ROS文件系统
介绍catkin的编译系统,catkin工作空间的创建和结构,package软件包的创建和结构,介绍CMakeLists.txt文件,package.xml以及其他常见文件。
catkin工作空间
Catkin是ROS定制的编译构建系统,对Cmake的扩展
而Catkin工作空间是组织和管理功能包的文件夹,以Catkin工具编译
- 建立工作空间
mkdir -p ~/catkin_ws/src
- 编译
cd ~/catkin_ws/ #回到工作空间
catkin_make
source ~/catkin_ws/devel/setup.bash #编译完后要source刷新环境

catkin编译的工作流程如下:
1 首先在工作空间catkin_ws/src/下递归的查找其中每一个ROS的package。
2 package中会有package.xml和CMakeLists.txt文件,Catkin(CMake)编译系统依据CMakeLists.txt文件,从而生成makefiles(放在catkin_ws/build/)。
3 然后make刚刚生成的makefiles等文件,编译链接生成可执行文件(放在catkin_ws/devel)。
也就是说,Catkin就是将cmake与make指令做了一个封装从而完成整个编译过程的工具。catkin有比较突出的优点,主要是:
- 操作更加简单
- 一次配置,多次使用
- 跨依赖项目编译
Package组成
- ROS软件的基本组成形式
- catkin编译的基本单元
-
一个Package可以包含多个可执行文件(节点)
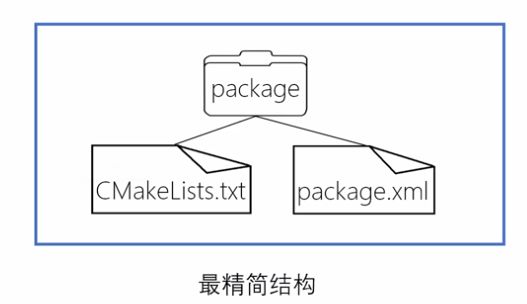 Package最精简结构
Package最精简结构
其中:
- CMakelists.txt规定catkin编译的规则
例如:源文件、依赖项、目标文件
cmake_minimum_required() #指定Catkin最低版本
project() #指定软件包的名称
find_package() #指定编译时需要的依赖项
catkin_python_setup() #catkin新加宏,打开catkin的Python Module的支持
add_message_files() #catkin新加宏,添加自定义Message/Service/Action文件
add_service_files()
add_action_files()
generate_message() #catkin新加宏,生成不同语言版本的msg/srv/action接口
catkin_package() #catkin新加宏,生成当前package的cmake配置,供依赖本包的其他软件包调用
add_library() #生成库
add_executable() #生成可执行二进制文件
add_dependencies() #定义目标文件依赖于其他目标文件,确保其他目标已被构建
target_link_libraries() #链接
catkin_add_gtest() #catkin新加宏,生成测试
install() #生成可安装目标
- Package.xml
定义package的属性
例如:包名、版本号、作者、依赖等
根标记文件
包名
版本号
内容描述
维护者
软件许可证
编译构建工具,通常为catkin
编译依赖项,与Catkin中的
运行依赖项
一般只需要修改

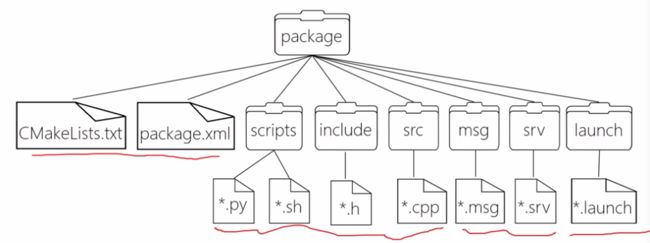
还可以在Package下放自定义的通信格式:
消息(msg)
服务(srv)
动作(action)
以及launch、配置文件
launch文件(launch)、配置文件(yaml)

常用包管理指令
1.rospack
查找某个pkg的地址
rospack find package_name
2.roscd
跳转到某个pkg下
roscd package_name
3.rosls
列举某个pkg下的文件信息
rosls package_name
4.rosed
编辑pkg的文件
rosed package_name file_name
5.catkin_create_pkg
创建一个pkg
catkin_creat_pkg[deps]
6.rosdep
安装某个pkg所需的依赖
rosdep install [pkg_name]
实操步骤
1.创建工作空间
mkdir -p catkin_practice/src
- 初始化工作空间
cd catkin_practice
catkin_make
- 创建功能包
cd src
catkin_create_pkg test1 //不带依赖项
catkin_create_pkg test2 roscpp rospy std_msgs nav_msgs //带依赖项

- 设置环境变量
source devel/setup.bash`
通过设置环境变量,系统将知道功能包放在catkin_practice/devel下 该命令有一个弊端就是,设置的环境变量只会在当前终端下生效,重新打开一个终端将失效
解决方案是:
解决方法是将上述命令放在终端配置文件中。
vi ~/.bashrc
//将环境变量添加只终端设置最后一行
source ~/catkin_practice/devel/setup.bash
在新的终端中输入以下命令,让终端命令在当前终端生效
source ~/.bashrc
检查环境变量
echo $ROS_PACKAGE_PATH
Metapackage
在一些ROS的教学资料和博客里,你可能还会看到一个Stack(功能包集)的概念,它指的是将多个功能接近、甚至相互依赖的软件包的放到一个集合中去。但Stack这个概念在Hydro之后就取消了,取而代之的就是Metapackage。

以上列举了一些常见的功能包集,例如navigation、turtlebot,他们都是用于某一方面的功能,以navigation metapackage(官方介绍里仍然沿用stack的叫法)为例。