AI 八数码A_star算法问题-实验报告
一 题目要求:
八数码问题的A星搜索算法实现
要求:设计估价函数,并采用c或python编程实现,以八数码为例演示A星算法的搜索过程,争取做到直观、清晰地演示算法,代码要适当加注释。
八数码难题:在3×3方格棋盘上,分别放置了标有数字1,2,3,4,5,6,7,8的八张牌,初始状态S0可自己随机设定,使用的操作有:空格上移,空格左移,空格右移,空格下移。试采用A*算法编一程序实现这一搜索过程.
二 构造状态空间:
这个题目的状态空间描述为一组整数对(r,s,t,u,v,w,x,y,z)。
每个字母分别对应八数码的每个位置,如下表所示。
| r | s | t |
|---|---|---|
| u | v | w |
| x | y | z |
表1-八数码状态空间对应关系
三 对题目的理解:
这个题目也应该采用树形结构来解,我觉得难点有二:
- 如何建立每个节点的数据结构;
- 因为是A*算法,所以公式f=g+h启发信息,如何在编程中体现。
这里我是用Python写的算法,结点的数据结构如下:
class Point:
def __init__(self, r, s, t, u, v, w, x, y, z):
self.r = r
self.s = s
self.t = t
self.u = u
self.v = v
self.w = w
self.x = x
self.y = y
self.z = z
self.g = 0
self.f = 0 # f = g+h
self.father = None
self.node = [r, s, t, u, v, w, x, y, z]
首先定义了八数码问题的9个位置的值。比较重要的是Point结点的father属性,指明了子节点与父节点的关系,保证了树形结构的准确性。然后定义了g属性,来保存节点的深度,f属性为g+h的和,这样就保证了启发信息。
- 后来遇到个Python特有的bug,就是def了一个函数,然后传参,就算我用=号复制了一个list,原来的参数也会被改变,因为他们的指针都是一样的。解决方法是用copy.copy(list),这样复制就不是同一个指针了。
四 算法代码:
见报告最后。
五 代码解释:
- 首先定义了open表、closed表,声明了Point类,定义了初始节点init(2, 0, 3, 1, 8, 4, 7, 6, 5)和目的节点(1, 2, 3, 8, 4, 5, 0, 7, 6)。
- 在开始进行A_star(A*)算法之前,先定义几个函数:
1) getKey:找出Point节点中0(即空格)的位置索引;
2) up:空格上移函数。把某节点的空格和上方位置的值交换(考虑了溢出问题,即第一行不能up);
3) down:空格下移函数。同上;
4) left:空格左移函数。同上;
5) right:空格右移函数。同上;
6) h:启发函数。将某个节点与目的节点比较,返回位置不同的数目;
7) equal:判断两个节点是否相同;
8) open_sort:把open表里面的节点,按照属性f的值,排序;
9) in_list:判断节点是否在open表或者closed表已经存在。 - 开始编写A*算法:
1) 首先,先把初始节点init放入到OPEN表中,然后遍历OPEN表;
2) 如果OPEN中取出的节点是目的节点goal,那么结束遍历;否则把这个节点从OPEN表取出,放入CLOUSED表;
3) 然后根据此节点,来得到它的子节点,通过上、下、左、右四个方向来获取四个新节点,然后对四个节点遍历;
4) 把该节点的f属性、father属性、g属性指定好。判断该new节点是否已经出现在open表中,如果已经出现了而且它的f属性值更好,说明它更优,那么把之前的移除,把这个插入。Open表同理。如果该new节点在open表和closed表都没有,那么把它直接插入到open表。最后根据f属性的值,对open表的节点排序。
4 最后打印一下路径,就可显示出解。
六 算法输出分析:
如图1是以初始节点init(2, 0, 3, 1, 8, 4, 7, 6, 5)和目的节点(1, 2, 3, 8, 4, 5, 0, 7, 6)运行的程序输出。根据OPEN表画出树形图如图2。

图1-程序输出
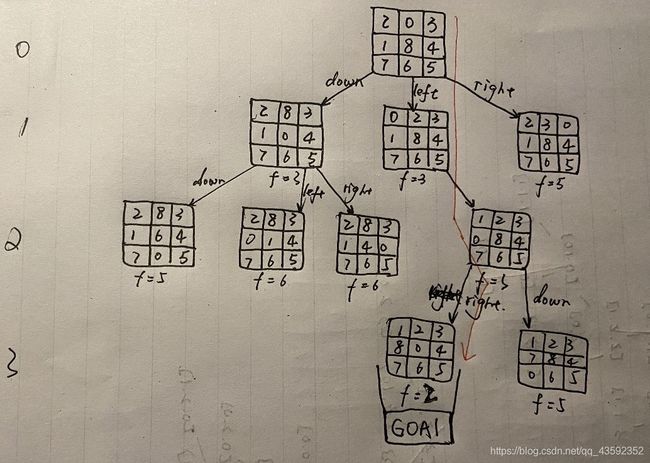
图2-分析过程
附:Python算法
import copy
import operator
OPEN = [] # open表
CLOSED = [] # closed表
class Point:
def __init__(self, r, s, t, u, v, w, x, y, z):
self.r = r
self.s = s
self.t = t
self.u = u
self.v = v
self.w = w
self.x = x
self.y = y
self.z = z
self.g = 0
self.f = 0 # f = g+h
self.father = None
self.node = [r, s, t, u, v, w, x, y, z]
init = Point(2, 0, 3, 1, 8, 4, 7, 6, 5) # 初始节点
goal = Point(1, 2, 3, 8, 0, 4, 7, 6, 5) # 目标
# 返回空位的index值
def getKey(s):
return s.node.index(0)
def up(s, key):
if key - 3 >= 0:
arr = copy.copy(s.node)
arr[key], arr[key - 3] = arr[key - 3], arr[key]
return Point(arr[0], arr[1], arr[2], arr[3], arr[4], arr[5], arr[6], arr[7], arr[8])
else:
return None
def down(s, key):
if key + 3 <= 8:
arr = copy.copy(s.node)
arr[key], arr[key + 3] = arr[key + 3], arr[key]
return Point(arr[0], arr[1], arr[2], arr[3], arr[4], arr[5], arr[6], arr[7], arr[8])
else:
return None
def left(s, key):
if key != 0 and key != 3 and key != 6:
arr = copy.copy(s.node)
arr[key], arr[key - 1] = arr[key - 1], arr[key]
return Point(arr[0], arr[1], arr[2], arr[3], arr[4], arr[5], arr[6], arr[7], arr[8])
else:
return None
def right(s, key):
if key != 2 and key != 5 and key != 8:
arr = copy.copy(s.node)
arr[key], arr[key + 1] = arr[key + 1], arr[key]
return Point(arr[0], arr[1], arr[2], arr[3], arr[4], arr[5], arr[6], arr[7], arr[8])
else:
return None
# 启发函数
def h(s, p=goal):
flag = 0
for i in range(0, 9):
if s.node[i] != p.node[i]:
flag += 1
return flag
def equal(a, b):
if a.node == b.node:
return True
# 将open_list以f值进行排序
def open_sort(l):
the_key = operator.attrgetter('f') # 指定属性排序的key
l.sort(key=the_key)
# 扩展节点时在open表和closed表中找原来是否存在相同属性的节点
def in_list(new, l):
for item in l:
if new.node == item.node:
return True, item
return False, None
def A_star(s):
global OPEN, CLOSED
OPEN = [s]
CLOSED = []
while OPEN: # open表非空
get = OPEN[0] # 取出open表第一个元素get
if get.node == goal.node: # 判断是否为目标节点
return get
OPEN.remove(get) # 将get从open表移出
CLOSED.append(get) # 将get加入closed表
# 以下得到一个get的新子节点new并考虑是否放入OPEN
key = getKey(get)
for i in range(0, 4): # 四个方向
if i == 0:
new = up(get, key)
elif i == 1:
new = down(get, key)
elif i == 2:
new = left(get, key)
elif i == 3:
new = right(get, key)
if new == None: # 状态非法或new折返了
pass
# 如果要拓展的节点满足以上情况,将它的父亲设为当前节点,计算f,并对open_list排序
else:
new.father = get
new.g = get.g + 1 # 与起点的距离
new.f = get.g + h(new) # f = g + h
# 如果new在open表中(只关注m,c,b的值)
if in_list(new, OPEN)[0]:
old = in_list(new, OPEN)[1]
if new.f < old.f: # new的f
OPEN.remove(old)
OPEN.append(new)
open_sort(OPEN)
else:
pass
# 继续,如果new在closed表中
elif in_list(new, CLOSED)[0]:
old = in_list(new, CLOSED)[1]
if new.f < old.f:
# 将old从closed删除,并重新加入open
CLOSED.remove(old)
OPEN.append(new)
open_sort(OPEN)
else:
pass
else:
OPEN.append(new)
open_sort(OPEN)
print('OPEN:')
for o in OPEN:
print(o.node,o.f,o.g)
# 递归打印路径
def printPath(f):
if f is None:
return
printPath(f.father)
print(f.node)
if __name__ == '__main__':
final = A_star(init)
if final:
print('有解,解为:')
printPath(final)
else:
print('无解!')