matlab角点检测fast_openCV - 角点检测快速算法 FAST
目标
在这个章节,
我们将理解FAST算法的基本原理
并在openCV中使用FAST算法的函数.
原理
我们看到了几个特性检测器,其中很多都非常好. 但是从实时应用的角度来看,它们还不够快. 一个很好的例子:比如要在计算资源有限的移动机器人上应用SLAM技术 (即使定位和地图构建技术) 将出现问题。一个解决方案就是采用FAST算法,由Edward Rosten和Tom Drummond在他们2006年的论文《机器学习用于高速拐角检测》中提出(后来在2010年进行了修订)。算法的基本总结如下。
使用 FAST来检测特征
选择图像中的像素
p
作为兴趣点或不作为兴趣点。让它的强度
I p
.
选择合适的阈值
t
.
围绕测试中的像素考虑一个由16个像素组成的圆圈 (如下图所示)
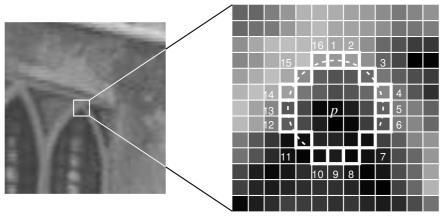
那么像素
p
是一个角点,如果圆圈中有一组相邻的n个像素(为16个像素中的n个),它们的亮度都大于
Ip
+
t
, 或者比
Ip
−
t
暗. (在上图中白色虚线表示). n 为12.
提出了一种排除大量非转角的高速试验方法。这个测试只检查1,9,5和13处的4个像素(先测试1和9处的像素看是否它们太亮或太暗,如果是,那么再检查5和13)。如果
p
是一个角,那么其中至少三个点的亮度必须大于
Ip+t
或比
Ip - t
暗。如果这两者都不是,那么
p
就不能是角。然后通过对圆形中所有像素的检测,将全段测试准则应用到通过的候选对象上。该探测器本身表现出高性能,但有几个弱点:
该算法不会拒绝大量 n < 12 的候选点.
像素的选择不是最优的,因为它的效率取决于问题的排序和角的分布。
快速测试的结果可能被丢弃。
多个特征相邻检测。
前3点是用机器学习方法解决的。最后一个是使用非最大抑制。
机器学习角检测器
选择一组用于培训的图像 (最好来自检测目标范围的图像)
对每一张图像运用 FAST 算法找到特点.
对于每个特征点,将其周围的16个像素存储为一个向量。对所有的图像都这样做,得到特征向量
P
。
这16个像素中的每个像素(比如x)都可以有以下三种状态之一:

5. 根据这些状态,特征向量
P
被细分为三个子集,
Pd, Ps, Pb.
6. 定义一个新的布尔变量
Kp
,如果
p
是一个角,则为真,否则为假。
7. 使用ID3算法(决策树分类器)查询每个子集,使用变量
Kp
查询关于真类。它选择产生最多信息量的x作为是否是角的候选,可以 通过计算
Kp
的熵来度量。
8. 递归地应用于所有子集,直到它的熵为零。
9. 所建立的决策树用于其他图像的快速检测。
非最大值抑制
在相邻位置检测多个兴趣点是另一个问题。采用非最大抑制法求解。
计算一个分数函数,V代表所有检测到的特征点。V是p和周围16个像素值的绝对差值之和。
考虑两个相邻的关键点并计算它们的V值。
Discard t丢弃V值较低的那个。
总结
它比其他现有的角探测器快几倍。
但它对高噪点的图像效果并不好,依赖于阈值设定。
OpenCV中应用FAST
和其它特征检测器一样。假如你想,你可以指定阈值,不管非最大值抑制用不用,邻域都开启。邻域定义了3个标签,cv.FAST_FEATURE_DETECTOR_TYPE_5_8, cv.FAST_FEATURE_DETECTOR_TYPE_7_12 and cv.FAST_FEATURE_DETECTOR_TYPE_9_16. 下面简单的几行代码展示如何使用FAST函数检测和绘制特征点。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('simple.jpg',0)
# Initiate FAST object with default values
fast = cv.FastFeatureDetector_create()
# find and draw the keypoints
kp = fast.detect(img,None)
img2 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
# Print all default params
print( "Threshold: {}".format(fast.getThreshold()) )
print( "nonmaxSuppression:{}".format(fast.getNonmaxSuppression()) )
print( "neighborhood: {}".format(fast.getType()) )
print( "Total Keypoints with nonmaxSuppression: {}".format(len(kp)) )
cv.imwrite('fast_true.png',img2)
# Disable nonmaxSuppression
fast.setNonmaxSuppression(0)
kp = fast.detect(img,None)
print( "Total Keypoints without nonmaxSuppression: {}".format(len(kp)) )
img3 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
cv.imwrite('fast_false.png',img3)
看结果,左边和右边分别显示开启和不开起非最大值抑制的效果:
