用深度强化学习玩atari游戏_用 Python 写出了一个 Gameboy 模拟器
优质文章,第一时间送达!

感觉用 Atari 游戏研究人工智能有点「不够接地气」?现在我们可以使用 Gameboy 模拟器了。
作者:机器之心编辑部
对于很多 80 后、90 后来说,任天堂 Gameboy 代表了青春的很大一部分。很多我们耳熟能详的游戏都是最初搭载在这款 8 位游戏掌机上的,包括鼎鼎有名的《马里奥》、《塞尔达》系列。对于国内玩家来说,我们玩得最多的则应该是《口袋妖怪》系列了。
这款游戏机距离首次发布已过去了 30 年时间,不过人们对于它的热情却丝毫不减。昨天,一款利用 Python 编写的 Gameboy 模拟器在社交网络上吸引了人们的广泛关注。

爷的青春回来了?作者在 Reddit 上发出的帖子迅速获得了上千点赞。
该项目的作者之一 Mads Ynddal 宣布,PyBoy 的 1.0 版正式发布。
PyBoy 是什么?

简而言之,它是一个完全用 Python 从头开始编写的 Game Boy 模拟器,并且支持通过 API 编写脚本。研究者添加了类型定义,使其可以使用 Cython 编译软件,从而获得与用 C 和 C++编写的模拟器相媲美的性能。
项目链接:https://github.com/Baekalfen/PyBoy
特点
PyBoy 被设计成通过 Python 访问,因此支持并鼓励人们做实验研究,机器人和人工智能在作此尝试。研究者正在构建游戏特定的包装器,目前,包装器可让程序员与俄罗斯方块和超级玛丽进行交互,而不需要对 Game Boy 有深入的了解。可以参考该文档:https://docs.pyboy.dk。
项目作者还想学习和尝试更多奇特的功能,根据大学项目的研究,他们向模拟器添加了倒回功能,也就是说,您可以在任何游戏中倒回时间。
PyBoy 模拟器架构
1990 年,任天堂为 Game Boy 申请了专利。下图展示了该专利中 CPU、RAM、盒带和显示屏之间的集成与连接。
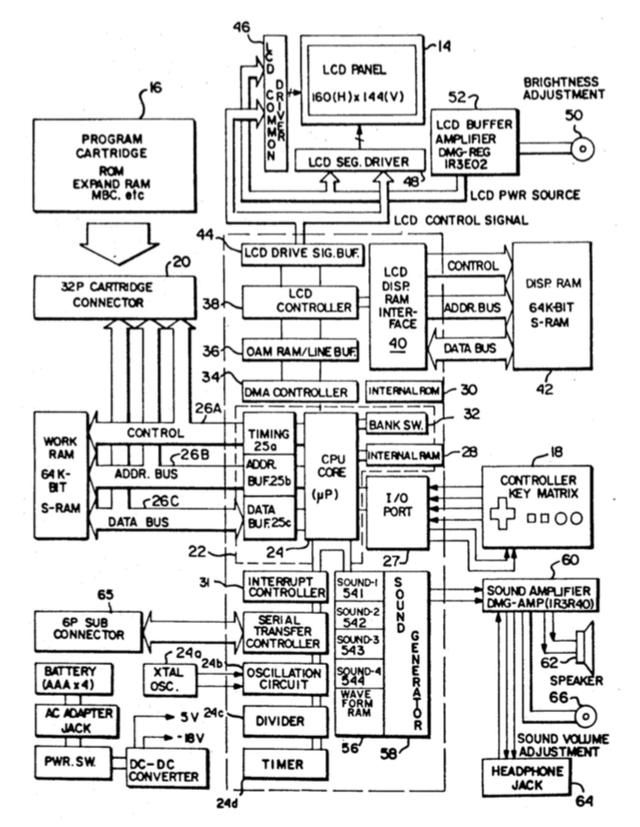
Game Boy 专利中的架构图。
PyBoy 项目成员基于此在 Python 中为每个组件制定类(class),从而在「主机系统」上为「客户系统」搭建了基础(系统运行 Python)。该客户系统就是虚拟的 Game Boy 硬件,理论上它能够运行为 Game Boy 编写的每一个软件部分。
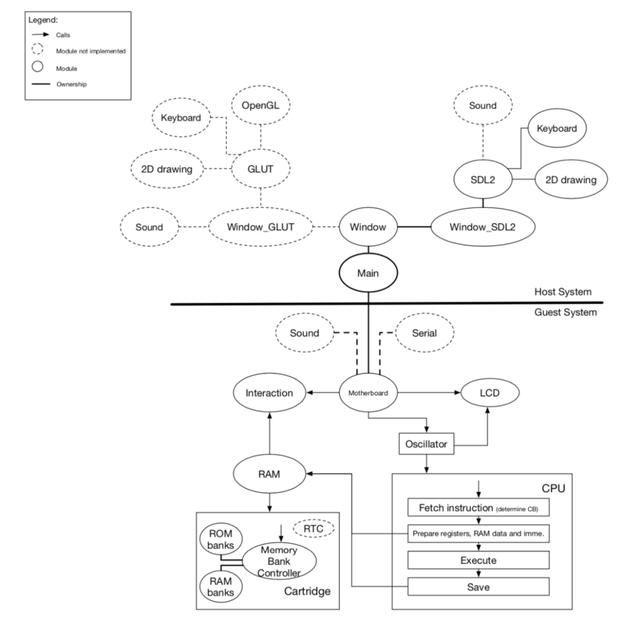
下图展示了 PyBoy 模拟器中所有类及其关系:
PyBoy 对强化学习的意义以及与其他环境的比较
这些年来,已有很多人开发过 Gameboy 模拟器,现在的电脑和手机上都有可运行的工具。为什么要用 Python 来写一款呢?当然是用来训练人工智能的。
想打游戏?Gameboy 对于现在的人来说恐怕有点「难以上手」。
最接近通用人工智能的方法——强化学习
通用人工智能这一概念指的是机器能够成功完成任意一件人类能够做到的智力型任务。目前我们对 AI 的研究距离这一目标还差很远的距离,吴恩达之前就表示过,深度学习做的仅是高维的「curve fitting」。
不同于那些依靠预先收集数据(甚至需要大量人工标记)的机器学习算法,强化学习是一种仅通过环境奖赏进行训练的算法,其工作机制类似于人体内部的多巴胺系统。强化学习是目前最接近于人类从经验中学习这一能力的机器学习算法,尤其适用于智能体需要根据其所处环境进行决策的情景。
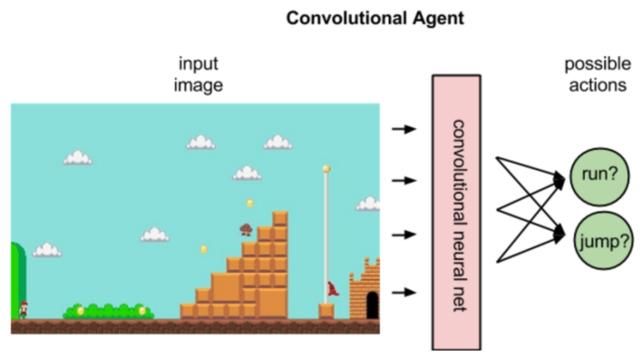
下图展示了 RL 智能体是如何仅以游戏图像作为输入,来学习马里奥控制策略的。
为什么大量关于 RL 的研究都在 Atari 上进行,而不是其他更实际的问题?
关于 RL 的研究使用 Atari 作为基准的原因主要有如下几点:
Atari 环境能够让我们使用相同的算法测试多个不同的环境,验证 RL 算法的通用性;
由于输入仅为游戏图像,增加了问题的复杂性;
Atari 为研究人员提供了一个公认的测试平台,能够较为公平地比较不同算法之间的性能;
RL 需要大量的交互数据进行学习,在真实环境中实际测试之前,Atari 为算法的初期验证提供了一个安全、快速、低成本的测试平台。
下图为一些 Atari 环境的展示:
Atari、PySC2 之类环境与 PyBoy 对比
上一小节介绍了在 Atari 环境中训练 RL 智能体的诸多优势,然而随着 RL 的发展,这一相对较简单的环境逐渐不再适用于目前新的 RL 研究。不久之前,由 DeepMind 提出的 Agent57 在所有 Atari 环境中表现均超越了人类玩家平均水平,也预示着在 Atari 环境上的 RL 研究逐渐进入尾声。
更困难环境有诸如 DeepMind 与暴雪合作的 PySC2,需要智能体学会复杂的协同、对抗策略。虽然 AlphaStar 在这一环境中取得了令人瞩目的成果,但仍存在很多亟待解决的问题。以下为 PySC2 环境示意图。

PyBoy 环境的难度可以说介于 Atari 与 PySC2 之间,它为我们提供了一个验证 RL 性能的新基准。在将 RL 应用于更复杂的实际问题之前,我们可以先在这一难度适中的环境中进行低成本、高效的测试。
就像特斯拉的人工智能和自动驾驶视觉总监 Andrej Karpathy 说的,「One should always try a BB gun before reaching for the Bazooka.」
Github 介绍
如何安装?
如果已经配置了一个能够正常运行 Python 的环境,那么安装会非常简单:
通过软件包管理器安装 SDL2(sudo apt install libsdl2-dev 或是 brew install sdl2)
使用 pip install pyboy 安装 Pyboy
可以直接从终端 $ pyboy file.rom 使用 PyBoy 或者在 Python 脚本中使用:
from pyboy import PyBoypyboy = PyBoy('ROMs/gamerom.gb')while not pyboy.tick:pass
该项目同时支持 macOS, Raspberry Pi (Raspbian), Linux (Ubuntu), 以及 Windows 10.
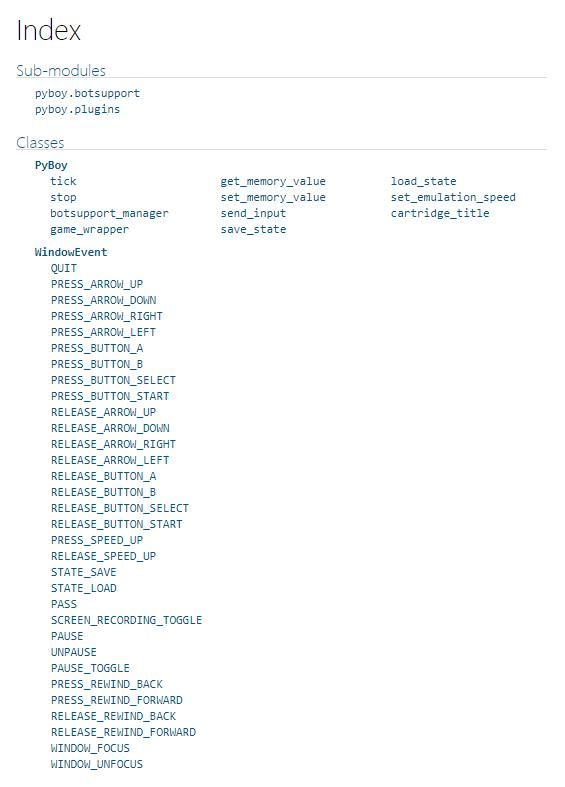
PyBoy API 文档
如果用户需要创建一个自己的机器人或者是 AI,可以在 PyBoy Documentation (https://baekalfen.github.io/PyBoy/index.html) 找到所有用以支持的外部组件,其中各种类及其用法都非常详细,这里不再一一赘述。(如下图结构索引)
简短示例
PyBoy 可以作为 Python 中的对象加载。所以它可以从另一个脚本进行初始化,并可以由该脚本控制和探测。看一下 gamewrapper_tetris.py 上一个粗糙的「机器人」,正在与游戏进行交互。当然,所有的外部组件都可以在 PyBoy 文档中找到。
对于一般的 Game Boy 文档,可以查看 Pan Docs,其中包含了每个主题的详细信息。
以下是从屏幕读取数据的简短演示,该代码也可以在 gamewrapper_mario.py 中找到:
import osimport sysfrom pyboy import PyBoy, WindowEvent# Makes us able to import PyBoy from the directory belowfile_path = os.path.dirname(os.path.realpath(__file__))sys.path.insert(0, file_path + "/..")# Check if the ROM is given through argvif len(sys.argv) > 1:filename = sys.argv[1]else:print("Usage: python mario_boiler_plate.py [ROM file]")exit(1)quiet = "--quiet" in sys.argvpyboy = PyBoy(filename, window_type="headless" if quiet else "SDL2