素在set中的位置是有该元素的HashCode决定的,其位置其实是固定的)
List接口有三个实现类:LinkedList,ArrayList,Vector
LinkedList:底层基于链表实现,链表内存是散乱的,每一个元素存储本身
- 解决SimpleDateFormat的线程不安全问题的方法
bijian1013
javathread线程安全
在Java项目中,我们通常会自己写一个DateUtil类,处理日期和字符串的转换,如下所示:
public class DateUtil01 {
private SimpleDateFormat dateformat = new SimpleDateFormat("yyyy-MM-dd HH:mm:ss");
public void format(Date d
- http请求测试实例(采用fastjson解析)
bijian1013
http测试
在实际开发中,我们经常会去做http请求的开发,下面则是如何请求的单元测试小实例,仅供参考。
import java.util.HashMap;
import java.util.Map;
import org.apache.commons.httpclient.HttpClient;
import
- 【RPC框架Hessian三】Hessian 异常处理
bit1129
hessian
RPC异常处理概述
RPC异常处理指是,当客户端调用远端的服务,如果服务执行过程中发生异常,这个异常能否序列到客户端?
如果服务在执行过程中可能发生异常,那么在服务接口的声明中,就该声明该接口可能抛出的异常。
在Hessian中,服务器端发生异常,可以将异常信息从服务器端序列化到客户端,因为Exception本身是实现了Serializable的
- 【日志分析】日志分析工具
bit1129
日志分析
1. 网站日志实时分析工具 GoAccess
http://www.vpsee.com/2014/02/a-real-time-web-log-analyzer-goaccess/
2. 通过日志监控并收集 Java 应用程序性能数据(Perf4J)
http://www.ibm.com/developerworks/cn/java/j-lo-logforperf/
3.log.io
和
- nginx优化加强战斗力及遇到的坑解决
ronin47
nginx 优化
先说遇到个坑,第一个是负载问题,这个问题与架构有关,由于我设计架构多了两层,结果导致会话负载只转向一个。解决这样的问题思路有两个:一是改变负载策略,二是更改架构设计。
由于采用动静分离部署,而nginx又设计了静态,结果客户端去读nginx静态,访问量上来,页面加载很慢。解决:二者留其一。最好是保留apache服务器。
来以下优化:
- java-50-输入两棵二叉树A和B,判断树B是不是A的子结构
bylijinnan
java
思路来自:
http://zhedahht.blog.163.com/blog/static/25411174201011445550396/
import ljn.help.*;
public class HasSubtree {
/**Q50.
* 输入两棵二叉树A和B,判断树B是不是A的子结构。
例如,下图中的两棵树A和B,由于A中有一部分子树的结构和B是一
- mongoDB 备份与恢复
开窍的石头
mongDB备份与恢复
Mongodb导出与导入
1: 导入/导出可以操作的是本地的mongodb服务器,也可以是远程的.
所以,都有如下通用选项:
-h host 主机
--port port 端口
-u username 用户名
-p passwd 密码
2: mongoexport 导出json格式的文件
- [网络与通讯]椭圆轨道计算的一些问题
comsci
网络
如果按照中国古代农历的历法,现在应该是某个季节的开始,但是由于农历历法是3000年前的天文观测数据,如果按照现在的天文学记录来进行修正的话,这个季节已经过去一段时间了。。。。。
也就是说,还要再等3000年。才有机会了,太阳系的行星的椭圆轨道受到外来天体的干扰,轨道次序发生了变
- 软件专利如何申请
cuiyadll
软件专利申请
软件技术可以申请软件著作权以保护软件源代码,也可以申请发明专利以保护软件流程中的步骤执行方式。专利保护的是软件解决问题的思想,而软件著作权保护的是软件代码(即软件思想的表达形式)。例如,离线传送文件,那发明专利保护是如何实现离线传送文件。基于相同的软件思想,但实现离线传送的程序代码有千千万万种,每种代码都可以享有各自的软件著作权。申请一个软件发明专利的代理费大概需要5000-8000申请发明专利可
- Android学习笔记
darrenzhu
android
1.启动一个AVD
2.命令行运行adb shell可连接到AVD,这也就是命令行客户端
3.如何启动一个程序
am start -n package name/.activityName
am start -n com.example.helloworld/.MainActivity
启动Android设置工具的命令如下所示:
# am start -
- apache虚拟机配置,本地多域名访问本地网站
dcj3sjt126com
apache
现在假定你有两个目录,一个存在于 /htdocs/a,另一个存在于 /htdocs/b 。
现在你想要在本地测试的时候访问 www.freeman.com 对应的目录是 /xampp/htdocs/freeman ,访问 www.duchengjiu.com 对应的目录是 /htdocs/duchengjiu。
1、首先修改C盘WINDOWS\system32\drivers\etc目录下的
- yii2 restful web服务[速率限制]
dcj3sjt126com
PHPyii2
速率限制
为防止滥用,你应该考虑增加速率限制到您的API。 例如,您可以限制每个用户的API的使用是在10分钟内最多100次的API调用。 如果一个用户同一个时间段内太多的请求被接收, 将返回响应状态代码 429 (这意味着过多的请求)。
要启用速率限制, [[yii\web\User::identityClass|user identity class]] 应该实现 [[yii\filter
- Hadoop2.5.2安装——单机模式
eksliang
hadoophadoop单机部署
转载请出自出处:http://eksliang.iteye.com/blog/2185414 一、概述
Hadoop有三种模式 单机模式、伪分布模式和完全分布模式,这里先简单介绍单机模式 ,默认情况下,Hadoop被配置成一个非分布式模式,独立运行JAVA进程,适合开始做调试工作。
二、下载地址
Hadoop 网址http:
- LoadMoreListView+SwipeRefreshLayout(分页下拉)基本结构
gundumw100
android
一切为了快速迭代
import java.util.ArrayList;
import org.json.JSONObject;
import android.animation.ObjectAnimator;
import android.os.Bundle;
import android.support.v4.widget.SwipeRefreshLayo
- 三道简单的前端HTML/CSS题目
ini
htmlWeb前端css题目
使用CSS为多个网页进行相同风格的布局和外观设置时,为了方便对这些网页进行修改,最好使用( )。http://hovertree.com/shortanswer/bjae/7bd72acca3206862.htm
在HTML中加入<table style=”color:red; font-size:10pt”>,此为( )。http://hovertree.com/s
- overrided方法编译错误
kane_xie
override
问题描述:
在实现类中的某一或某几个Override方法发生编译错误如下:
Name clash: The method put(String) of type XXXServiceImpl has the same erasure as put(String) of type XXXService but does not override it
当去掉@Over
- Java中使用代理IP获取网址内容(防IP被封,做数据爬虫)
mcj8089
免费代理IP代理IP数据爬虫JAVA设置代理IP爬虫封IP
推荐两个代理IP网站:
1. 全网代理IP:http://proxy.goubanjia.com/
2. 敲代码免费IP:http://ip.qiaodm.com/
Java语言有两种方式使用代理IP访问网址并获取内容,
方式一,设置System系统属性
// 设置代理IP
System.getProper
- Nodejs Express 报错之 listen EADDRINUSE
qiaolevip
每天进步一点点学习永无止境nodejs纵观千象
当你启动 nodejs服务报错:
>node app
Express server listening on port 80
events.js:85
throw er; // Unhandled 'error' event
^
Error: listen EADDRINUSE
at exports._errnoException (
- C++中三种new的用法
_荆棘鸟_
C++new
转载自:http://news.ccidnet.com/art/32855/20100713/2114025_1.html
作者: mt
其一是new operator,也叫new表达式;其二是operator new,也叫new操作符。这两个英文名称起的也太绝了,很容易搞混,那就记中文名称吧。new表达式比较常见,也最常用,例如:
string* ps = new string("
- Ruby深入研究笔记1
wudixiaotie
Ruby
module是可以定义private方法的
module MTest
def aaa
puts "aaa"
private_method
end
private
def private_method
puts "this is private_method"
end
end
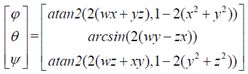
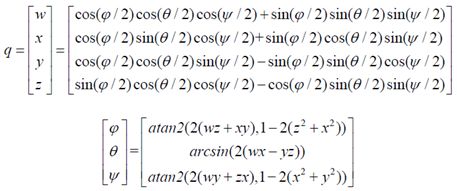
 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。 
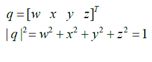
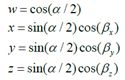
 是绕旋转轴旋转的角度,
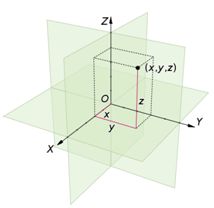
是绕旋转轴旋转的角度, 为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。 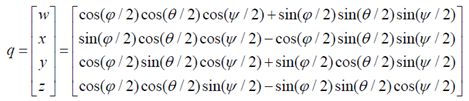
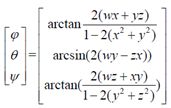
 ,这并不能覆盖所有朝向(对于
,这并不能覆盖所有朝向(对于 角
角 的取值范围已经满足),因此需要用atan2来代替arctan。
的取值范围已经满足),因此需要用atan2来代替arctan。