SLAM练习题(八)——单应矩阵
计算机视觉life从零开始一起学习SLAM 学习笔记
文章目录
- 单应矩阵
- 总结:
单应矩阵
以下题目来自计算机视觉life从零开始一起学习SLAM系列
题目: 利用OpenCV编程实现虚拟广告牌的效果。提供两张图,一张是“计算机视觉life”公众号的logo,另外一张是带广告牌的原图,请用单应矩阵实现将原图中广告牌替换为提供的logo的效果。要求通过鼠标点击来选择要替换的广告牌的四个顶点。
代码框架及图片见: 链接:https://pan.baidu.com/s/1uRsBJWahU7uQ7nOk1R49ow 密码:xn5l
参考答案:
#include 效果:

附:CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(012_practice)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-std=c++11")
# 添加OpenCV
find_package(OpenCV REQUIRED)
include_directories(${
OpenCV_INCLUDE_DIRS})
add_executable(virtual-billboard virtual-billboard.cpp)
target_link_libraries(virtual-billboard ${
OpenCV_LIBS})
总结:
单应矩阵:单应矩阵描述的就是同一个平面的点在不同图像之间的映射关系。参考
( u 1 v 1 1 ) = M 1 ( x w y w 1 ) , ( u 2 v 2 1 ) = M 2 ( x u y w 1 ) ( u 2 v 2 1 ) = M 2 M 1 − 1 ( u 1 v 1 1 ) = H ( u 1 v 1 1 ) \begin{array}{l} \left(\begin{array}{l} u_{1} \\ v_{1} \\ 1 \end{array}\right)=M_{1}\left(\begin{array}{c} x_{w} \\ y_{w} \\ 1 \end{array}\right),\left(\begin{array}{l} u_{2} \\ v_{2} \\ 1 \end{array}\right)=M_{2}\left(\begin{array}{c} x_{u} \\ y_{w} \\ 1 \end{array}\right) \\ \left(\begin{array}{l} u_{2} \\ v_{2} \\ 1 \end{array}\right)=M_{2} M_{1}^{-1}\left(\begin{array}{c} u_{1} \\ v_{1} \\ 1 \end{array}\right)=H\left(\begin{array}{c} u_{1} \\ v_{1} \\ 1 \end{array}\right) \end{array} ⎝⎛u1v11⎠⎞=M1⎝⎛xwyw1⎠⎞,⎝⎛u2v21⎠⎞=M2⎝⎛xuyw1⎠⎞⎝⎛u2v21⎠⎞=M2M1−1⎝⎛u1v11⎠⎞=H⎝⎛u1v11⎠⎞
H的自由度为8,所以4对点就能求出H。
遇到新函数要勤查OpenCV的文档,感觉OpenCV文档也是做的比较用心,函数解释的相当清楚。这里放几个OpenCV的函数:
- 透视变换函数
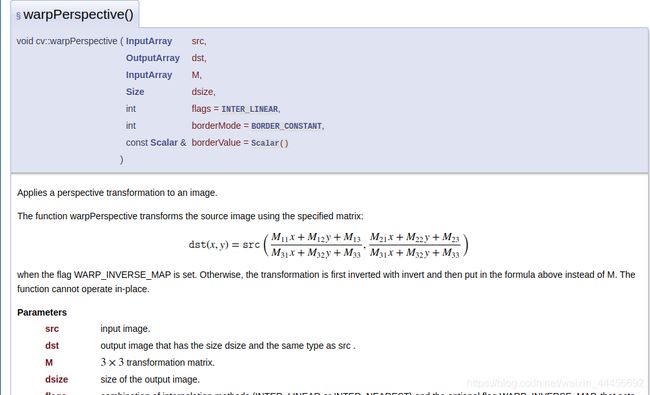
根据提供的四对点以及相应的单应矩阵H,进行透视变换。函数文档里面把计算公式都写出来了。
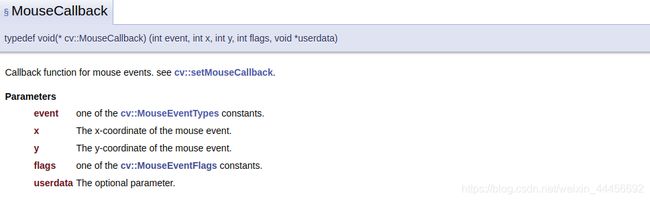
- 鼠标回调函数
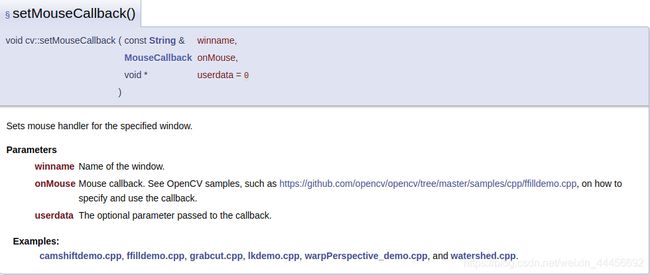
参数 :要控制的窗口,onMouse是回调函数,格式如下:
多查文档!
参考:
从零开始一起学习SLAM | 神奇的单应矩阵