上电之后(bootload阶段)该做什么
1、第一行程序
拿到空PCB板之后,硬件工程师首先会测试各主要线路是否通连,各焊点是否有空焊、断接或短路的情况,然后逐个模块焊接上去。之后需要验证系统上电之后,CPU与各组件的供电电压是否正常,供给CPU的震荡电路能否能够正常起振,外部存储器能否正常读写。当把我们的程序用JTAG工具下载到板子上后,在真正调试系统前需要做好以下检查:
- 利用调试工具,在程序的第一行设定断点,确定程序有停下来;
- 检查CPU的程序计数器PC是否正确;
- 检查CPU内部RAM的内容和我们下载的可执行文件是否相同;
- 程序的第一行命令为设定CPU状态寄存器,并观察CPU的状态寄存器是否如预期改变;
- 继续单步执行,确认PC寄存器是否会跟着改变,且每行命令的执行结果都是正确的。
检查完以上各项后,只能证明板子上的电源电路以及CPU是正常的,接下来要继续验证CPU与外围设备,确认板子的正确性与稳定性后,才能进行下一步测试。
2、基本硬件测试
既然Boot-Loader的责任是帮其它程序布置可运行的环境,那么就要做好以下验证:
- CPU寄存器(状态寄存器、通用寄存器、内存映射寄存器)操作测试;
// 设定SP(Stack Point)寄存器
//
asm("xld.w %r15, 0x2000");
asm("ld.w %sp, %r15");
// 设定CPU的状态寄存器
//
asm("xld.w %r15, 0x200010");
asm("ld.w %psr, %r15");
// 将寄存器0x300023的bit 1设为1
*(volatile unsigned char *)0x300023 |= 0x2;
- Stack Pointer的设置是否正确?函数调用是否正确运行?
- 中断是量表设置是否正确?中断矢量程序是否正常运行?
- 存储器初始化及其操作测试,保证所有的存储器都可以正常读写;
- 将数据段载入RAM,对bss段设定初值,并将需要在RAM中运行的程序载入到RAM。保证当主程序执行起来后,全局变量的初始值都是正确的。
只有确保以上测试通过后才能进行下一步工作。
(1)确认函数调用能否正常运行
正确设置堆栈(Stack)是函数能否成功调用的前提,在嵌入式系统开发时,系统要自行管理堆栈,如果管理不当,可能会发生函数调用或调用几层之后就死机的状况。因为C语言利用堆栈完成以下事项:
- 存储函数返回地址;
- 函数调用时的参数传递(参数较多时);
- 存储函数内部的局部变量;
- 中断服务程序执行时(发生中断时),存储CPU当前状态及返回地址。
堆栈顶点地址(Stack Point)的配置是一件很重要的事,但却极易被人忽略。主要是在Windows或Linux上编程时,操作系统在产生可执行文件时,linker会自动帮程序加上一段Startup Code,其中就包含了Stack存储器的配置。但在无操作系统的嵌入式系统中,调用任何函数之前都要先为其设置好堆栈空间(Stack Point)。
当用C语言调用了一个函数,例如fun(a,b),编译后的机器码应该包含以下动作:
- 执行指令push,将参数a和b存入Stack,同时堆栈指针SP减一;
- 将当前程序计数寄存器PC的值(也即返回地址:函数调用指令的下一条指令地址)存到堆栈中;
- 执行指令Call,把PC的值设为函数fun()的地址,下一个被执行的指令就是函数的第一条命令。
- 当函数fun执行时,可利用当前SP的值计算出参数a和b的地址;
- 如果函数内部有局部变量,则依次将这些变量存到堆栈中。所以在嵌入式开发中尽量不要定义size太大的变量,否则有栈溢出(Stack Overflow)的风险。
- 当函数执行完毕,CPU会执行ret命令,该命令会从Stack顶层取出返回地址,然后赋值给PC寄存器,则下个指令就会执行函数后面的下一行指令,从而完成函数的调用。
如果SP寄存器没有设定到正确的地址,或是没有配置足够大的存储区域作为栈空间,那么在调用函数时很可能就会出错。下图就是一个栈空间溢出,破坏程序数据段的例子:

为避免以上情况的发生,一般会选择某块RAM 的顶端(最大地址)当作SP寄存器的初值,但具体栈的大小定位多少合适要根据具体软硬件环境和项目要求。一般采用的方法是,刚开始稍微定义大一点,例如2KB-4KB左右,然后让测试人员运行完系统所有功能(函数)后,记录下SP在每次函数调用后的最小值,它与栈顶地址的差就是所需最小栈空间,一般会稍微再放一点。
(2)确认中断系统能否正常运行
负责写驱动程序的工程师要将中断服务程序的地址填入中断矢量表,并必须保证当驱动程序被执行时,中断系统是正常的。一般来说主要做好以下工作:
- 中断矢量表数组,详细注解每个entry代表的中断源;
- 如果是外接中断控制器,要先完成中断控制器的驱动程序,才能开始中断系统的测试。
- 设定CPU的中断矢量表地址寄存器(有些CPU无中断矢量表地址寄存器,但它会指定某个固定地址为中断矢量表的地址)
- 设定CPU的中断控制寄存器(优先级、中断允许位等)
- 确定中断被触发后,对应的ISR会被执行。
- 提供ISR的范例,让ISR编写者不用知道中断系统的细节。
// ISR模板
//
void isr_template(void)
{
// 将所有通用目的寄存器存到堆栈
//
asm("pushn %r15"); /*将r0 - r15 都存到堆栈中 */
//将ALR与AHR寄存器通过r1存到堆栈
//你无需搞清ALR和AHR是什么寄存器,不同的CPU有不同的寄存器需要存储
//
asm("ld.w %r1, %alr");
asm("ld.w %r0, %ahr");
asm("pushn %r1");
//调用C语言函数your_ISR,即真正ISR要处理的事写在该函数里就行
//
asm("xcall your_ISR");
//从堆栈中取回被调用时的ALR和AHR寄存器的值
//
asm("popn %r1");
asm("ld.w %alr, %r1");
asm("ld.w %ahr, %r0");
//从堆栈中取回r1 - r15的值
//
asm("popn %r15");
//执行中断返回指令,返回被中断的程序
//
asm("reti");
}
在以上各环节中容易出错的地方有:
- 中断优先级寄存器没设正确;
- 中断矢量表中各个entry与中断源的对应关系错误;
- 中断矢量表地址设置错误,很多CPU会要求中断矢量表的地址要设置在偶数地址或是4的倍数,甚至是128KB的倍数。
那如何判断ISR有没有被正确执行呢?一般的方法是选择一个简单的中断源(例如除0错误中断),在其ISR中设定一个断点,然后单步执行,看能否顺利执行ISR程序及正确返回中断发生的地方(除零指令的下一条语句)。
(3)存储器测试
存储器出问题的地方有:
硬件方面:数据线、地址线连接错误;
软件方面:SRAM、NOR Flash、ROM不需要额外电路,直接可以使用,但SDRAM则还需要额外的SDRAM Controler电路才能使用,程序必须先设定好SDRAM Controler的配置(SDRAM大小、速度等);
外部存储器的时序设置,若时序设定太快,系统会不稳定,太慢,则系统性能变差。一般CPU的Timing设定表会说明应该如何设定。
在进行下部工作前要先测试存储器的每一个Byte,确保读写(如果可以写入的话)正常。方法是对每一个字节依次写入0x00、0xFF、0x55、0xAA,确保每一位都会被写入0与1。
int SRAM_testing(void) { int i,counter =0; //待测RAM起始地址为0x2000000,大小为2MB. unsigned char *pointer = (unsigned char *)0x2000000; unsigned char data[4]={0x00,0xFF,0x55,0xAA}; for(i=0; i<4; i++) { // 逐一对每个字节写入某特殊值 for(j=0; j<(8*1024*1024); j++) pointer[i] = data[i] // 逐一读出每个字节,判断写入的值是否正确 for(j=0; j<(8*1024*1024); j++) pointer[i]==data[i]?::counter++; } return counter; //返回出错字节的个数 }对于只读ROM,如何验证烧录到存储器中的数据和原始映像文件一致呢?一般会采用校验和检验法。即分别计算原始映像文件和烧录到ROM中文件的校验和是否相等。
/*************************************************************** Function Name: calculate_ROM_checksum Function Purpuse:计算起始地址为0x2000000,size为8MB存储器的校验和 ****************************************************************/ unsigned long calculate_ROM_checksum(void) { unsigned long checksum = 0; unsigned char *pointer = 0x2000000; for(i=0; i<(8*1024*1024); i++) checksum += pointer[i]; return checksum; }
(4)CPU初始化
在Boot-Loader阶段因该做好以下CPU相关的设定:
- 设定堆栈指针寄存器SP;
- 设定状态寄存器,禁止中断;
- 设定中断矢量表指针;
- 设定CPU执行状态(时钟时序);
- 设定存储器控制器(如果用到了类似SDRAM的存储器);
- 设定CPU操作各存储器的时序;
- 设定CPU的PIN脚功能;
- 初始化外围设备(LCD Controler、USB Controler、SD卡接口等)
3、载入程序段与数据初始化
(1)载入data段
有初值的全局变量必须被存储在可执行文件中、被烧录到ROM里。但执行时因为这些全局变量的值会被改变,所以当然不能在ROM里运行,连接时必须寻址到RAM中。正因为这种 “存储在ROM,运行在RAM” 的特性,才有传输data段的需要,且必须在所有程序使用全局变量前完成这些事。

上图中,data段的内容原本在可执行文件中的rodata段之后,但执行时,需要将data段复制到RAM中的bss段之后。连接脚本如下:
.data __END_bss : AT(__END_rodata)
{
__START_data = .;
*(.data);
__END_data = .;
// 定义可在程序中使用的变量“__START_data_LMA”,表示data段的存储起始地址LMA
__START_data_LMA = LOADADDR(.data);
//定义可在程序中使用的变量“__SIZE_DATA”,表示data段的大小
__SIZE_DATA = __END_data - __START_data;
}
传输程序如下:
/**************************************************
Function Name: copy_data_section()
Function Purpuse:将可执行文件中的数据段复制到内存中
***************************************************/
extern unsigned long *__START_data;
extern unsigned long *__START_data_LMA;
extern int __SIZE_DATA;
void copy_data_section(void)
{
int i;
unsigned long *dest = __START_data;
unsigned long *src = __START_data_LMA;
//假设data段的大小是4的整数倍个字节
for(i=0; i<(__SIZE_DATA/4); i++)
dest[i] = src[i];
}
(2)设定bss段
bss段的设定较为简单,因为bss段里的成员都是没有初始值的全局变量,所有根本不需要存储空间,在执行时只要把bss段的执行空间(VMA)都设为0即可。
/*******************************************
定义bss段,起始地址(VMA)从0开始
******************************************/
.bss 0x0 :
{
__START_bss = .;
*(.bss);
__END_bss = .;
//定义可在程序中使用的变量:__SIZE_BSS
__SIZE_BSS = __END_bss - __START_bss;
}
设定bss段为0的代码如下:
/**************************************************
Function Name: clear_bss_section()
Function Purpuse:将bss段清零
***************************************************/
extern unsigned long * __START_bss;
extern int __START_BSS;
void clear_bss_section(void)
{
int i;
unsigned long * dest = __START_bss;
//假设bss段的大小为4的整数倍字节大小
for(i=0; i<(__SIZE_BSS/4); i++)
dest[i] = 0;
}
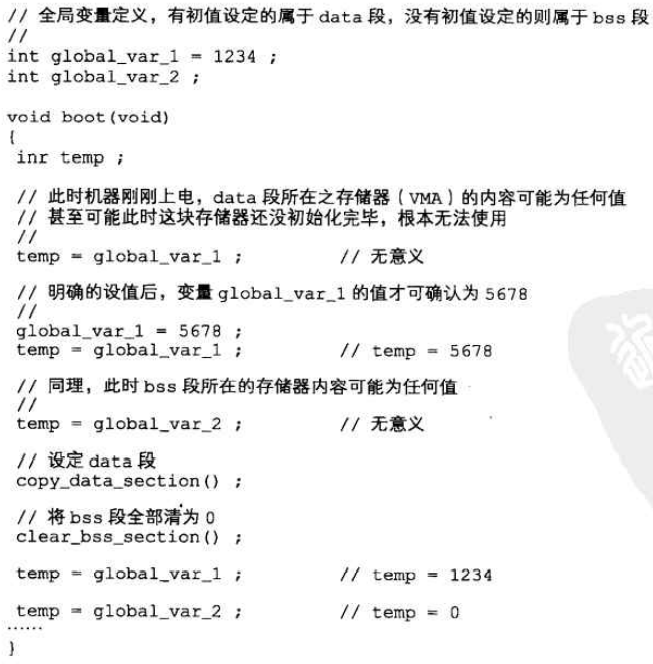
Attention:在boot阶段,data段和bss段一定要先设定,否则执行期间全局变量的值就不正确。换句话说,在设定完data和bss段之前,boot-load程序是不能使用全局变量的,如果一定要使用,那就避免在定义全局变量时赋值,一定要在程序内明确赋值才行。例如:
(3)载入text段
当某个系统程序或者应用程序模块需要较高的执行速度时,往往可以将他们复制到系统内存中执行。但系统内存往往空间有限,不可能同时全部加载进去。所以我们一般会写一个函数,并寻址到同一个地址,在需要时才做载入的动作。
各种类型的存储器性能由大至小分别为:CPU寄存器、CPU cache、CPU内部RAM、外部SRAM、NOR Flash、SDRAM、Mask ROM、NAND Flash。
NAND Flash:价格低,容量大,可把其想象成类似硬盘的设备,只不过无法直接寻址操作,程序无法再上面直接执行;
NOR Flash:价格高,容量小,但读数据快,可把其想象成可重复写的ROM,程序可在上面直接运行。
Mask ROM:成本高,容量有限,但程序可直接在上面运行;
SDRAM:性价比高,一般作为系统的外置内存,程序可直接在上面运行;
SRAM:价格昂贵,容量小,一般作为系统的内置内存,程序可在上面直接运行。
(4)几种系统存储器架构
从NAND Flash启动的架构:
-
 image-20201125230828425
image-20201125230828425 -
启动流程为:
- 上电后,CPU内置程序会从NAND Flash的特定地址(一般是第一个block块地址)读出Boot-Loader程序到CPU的内部内存中。
- CPU将控制权交给内部存储器中的Boot-Loader;
- Boot-Loader初始化SDRAM,再从NAND Flash中将主程序载入到SDRAM中;
- Boot-Loader将控制权交给主程序。
获取更多知识,请点击关注:
嵌入式Linux&ARM
CSDN博客
博客
知乎专栏