点云配准2:icp算法在PCL1.10.0上的实现+源码解析
目录
- 本文最后实现的配准实例
- 点云配准系列
- 准备
- 程序结构
-
- 主程序
-
- 1、为什么要降采样
- 2、体素降采样原理
- 3、点云更新
- icp
-
- 配准前的参数设置
- icp配准算法内部
-
- 对应点对确定(determineCorrespondences)
- 变换矩阵求解estimateRigidTransformation
- 算法是否应该停止判定converged_ = static_cast ((*convergence_criteria_));
- 主程序代码
- 完整工程在此
- 参考及感谢
- 完
本文最后实现的配准实例
点云配准系列
点云配准1:配准基础及icp算法
点云配准2:icp算法在PCL1.10.0上的实现+源码解析
点云配准3:3d-ndt算法在pcl上的实现以及参数设置
点云配准4:cloudcompare的使用以及点云配准功能
点云配准5:4pcs算法在pcl上的实现
点云配准6:tricp算法在pcl上的实现
点云配准论文阅读笔记–Efficient Variants of the ICP Algorithm
点云配准论文阅读笔记–Comparing ICP variants on real-world data sets
点云配准论文阅读笔记–(4PCS)4-Points Congruent Sets for Robust Pairwise Surface Registration
点云配准论文阅读笔记–3d-dnt博士论文
准备
本实例是在visual studio2019+pcl1.10.0上进行,环境配置方法在之前的博客已进行详细说明:
vs2019配置pcl1.10.0+点云可视化示例
程序结构
主程序

可视化:

(上述关系图的生成工具:mindmaster)
几个说明
1、为什么要降采样
将上万的点降采样至几百个,能大幅提升算法的速度。因为几百个点的运算,与几万个点的运算比,速度差异是巨大的。
2、体素降采样原理
通过输人的点云数据创建一个三维体素栅格(可把体素栅格想象为微小的空间三维立方体的集合),然后在每个体索(即边长为m、n、o的三维小立方体)内,用体索中所有点的重心来近似显示体素中其他点,这样该体素内所有点就用一个重心点最终表示。这样确实可以减少点云的数据量,并且像对于斯坦福兔子点云模型这样不含噪点的模型来说,体素降采样后的点云配准速度大大提升。本文代码中的体素使用0.01x0.01x0.01的立方体。
3、点云更新
降采样点云只是用来参与运算从而获得变换矩阵,未降采样的点云的配准才是我们需要的,因此每次得到的矩阵还要用于去更新未降采样的源点云。
icp

配准前的参数设置
代码里面的MSE:
MSE是两点云距离的均方误差,是 每个点云的距离之和 除以点对 所得到的值
下文中的pre_mse为上一次迭代的mse
上述关系图中只使用了一个配准时可以设置的参数,实际上可以使用的还有这些
icp.setEuclideanFitnessEpsilon(0.00001);// 0.001% of the previous MSE (relative error) (registration.h)
icp.convergence_criteria_->setAbsoluteMSE(1e-6);//(default——convergence_criteria.h)
icp.convergence_criteria_->setMaximumIterationsSimilarTransforms(3);//(default——convergence_criteria.h)
icp.setMaxCorrespondenceDistance(1);//对应点间的最大距离(单位为m)(registration.h)
icp.setMaximumIterations(iterations);//最大迭代次数,超过这个次数,无论算法有没有找到最优解都停止
其中:
1、icp.setEuclideanFitnessEpsilon(0.00001);
abs(pre_mse-mse)/mse来与0.00001作比较,如果小于0.00001则可认为两次迭代已经很接近了,可能已经达到最优解了
2、icp.convergence_criteria_->setAbsoluteMSE(1e-6);
abs(pre_mse-mse)两次迭代的绝对差,小于1e-6可认为两次迭代已经很接近了,可能已经达到最优解了
3、icp.convergence_criteria_->setMaximumIterationsSimilarTransforms(3);
当上述两个判定连续3次都是满足的,那么认为算法已经找到最优解
icp配准算法内部
在主程序icp.align()处加断点,然后F11进入单步调试。

icp.align()是配准的入口,在registration.hpp中

首先是初始化
initCompute ()是初始化函数,会在里面对目标点云建立kd树搜索
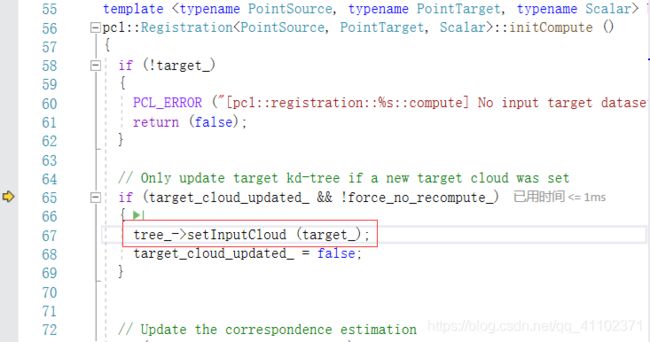
后面是其他一些初始化,就不一一细讲
到computeTransformation (output, guess);

进入配准的下一步
computeTransformation ()在icp.hpp里面

接着对我们在主函数里面设置的参数赋值给收敛准则convergence_criteria_

下面是个do…while语句,意在执行一次配准,再判定是否满足算法停止条件,不满足则继续迭代,
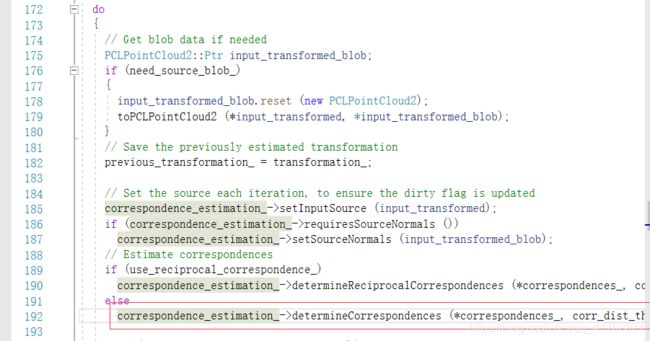
correspondence_estimation_->setInputSource (input_transformed);中的input_transformed会在每次迭代完成后由求得的变换矩阵进行更新
correspondence_estimation_->determineCorrespondences (*correspondences_, corr_dist_threshold_);是查找待配准点云在目标点云中的对应最近邻点对,查找的结果放在correspondences_中
接着就是用对应点对(correspondences_)+待配准点云(input_transformed)+目标点云(target_)进行变换矩阵的求解
求解到的变换矩阵放在transformation_里
然后用transformCloud()函数以变换矩阵transformation_对待配准点云(input_transformed)进行更新
迭代次数+1
while判定是否满足算法停止条件,若不满足则继续执行以上步骤

对应点对确定(determineCorrespondences)
correspondence_estimation_->determineCorrespondences ();函数在correspondence_esitimation.hpp中

核心的部分在此,在for循环里面查找每个点在目标点云中的最近点,并计算距离,若距离大于设定的阈值,则拒绝这个点对,否则将对应点对放入correspondences

变换矩阵求解estimateRigidTransformation
estimateRigidTransformation在transformation_esitimation_svd.hpp中

进入estimateRigidTransformation()函数,内部是使用svd分解的算法进行变换矩阵的求解(pcl::umeyama()函数),有兴趣的可以单步执行进去查看实现的源码,这里主要探究icp的实现过程,对此不深究。,
算法是否应该停止判定converged_ = static_cast ((*convergence_criteria_));
pcl::registration::DefaultConvergenceCriteria::hasConverged ()在default_convergence_criteria.hpp中
主要是判定迭代次数是否达到设定阈值,相对mse、绝对mse是否小于设定阈值等
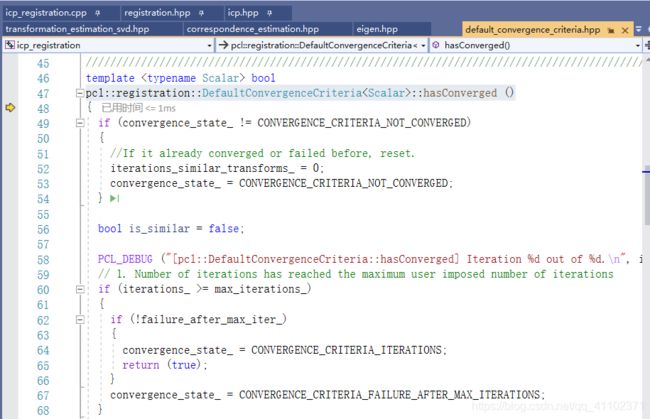
并返回收敛状态

enum ConvergenceState
{
CONVERGENCE_CRITERIA_NOT_CONVERGED,//0还未收敛
CONVERGENCE_CRITERIA_ITERATIONS,//1超过最大迭代次数
CONVERGENCE_CRITERIA_TRANSFORM,//2变换矩阵已经相似
CONVERGENCE_CRITERIA_ABS_MSE,//3absolute_mse已满足
CONVERGENCE_CRITERIA_REL_MSE,//4relative_mse已满足
CONVERGENCE_CRITERIA_NO_CORRESPONDENCES,//5对应点太少(小于3)
CONVERGENCE_CRITERIA_FAILURE_AFTER_MAX_ITERATIONS//6
};
主程序代码
icp源码涉及太多,这里不给出,可自己在pcl点云库查看,或者自己单步调试看每一步的执行过程
以下给出主程序代码,每句代码均已加上注释
#include 完整工程在此
share_noel/PCL/icp/202011icp_registration-Carlos_Lee.zip
https://pan.baidu.com/s/1IsN2Ze2FNts-3v4ZH1m-9A 提取码: mack
愿意用c币支持的朋友也可在此下载:
202011icp_registration-Carlos_Lee.zip
(上述下载链接中csdn与网盘的文件完全相同,只不过网盘免费下载)
参考及感谢
郭浩, 朱德海, 苏伟, 王可. 点云库PCL从入门到精通. 北京: 机械工业出版社; 2019.
点云配准一:配准基础及icp算法
vs2019配置pcl1.10.0+点云可视化示例
利用SVD求得两个对应点集合的旋转矩阵R和转移矩阵t的数学推导
由空间三对点求解两个坐标系之间的变换矩阵
【PCL学习】点云配准——ICP
完
边学边用,如有错漏,敬请指正
--------------------------------------------------------------------------------------------诺有缸的高飞鸟202011