基于stm32智能门锁系统
目录
-
- 一、项目背景
- 二、项目功能要求
- 三、元件购买地址
- 四、开发项目
-
- 2、项目简介
- 3、蓝牙模块
-
-
- ①、连接蓝牙
- ②注意事项
- ③、设置为主模块的步骤
-
- ④、蓝牙代码
-
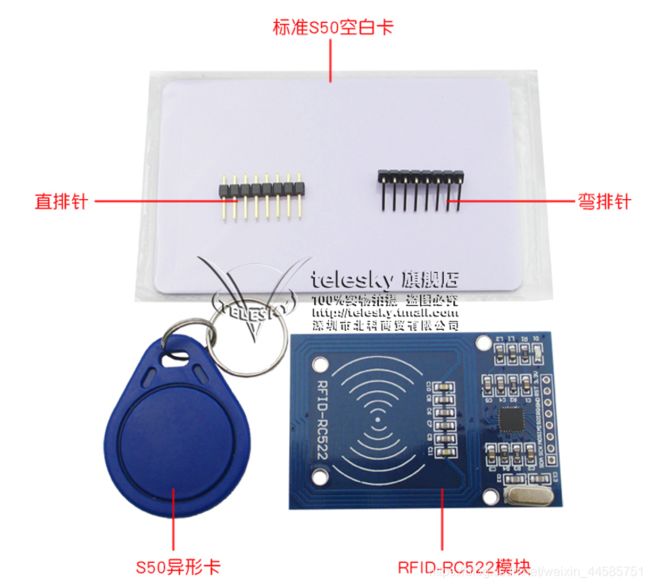
- 4、RFID
-
-
- ①、在使用之前,需要将弯排针焊接在RFID-RC522模块上,找准RFID的接口与开发板连接。
- **② 主要指标**
- **③、RFID代码**
-
- 5、指纹模块
-
-
- ①AS608原理图
- ②、PCB图
- ③、 ATK-AS608 指纹识别模块简介
- ④、引脚介绍
- ⑤、代码实现
-
- 6、OLED显示屏模块
-
-
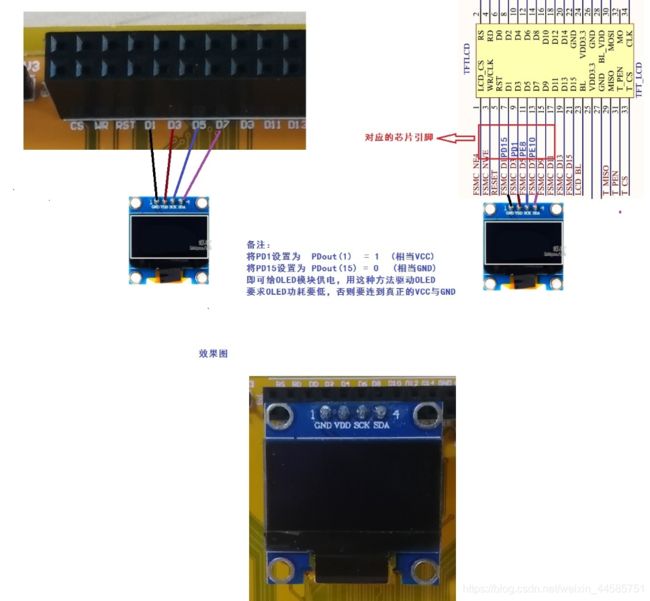
- ①接线图
- ② OLED 简介:
- ③、IIC 电路连接
- ④、代码实现
-
- 7、 4x4按键
-
-
- ①按键原理图
- ②、代码实现
-
- 9、项目总结
一、项目背景

二、项目功能要求
1、可通过指纹模块增删查改家庭成员的指纹信息,增删查改是否成功的相关信息显示在OLED屏幕上
2、在指纹匹配过程中,如果采集的指纹与指纹模块库相匹配,OLED显示匹配成功,并转动步进电机一圈
3、可通过按键设定智能门锁密码,密码可设置为两个(密码六位),如果匹配两个中的一个成功,即可开锁,也可通过按键修改密码,所有的操作过程显示于OLED中
4、实现RFID与手机解锁
三、元件购买地址
1、继电器(锁)
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-14787471870.9.1a966865lNZF6d&id=577356377112
2、4X4按键
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-14787471870.9.40f96865MfVG6C&id=563379889617
3、指纹模块
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-14787471870.9.16d06865bduv8I&id=563705918850
4、OLED(IIC)
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-14787471870.15.44806865TkULtt&id=575274211818(白色)
5、蓝牙
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-14787471870.13.471b6865OLuSU6&id=560220493066
四、开发项目
2、项目简介
模块使用:通过获取4x4按键来实现不同功能。本项目使用道IIC协议、SPI协议、RFID读卡模块、蓝牙模块、4x4按键、AS608指纹模块、OLED显示屏模块、STM32F4107开发板。
3、蓝牙模块
①、连接蓝牙

②注意事项
按住蓝牙模块的按键,再将USB转TTL插入电脑,插入电脑后,蓝牙模块的LED灯处于慢闪状态(慢闪状态表示处于AT指令操作模式)快闪处于数据透传模式(透传相当数据无障碍传输)
③、设置为主模块的步骤
①、 PIO11 置高。(根据自己的引脚接线)
②、上电,模块进入 AT 命令响应状态。
③、超级终端或其他串口工具,设置波特率 115200,数据位 8 位,停止位 1 位,无校验位,
无流控制。
④、串口发送字符“AT+ROLE=1\r\n”,成功返回“OK\r\n”,其中\r\n 为回车换行。
⑤、 PIO 置低,重新上电,模块为主模块,自动搜索从模块,建立连接。
⑥、修改蓝牙设备名称:AT+NAME=贵哥\r\n ——设置模块设备名为:“贵哥”
⑦、模块蓝牙设备地址: 00:02:72:od:22:24,设备名称为: Bluetoothat+rname? 0002, 72, od2224\r\n
+RNAME:Bluetooth
OK
⑧、手机下载”蓝牙调试器“APP,即可通过手机控制开发板的设备
④、蓝牙代码
/*
PB10 -- TX
PB11 -- RX
*/
/**************************************
通过串口3,接收手机发送的指令,传递给蓝牙模块,蓝牙收到指令
后,做出相应的动作,然后将指令通过串口3传递给开发板,执行指令操作。
************************************/
void Usart3_Init(void)
{
//结构体
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//使能串口3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//使能GPIO B组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//PB10引脚映射到串口3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3);
//PB11引脚映射到串口3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; //引脚10 11
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //输出推挽
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //输出速度
//3、初始化IO口为复用功能输出。
GPIO_Init(GPIOB, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 57600; //一般设置为 9600;
USART_InitStruct.USART_WordLength = USART_WordLength_8b; //字长为 8 位数据格式
USART_InitStruct.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStruct.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件控制流
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 全双工
//初始化串口
USART_Init(USART3, &USART_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = USART3_IRQn; //中断通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x01; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x01; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //中断通道使能
//3、启定时器中断,配置NVIC。
NVIC_Init(&NVIC_InitStruct);
//开启中断,接收到数据中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
USART_Cmd(USART3, ENABLE);
}
/*
通过触发中断服务函数,来执行蓝牙模块的指令(中断服务函数不需要调用,写好就行)
*/
//串口3中断服务函数
void USART3_IRQHandler(void)
{
char Usart_Data;
//若是非空,则返回值为1,与RESET(0)判断,不相等则判断为真
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
//判断为真后,为下次中断做准备,则需要对中断的标志清零
USART_ClearITPendingBit(USART3,USART_IT_RXNE);
/* DR读取接受到的数据*/
buffer[count++] = USART_ReceiveData(USART3);
if(buffer[count-1] == '.') //接受到一串字符串
{
//将有数据(去掉:)赋值到rx_buffer当中
for(rx_i = 0; rx_i < (count-1); rx_i++)
{
rx_buffer[rx_i] = buffer[rx_i];
}
rx_flag = 1; //接受完毕标志
count = 0; //以便下次字符串从buffer[0]开始存储
memset(buffer, 0, sizeof(buffer));
}
}
}
//手机开门
void Phone_Open_Door(void)
{
// Usart3_Init(); //调用串口3
OLED_ShowStr(20,3,(unsigned char *)"Enter Comment!!",2);//测试8*16字
// USART_Cmd(USART3, ENABLE); //使能串口3
if(rx_flag == 1)
{
printf("rx_buffer = %s\n", rx_buffer);
//亮灯
if(strcmp(rx_buffer, "open_door") == 0)//如果手机蓝牙输入的指令也是open_door,则触发中断,实现开门
{
GPIO_ResetBits(GPIOF, GPIO_Pin_10);
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(20,3,(unsigned char *)"Open Success!!!",2);//测试8*16字
delay_ms(500);
}
else
{
GPIO_SetBits(GPIOF, GPIO_Pin_10);
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(20,3,(unsigned char *)"Error !!",2);//测试8*16字
delay_ms(500);
}
memset(rx_buffer, 0, sizeof(rx_buffer));
rx_flag = 0;
}
}
4、RFID
①、在使用之前,需要将弯排针焊接在RFID-RC522模块上,找准RFID的接口与开发板连接。
② 主要指标
. 容量为 8K 位 EEPROM
. 分为 16 个扇区,每个扇区为 4 块,每块 16 个字节,以块为存取单位
. 每个扇区有独立的一组密码及访问控制
. 每张卡有唯一序列号,为 32 位
. 具有防冲突机制,支持多卡操作
. 无电源,自带天线,内含加密控制逻辑和通讯逻辑电路
. 数据保存期为 10 年,可改写 10 万次,读无限次
. 工作温度: -20℃ ~50℃ (湿度为 90%)
. 工作频率: 13.56MHZ
. 通信速率: 106 KBPS
. 读写距离: 10 cm 以内(与读写器有关)
③、RFID代码
//.c文件
#include "MFRC522.h"
#include "sys.h"
#include "delay.h"
#include .h文件
//
#ifndef _MFRC522_H_
#define _MFRC522_H_
#include "stm32f4xx.h"
//
//定义MFRC522的CS引脚操作,x=1时CS=1,x=0时CS=0
#define MFRC522_CS(x) x ? GPIO_SetBits(GPIOD,GPIO_Pin_14):GPIO_ResetBits(GPIOD,GPIO_Pin_14)
#define MFRC522_Rst(x) x ? GPIO_SetBits(GPIOE,GPIO_Pin_15):GPIO_ResetBits(GPIOE,GPIO_Pin_15)
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define RFU1C 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegH 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/
//和MF522通讯时返回的错误代码
/
#define MI_OK 0
#define MI_NOTAGERR 1
#define MI_ERR 2
//
#define MAX_LEN 18
//#define F_CS PDout(14)
#define SCK PDout(0)
#define MISO PEin(9)
#define MOSI PEout(7)
//MFRC522 test
u8 MFRC522Test(void);
extern u8 irq_regdata;
extern u16 wait_count;
extern u8 error_regdata;
extern u8 last_bitsdata;
//void MFRC522Test(void);
void Delay1_us(vu16 count);
void STM32_SPI3_Init(void);
void SPI2_Send(u8 val);
u8 SPI2_Receive(void);
void SPI3_Send(u8 val);
u8 SPI3_Receive(void);
void MFRC522_Initializtion(void);
void Write_MFRC522(u8 addr, u8 val);
u8 Read_MFRC522(u8 addr);
void SetBitMask(u8 reg, u8 mask);
void ClearBitMask(u8 reg, u8 mask);
void AntennaOn(void);
void AntennaOff(void);
void MFRC522_Reset(void);
void MFRC522_Init(void);
u8 MFRC522_ToCard(u8 command, u8 *sendData, u8 sendLen, u8 *backData, u16 *backLen);
u8 MFRC522_Request(u8 reqMode, u8 *TagType);
u8 MFRC522_Anticoll(u8 *serNum);
void CalulateCRC(u8 *pIndata, u8 len, u8 *pOutData);
u8 MFRC522_SelectTag(u8 *serNum);
u8 MFRC522_Auth(u8 authMode, u8 BlockAddr, u8 *Sectorkey, u8 *serNum);
u8 MFRC522_Read(u8 blockAddr, u8 *recvData);
u8 MFRC522_Write(u8 blockAddr, u8 *writeData);
void MFRC522_Halt(void);
//
#endif
5、指纹模块
①AS608原理图
②、PCB图

③、 ATK-AS608 指纹识别模块简介
④、引脚介绍

根据自己的开发板,选择引脚的连接
⑤、代码实现
.c文件
#include //.h文件
#ifndef __AS608_H
#define __AS608_H
#include 6、OLED显示屏模块
①接线图
(再次声明,我的开发板是基于STMF4 107系列,要根据自己的开发板来连接)
② OLED 简介:
③、IIC 电路连接
GND: 电源地
VCC: 2.2V~5.5V
SCL: CLK 时钟 (高电平 2.2V~5.5V)
SDA: MOSI 数据 (高电平 2.2V~5.5V)
(注意事项:
OLED 显示屏不同于 LCD,OLED 上电是没有反应的,需要程序驱动才会有显示!)
④、代码实现
//.c文件
//因为我是项目需要,所以会有多个函数,起始都大同小异,还有,需要使用取字模软件,来实现汉字的显示
/************************************************************************************
* Copyright (c), 2014, HelTec Automatic Technology co.,LTD.
* All rights reserved.
*
* Http: www.heltec.cn
* Email: [email protected]
* WebShop: heltec.taobao.com
*
* File name: OLED_I2C.c
* Project : HelTec.uvprij
* Processor: STM32F103C8T6
* Compiler : MDK fo ARM
*
* Author : 小林
* Version: 1.00
* Date : 2014.4.8
* Email : [email protected]
* Modification: none
*
* Description:128*64点阵的OLED显示屏驱动文件,仅适用于惠特自动化(heltec.taobao.com)的SD1306驱动IIC通信方式显示屏
*
* Others: none;
*
* Function List:
* 1. void I2C_Configuration(void) -- 配置CPU的硬件I2C
* 2. void I2C_WriteByte(uint8_t addr,uint8_t data) -- 向寄存器地址写一个byte的数据
* 3. void WriteCmd(unsigned char I2C_Command) -- 写命令
* 4. void WriteDat(unsigned char I2C_Data) -- 写数据
* 5. void OLED_Init(void) -- OLED屏初始化
* 6. void OLED_SetPos(unsigned char x, unsigned char y) -- 设置起始点坐标
* 7. void OLED_Fill(unsigned char fill_Data) -- 全屏填充
* 8. void OLED_CLS(void) -- 清屏
* 9. void OLED_ON(void) -- 唤醒
* 10. void OLED_OFF(void) -- 睡眠
* 11. void OLED_ShowStr(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize) -- 显示字符串(字体大小有6*8和8*16两种)
* 12. void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N) -- 显示中文(中文需要先取模,然后放到codetab.h中)
* 13. void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]) -- BMP图片
*
* History: none;
*
*************************************************************************************/
#include "OLED_I2C.h"
#include "delay.h"
#include "codetab.h"
#include "sys.h"
void I2C_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct; //结构体
//使能GPIO D E组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_15; //引脚1 15
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //输出推挽
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //输出速度
GPIO_Init(GPIOD, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_10; //引脚8 10
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //输出推挽
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //输出速度
GPIO_Init(GPIOE, &GPIO_InitStruct);
//电源供电
PDout(1) = 1;
PDout(15) = 0;
//总线空闲
OLED_SCL = 1;
OLED_SDA_OUT = 1;
}
//引脚模式变更
void OLED_Iic_Sda_Mode(GPIOMode_TypeDef mode)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //第10号引脚
GPIO_InitStructure.GPIO_Mode = mode; //输入/输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,增强驱动能力,引脚的输出电流更大
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //引脚的速度最大为100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //没有使用内部上拉电阻
GPIO_Init(GPIOE, &GPIO_InitStructure);
}
//启动信号
void OLED_Iic_Start(void)
{
OLED_Iic_Sda_Mode(GPIO_Mode_OUT);
//总线空闲
OLED_SCL = 1;
OLED_SDA_OUT = 1;
delay_us(5);
//启动信号
OLED_SDA_OUT = 0;
delay_us(5);
OLED_SCL = 0;
}
//停止信号
void OLED_Iic_Stop(void)
{
OLED_Iic_Sda_Mode(GPIO_Mode_OUT);
OLED_SCL = 0;
OLED_SDA_OUT = 0;
delay_us(5);
OLED_SCL = 1;
delay_us(5);
OLED_SDA_OUT = 1;
}
//引脚发送一位数据
void OLED_Iic_Send_Ack(u8 ack)
{
OLED_Iic_Sda_Mode(GPIO_Mode_OUT);
OLED_SCL = 0;
/*准备数据*/
//发数据1
if(ack == 1)
{
OLED_SDA_OUT = 1; //引脚输出
}
//发数据0
if(ack == 0)
{
OLED_SDA_OUT = 0; //引脚输出
}
delay_us(5);
OLED_SCL = 1;
delay_us(5);
OLED_SCL = 0;
}
//引脚发送一个字节数据
void OLED_Iic_Send_Byte(u8 data)
{
u8 i;
OLED_Iic_Sda_Mode(GPIO_Mode_OUT);
OLED_SCL = 0;
//0 1 1 1 1 0 0 0
for(i=0; i<8; i++)
{
/*准备数据*/
//发数据1
if(data & (1<<(7-i)))
{
OLED_SDA_OUT = 1; //引脚输出
}
//发数据0
else
{
OLED_SDA_OUT = 0; //引脚输出
}
delay_us(5);
OLED_SCL = 1;
delay_us(5);
OLED_SCL = 0;
}
}
//接受一位数据
u8 OLED_Iic_Rcv_Ack(void)
{
u8 ack;
OLED_Iic_Sda_Mode(GPIO_Mode_IN);
OLED_SCL = 0;
delay_us(5);
OLED_SCL = 1;
delay_us(5);
if(OLED_SDA_IN == 1) //引脚为电平为1
{
ack = 1;
}
if(OLED_SDA_IN == 0) //引脚为电平为1
{
ack = 0;
}
OLED_SCL = 0;
return ack;
}
//接受一个字节数据
u8 OLED_Iic_Rcv_Byte(void)
{
u8 i, data = 0; //0 0 0 0 0 0 0 0 比如有数据:1 1 0 0 1 0 0 0
OLED_Iic_Sda_Mode(GPIO_Mode_IN);
OLED_SCL = 0;
//0 1 1 1 1 0 0 0
for(i=0; i<8; i++)
{
delay_us(5);
OLED_SCL = 1;
delay_us(5);
//接受数据
if(OLED_SDA_IN == 1) //引脚为电平为1
{
data |= (1<<(7-i));
}
OLED_SCL = 0;
}
return data;
}
void I2C_WriteByte(uint8_t addr,uint8_t data)
{
u8 ack;
// I2C_GenerateSTART(I2C1, ENABLE);//开启I2C1
// while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));/*EV5,主模式*/
//启动信号
OLED_Iic_Start();
// I2C_Send7bitAddress(I2C1, OLED_ADDRESS, I2C_Direction_Transmitter);//器件地址 -- 默认0x78
// while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
OLED_Iic_Send_Byte(OLED_ADDRESS);
ack = OLED_Iic_Rcv_Ack();
if(ack == 1)
{
printf("ack failure\n");
return ;
}
// I2C_SendData(I2C1, addr);//寄存器地址
// while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
OLED_Iic_Send_Byte(addr);
ack = OLED_Iic_Rcv_Ack();
if(ack == 1)
{
printf("ack failure\n");
return ;
}
// I2C_SendData(I2C1, data);//发送数据
// while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
OLED_Iic_Send_Byte(data);
ack = OLED_Iic_Rcv_Ack();
if(ack == 1)
{
printf("ack failure\n");
return ;
}
// I2C_GenerateSTOP(I2C1, ENABLE);//关闭I2C1总线
OLED_Iic_Stop();
}
void WriteCmd(unsigned char I2C_Command)//写命令
{
I2C_WriteByte(0x00, I2C_Command);
}
void WriteDat(unsigned char I2C_Data)//写数据
{
I2C_WriteByte(0x40, I2C_Data);
}
void OLED_Init(void)
{
delay_ms(100); //这里的延时很重要
WriteCmd(0xAE); //display off
WriteCmd(0x20); //Set Memory Addressing Mode
WriteCmd(0x10); //00,Horizontal Addressing Mode;01,Vertical Addressing Mode;10,Page Addressing Mode (RESET);11,Invalid
WriteCmd(0xb0); //Set Page Start Address for Page Addressing Mode,0-7
WriteCmd(0xc8); //Set COM Output Scan Direction
WriteCmd(0x00); //---set low column address
WriteCmd(0x10); //---set high column address
WriteCmd(0x40); //--set start line address
WriteCmd(0x81); //--set contrast control register
WriteCmd(0xff); //亮度调节 0x00~0xff
WriteCmd(0xa1); //--set segment re-map 0 to 127
WriteCmd(0xa6); //--set normal display
WriteCmd(0xa8); //--set multiplex ratio(1 to 64)
WriteCmd(0x3F); //
WriteCmd(0xa4); //0xa4,Output follows RAM content;0xa5,Output ignores RAM content
WriteCmd(0xd3); //-set display offset
WriteCmd(0x00); //-not offset
WriteCmd(0xd5); //--set display clock divide ratio/oscillator frequency
WriteCmd(0xf0); //--set divide ratio
WriteCmd(0xd9); //--set pre-charge period
WriteCmd(0x22); //
WriteCmd(0xda); //--set com pins hardware configuration
WriteCmd(0x12);
WriteCmd(0xdb); //--set vcomh
WriteCmd(0x20); //0x20,0.77xVcc
WriteCmd(0x8d); //--set DC-DC enable
WriteCmd(0x14); //
WriteCmd(0xaf); //--turn on oled panel
}
void OLED_SetPos(unsigned char x, unsigned char y) //设置起始点坐标
{
WriteCmd(0xb0+y);
WriteCmd(((x&0xf0)>>4)|0x10);
WriteCmd((x&0x0f)|0x01);
}
void OLED_Fill(unsigned char fill_Data)//全屏填充
{
unsigned char m,n;
for(m=0;m<8;m++)
{
WriteCmd(0xb0+m); //page0-page1
WriteCmd(0x00); //low column start address
WriteCmd(0x10); //high column start address
for(n=0;n<128;n++)
{
WriteDat(fill_Data);
}
}
}
void OLED_CLS(void)//清屏
{
OLED_Fill(0x00);
}
//--------------------------------------------------------------
// Prototype : void OLED_ON(void)
// Calls :
// Parameters : none
// Description : 将OLED从休眠中唤醒
//--------------------------------------------------------------
void OLED_ON(void)
{
WriteCmd(0X8D); //设置电荷泵
WriteCmd(0X14); //开启电荷泵
WriteCmd(0XAF); //OLED唤醒
}
//--------------------------------------------------------------
// Prototype : void OLED_OFF(void)
// Calls :
// Parameters : none
// Description : 让OLED休眠 -- 休眠模式下,OLED功耗不到10uA
//--------------------------------------------------------------
void OLED_OFF(void)
{
WriteCmd(0X8D); //设置电荷泵
WriteCmd(0X10); //关闭电荷泵
WriteCmd(0XAE); //OLED休眠
}
//--------------------------------------------------------------
// Prototype : void OLED_ShowChar(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize)
// Calls :
// Parameters : x,y -- 起始点坐标(x:0~127, y:0~7); ch[] -- 要显示的字符串; TextSize -- 字符大小(1:6*8 ; 2:8*16)
// Description : 显示codetab.h中的ASCII字符,有6*8和8*16可选择
//--------------------------------------------------------------
void OLED_ShowStr(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize)
{
unsigned char c = 0,i = 0,j = 0;
switch(TextSize)
{
case 1:
{
while(ch[j] != '\0')
{
c = ch[j] - 32;
if(x > 126)
{
x = 0;
y++;
}
OLED_SetPos(x,y);
for(i=0;i<6;i++)
WriteDat(F6x8[c][i]);
x += 6;
j++;
}
}break;
case 2:
{
while(ch[j] != '\0')
{
c = ch[j] - 32;
if(x > 120)
{
x = 0;
y++;
}
OLED_SetPos(x,y);
for(i=0;i<8;i++)
WriteDat(F8X16[c*16+i]);
OLED_SetPos(x,y+1);
for(i=0;i<8;i++)
WriteDat(F8X16[c*16+i+8]);
x += 8;
j++;
}
}break;
}
}
//--------------------------------------------------------------
// Prototype : void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N)
// Calls :
// Parameters : x,y -- 起始点坐标(x:0~127, y:0~7); N:汉字在codetab.h中的索引
// Description : 显示codetab.h中的汉字,16*16点阵
//--------------------------------------------------------------
void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N)
{
unsigned char wm=0;
unsigned int adder=32*N;
OLED_SetPos(x , y);//
for(wm = 0;wm < 16;wm++)
{
WriteDat(F16x16[adder]);
adder += 1;
}
OLED_SetPos(x,y + 1);
for(wm = 0;wm < 16;wm++)
{
WriteDat(F16x16[adder]);
adder += 1;
}
}
//void OLED_ShowCN1(unsigned char x, unsigned char y, unsigned char N)
//{
// unsigned char wm=0;
// unsigned int adder=32*N;
// OLED_SetPos(x , y);//
// for(wm = 0;wm < 16;wm++)
// {
// WriteDat(E16x16[adder]);
// adder += 1;
// }
// OLED_SetPos(x,y + 1);
// for(wm = 0;wm < 16;wm++)
// {
// WriteDat(E16x16[adder]);
// adder += 1;
// }
//}
//--------------------------------------------------------------
// Prototype : void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]);
// Calls :
// Parameters : x0,y0 -- 起始点坐标(x0:0~127, y0:0~7); x1,y1 -- 起点对角线(结束点)的坐标(x1:1~128,y1:1~8)
// Description : 显示BMP位图
//--------------------------------------------------------------
void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[])
{
unsigned int j=0;
unsigned char x,y;
if(y1%8==0)
y = y1/8;
else
y = y1/8 + 1;
for(y=y0;y<y1;y++)
{
OLED_SetPos(x0,y);
for(x=x0;x<x1;x++)
{
WriteDat(BMP[j++]);
}
}
}
显示登陆界面
//void load_shou(void)
//{
// unsigned char i;
//
// Delay_Init();
// I2C_Configuration();
// OLED_Init();
//
// OLED_Fill(0xFF);//全屏点亮
//
// delay_ms(500);
// OLED_Fill(0x00);//全屏灭
// delay_ms(500);
// delay_ms(500);
//
// for(i=0;i<5;i++)
// {
// OLED_ShowCN1(29+i*16,11,i);//测试显示中文
// }
// OLED_OFF();//测试OLED休眠
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// OLED_ON();//测试OLED休眠后唤醒
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
//}
//显示主界面
void Show_main(void)
{
unsigned char i;
Delay_Init();
I2C_Configuration();
OLED_Init();
OLED_Fill(0xFF);//全屏点亮
delay_ms(500);
OLED_Fill(0x00);//全屏灭
delay_ms(500);
delay_ms(500);
for(i=0;i<5;i++)
{
OLED_ShowCN(29+i*16,11,i);//测试显示中文
}
delay_ms(500);
delay_ms(500);
delay_ms(500);
delay_ms(500);
OLED_OFF();//测试OLED休眠
delay_ms(500);
delay_ms(500);
delay_ms(500);
delay_ms(500);
OLED_ON();//测试OLED休眠后唤醒
delay_ms(500);
delay_ms(500);
delay_ms(500);
delay_ms(500);
}
//输入密码解锁界面
void show_unlock()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(0,3,(unsigned char *)"Please input password",1);//测试8*16字符
}
//密码正确
void show_right()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(45,3,(unsigned char *)"Right!",2);//测试8*16字符
}
//刷卡失败
void show_RFID_Failer()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(45,3,(unsigned char *)"Error!",2);//测试8*16字符
}
//刷卡成功
void show_RFID_Success()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(45,3,(unsigned char *)"Open Door",2);//测试8*16字符
}
//密码错误
void show_error()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
OLED_ShowStr(45,3,(unsigned char *)"Error!",2);//测试8*16字符
}
//0.返回(显示)
void set_return()
{
OLED_Fill(0x00);//全屏灭
delay_ms(500);
//返回(显示)
for(int i=11; i<15 ;i++)
{
OLED_ShowCN(0+(i-11)*16,0,i);//测试显示中文
}
OLED_ShowStr(8,0,(unsigned char *)"0",2);//测试8*16字符
}
//1.密码修改(显示)
void set_password()
{
//密码修改(显示)
for(int i=15; i<21 ;i++)
{
OLED_ShowCN(0+(i-15)*16,2,i);//测试显示中文
}
OLED_ShowStr(8,2,(unsigned char *)"1",2);//测试8*16字符
}
//2.添加指纹(显示)
void set_add()
{
//添加指纹(显示)
for(int i=21; i<27 ;i++)
{
OLED_ShowCN(0+(i-21)*16,4,i);//测试显示中文
}
OLED_ShowStr(8,4,(unsigned char *)"2",2);//测试8*16字符
}
//3.删除指纹(显示)
void set_delete()
{
//删除指纹(显示)
for(int i=27; i<33 ;i++)
{
OLED_ShowCN(0+(i-27)*16,6,i);//测试显示中文
}
OLED_ShowStr(8,6,(unsigned char *)"3",2);//测试8*16字符
}
//展示设置界面
void show_set()
{
set_return();//返回显示
set_password();//修改密码显示
set_add();//添加指纹显示
set_delete();//删除指纹显示
}
//请按下手指界面
void show_please_press()
{
OLED_Fill(0x00);//全屏灭
//delay_ms(500);
OLED_ShowStr(20,4,(unsigned char *)"Please press",2);//测试8*16字符
}
//请再次按下手指界面
void show_press_again()
{
OLED_Fill(0x00);//全屏灭
//delay_ms(500);
OLED_ShowStr(20,2,(unsigned char *)"Please press",2);//测试8*16字符
OLED_ShowStr(30,4,(unsigned char *)"again",2);//测试8*16字符
}
.h文件
#ifndef __OLED_I2C_H
#define __OLED_I2C_H
#include "stm32f4xx.h"
#define OLED_SCL PEout(8)
#define OLED_SDA_IN PEin(10)
#define OLED_SDA_OUT PEout(10)
#define OLED_ADDRESS 0x78 //通过调整0R电阻,屏可以0x78和0x7A两个地址 -- 默认0x78
void I2C_Configuration(void);
void I2C_WriteByte(uint8_t addr,uint8_t data);
void WriteCmd(unsigned char I2C_Command);
void WriteDat(unsigned char I2C_Data);
void OLED_Init(void);
void OLED_SetPos(unsigned char x, unsigned char y);
void OLED_Fill(unsigned char fill_Data);
void OLED_CLS(void);
void OLED_ON(void);
void OLED_OFF(void);
void OLED_ShowStr(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize);
void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N);
void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]);
#endif
7、 4x4按键
①按键原理图

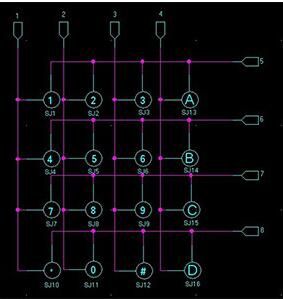
有4根线控制行、4根线控制列,然后实现16个按键的功能
②、代码实现
//.c文件
#include "key.h"
#include "delay.h"
#include "sys.h"
/*
C4-->PE6
C3-->PB6
C2-->PC9
C1-->PC7
R1-->PC6
R2-->PC8
R3-->PC11
R4-->PE5
*/
extern u8 flag;
void Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//打开GPIOC时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);
//打开GPIOB时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//打开GPIOE时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;//输出模式
GPIO_InitStructure.GPIO_OType=GPIO_OType_OD;//开漏
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_6|GPIO_Pin_7;//6 7 8 9引脚
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC, GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9);//将所有的按键的电平置位
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;//6引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_6);//将所有的按键的电平置位
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_6;//5 6引脚
GPIO_Init(GPIOE, &GPIO_InitStructure);
GPIO_SetBits(GPIOE, GPIO_Pin_5|GPIO_Pin_6);//将所有的按键的电平置位
}
//判断是哪个按键按下函数
u8 Key_Press(void)
{
while(1)
{
//第四列
C4 = 0;
//读取各列的值
if(R1 == 0)//第一行
{
delay_ms(10);//按键消抖
if(R1 == 0)
{
C4 = 1;
//第一行第四列按下
return 4;
}
}
if(R2 == 0)//第二行
{
delay_ms(10);//按键消抖
if(R2 == 0)
{
C4 = 1;
//第二行第四列按下
return 8;
}
}
if(R3 == 0)//第三行
{
delay_ms(10);//按键消抖
if(R3 == 0)
{
C4 = 1;
//第三行第四列按下
return 12;
}
}
if(R4 == 0)//第四行
{
delay_ms(10);//按键消抖
if(R4 == 0)
{
C4 = 1;
//第四行第四列按下
return 16;
}
}
C4 = 1;
//第三列
C3 = 0;
//读取各列的值
if(R1 == 0)//第一行
{
delay_ms(10);//按键消抖
if(R1 == 0)
{
C4 = 1;
//第一行第三列按下
return 3;
}
}
if(R2 == 0)//第二行
{
delay_ms(10);//按键消抖
if(R2 == 0)
{
C4 = 1;
//第二行第三列按下
return 7;
}
}
if(R3 == 0)//第三行
{
delay_ms(10);//按键消抖
if(R3 == 0)
{
C4 = 1;
//第三行第三列按下
return 11;
}
}
if(R4 == 0)//第四行
{
delay_ms(10);//按键消抖
if(R4 == 0)
{
C4 = 1;
//第四行第三列按下
return 15;
}
}
C3 = 1;
//第二列
C2 = 0;
//读取各列的值
if(R1 == 0)//第一行
{
delay_ms(10);//按键消抖
if(R1 == 0)
{
C2 = 1;
//第一行第二列按下
return 2;
}
}
if(R2 == 0)//第二行
{
delay_ms(10);//按键消抖
if(R2 == 0)
{
C2 = 1;
//第二行第二列按下
return 6;
}
}
if(R3 == 0)//第三行
{
delay_ms(10);//按键消抖
if(R3 == 0)
{
C2 = 1;
//第三行第二列按下
return 10;
}
}
if(R4 == 0)//第四行
{
delay_ms(10);//按键消抖
if(R4 == 0)
{
C2 = 1;
//第四行第二列按下
return 14;
}
}
C2 = 1;
//第一列
C1 = 0;
//读取各列的值
if(R1 == 0)//第一行
{
delay_ms(10);//按键消抖
if(R1 == 0)
{
C1 = 1;
//第一行第一列按下
return 1;
}
}
if(R2 == 0)//第二行
{
delay_ms(10);//按键消抖
if(R2 == 0)
{
C1 = 1;
//第二行第一列按下
return 5;
}
}
if(R3 == 0)//第三行
{
delay_ms(10);//按键消抖
if(R3 == 0)
{
C1 = 1;
//第三行第一列按下
return 9;
}
}
if(R4 == 0)//第四行
{
delay_ms(10);//按键消抖
if(R4 == 0)
{
C1 = 1;
//第四行第一列按下
return 13;
}
}
C1 = 1;
}
}
.h文件
//这里我使用的是位带操作,来实现的引脚配置
#ifndef __KEY_H
#define __KEY_H
#include "stm32f4xx.h"
/*
C4-->PE6
C3-->PB6
C2-->PC9
C1-->PC7
R1-->PC6
R2-->PC8
R3-->PC11
R4-->PE5
*/
#define C4 PEout(6)
#define C3 PBout(6)
#define C2 PCout(9)
#define C1 PCout(7)
#define R1 PCin(6)
#define R2 PCin(8)
#define R3 PCin(11)
#define R4 PEin(5)
void Key_Init(void);
u8 Key_Press(void);
#endif
9、项目总结
通过调用这些函数,就可以实现智能门锁的系统开发,有需要源码的小伙伴,我阔以给你提供。