【路径规划】基于matlab人工势场算法多机器人协同编队避障路径规划【含Matlab源码 115期】
一、简介
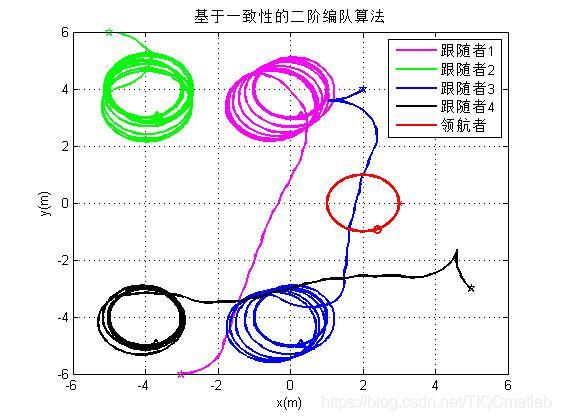
基于matlab人工势场算法多机器人协同编队避障路径规划
二、源代码
function [ output_args ] = formation_avoidance3( input_args )
%% 初始化 位置pose、速度V、加速度控制量control
init_f=[-3 -6 0; %%%[x y th]
-5 6 0;
2 4 pi/4;
5 -3 -pi/4;
3 0 pi/2];
pose_x=init_f(:,1);
pose_y=init_f(:,2);
pose_th=init_f(:,3);
%% follower相对leader的位置
delta_x=[-2 -6 -2 -6 0]; % 相对间隔误差
delta_y=[4 4 -4 -4 0]; %领航者与自己无误差
fol_num=4;
N=5; % 4follower and 1 leader
countmax=2000;
dt=0.1;
gama=3;
di=0.02; %%%重心偏移 单位m
K0=0;
%%% 直线K1 K2都设在0.2左右 k3=0
%%% 圆不考虑K2=0 K1,K3设为0.2左右
K1=1;%%%位置偏差线速度调节
K2=1;%%位置偏差角速度调节
K3=0.01;%%朝向偏差角速度调节
% %% 通信拓扑图:1-4行为follower 最后一行为leader
A=[0 1 1 1 1; % a(ij)
0 0 0 0 1;
0 0 0 1 1;
0 0 1 0 1;
0 0 0 0 0];
% %% 通信拓扑图:1-4行为follower 最后一行为leader
% A=[0 0 0 0 1; % a(ij)
% 0 0 0 0 1;
% 0 0 0 0 1;
% 0 0 0 0 1;
% 0 0 0 0 0];
A=[0 1 1 1 3; % a(ij)
0 0 0 0 3;
0 0 0 1 3;
0 0 1 0 3;
0 0 0 0 0];
linear_v(:,1)=[0;0;0;0;1];
angular_w(:,1)=[0;0;0;0;1];
k=0;
% 最高速度m/s],最高旋转速度[rad/s],加速度[m/ss],旋转加速度[rad/ss]]
Kinematic=[1.5,toRadian(60.0),0.5,toRadian(50.0)];%% 运动限制
error_temp(1:fol_num,1:4)=0;%%行为follower个数、列为两个时刻的x,y偏差
in_degree=sum(A,2);
%% 开始循环 走顺时针圆周
% figure;
for count=1:countmax
k=k+1;
linear_v(N,k+1)=linear_v(N,k);%领航者速度不变
angular_w(N,k+1)=angular_w(N,k);
% if count==500
% linear_v(N,k+1)=0.5;%领航者速度不变
% angular_w(N,k+1)=0.5;
% end
% if count==1000
% linear_v(N,k+1)=0.5;%领航者速度不变
% angular_w(N,k+1)=0;
% end
for i=1:fol_num
sum_delta_x=0;
sum_delta_y=0;
for j=1:N %%考虑邻居对它的影响
if k==1
temp_x=0;
temp_y=0;
else
temp_x=(pose_x(j,k)-pose_x(j,k-1))/dt;
temp_y=(pose_y(j,k)-pose_y(j,k-1))/dt;
end
sum_delta_x=sum_delta_x+A(i,j)*(temp_x+gama*((pose_x(j,k)-pose_x(i,k))-(delta_x(j)-delta_x(i))));
sum_delta_y=sum_delta_y+A(i,j)*(temp_y+gama*((pose_y(j,k)-pose_y(i,k))-(delta_y(j)-delta_y(i))));
end
sum_delta_x=sum_delta_x/in_degree(i);
sum_delta_y=sum_delta_y/in_degree(i);
linear_v(i,k+1)=cos(pose_th(i,k))*sum_delta_x+sin(pose_th(i,k))*sum_delta_y;
angular_w(i,k+1)=(-sin(pose_th(i,k))*sum_delta_x+cos(pose_th(i,k))*sum_delta_y)/di;
u_old=[linear_v(i,k);angular_w(i,k)];
u=[linear_v(i,k+1);angular_w(i,k+1)];
%%%加入速度限制
u=limit(u_old,u,Kinematic);
old_position=[pose_x(i,k);pose_y(i,k);pose_th(i,k)];
new_position=motion(old_position,u,dt);
pose_x(i,k+1)=new_position(1)-di*cos(new_position(3));
pose_y(i,k+1)=new_position(2)-di*sin(new_position(3));
pose_th(i,k+1)=new_position(3);
end
%% 更新领航者
old_position=[pose_x(N,k);pose_y(N,k);pose_th(N,k)];
u=[linear_v(N,k+1);angular_w(N,k+1)];
new_position=motion(old_position,u,dt);
pose_x(N,k+1)=new_position(1);
pose_y(N,k+1)=new_position(2);
pose_th(N,k+1)=new_position(3);
tt_x(1:4,k)=pose_x(5,k);
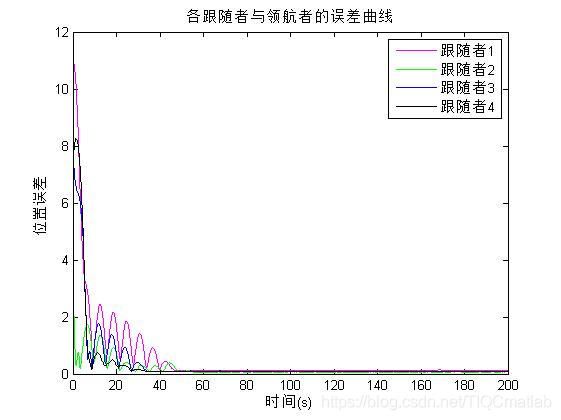
error_x(:,k)=tt_x(1:4,k)-pose_x(1:4,k)+(delta_x(1:4))';
tt_y(1:4,k)=pose_y(5,k);
error_y(:,k)=tt_y(1:4,k)-pose_y(1:4,k)+(delta_y(1:4))';
function interpoint( x1,y1,x2,y2,x3,y3,colo,lstyle)
%UNTITLED2 此处显示有关此函数的摘要
% 此处显示详细说明
if (nargin==6)
colo='k';
lstyle=':';
end
syms k b m n x y;
if(x1==x2)%x1x2直线斜率不存在
solx=x1;
soly=y3;
elseif(y1==y2)%x1x2直线斜率为0
solx=x3;
soly=y1;
else
solk=(y2-y1)/(x2-x1);
solb=y2-solk*x2;
solk1=-1/solk;
solb1=y3-solk1*x3;
solx=(solb1-solb)/(solk-solk1);
soly=solk*solx+solb;
% [solx,soly] = solve(solk1*x-y+solb1==0,solk*x-y+solb==0,x,y);
end
line([x1,solx],[y1,soly],'color',colo,'linestyle',lstyle);
line([x3,solx],[y3,soly],'color',colo,'linestyle',lstyle);
end
三、运行结果
四、备注
版本:2014a