一、导言
通过笔记记录学习过程,不断进步。
mcropython系统的STM32开发板控制,HC-SR04超声波测距判断,L293D驱动电机组成避障小车。
二、组成
1、TPYBoardV103开发板(固件2018年4月)
2、HC-SR04超声波测距模块
3、0.96OLED显示模块
4、L293D芯片(可直接用L298驱动模块)
5、TT电机
三、连接
1、0.96OLED显示模块, 是SPI接口的,接线如下:
| OLED | TPYBoardV103 | |
|---|---|---|
| GND | GND | 电源地 |
| VCC | 3.3V | 电源(2.8V~5.5V) |
| D0 | X6 | 时钟线 |
| D1 | X8 | 数据线 |
| RES | Y10 | 复位线 |
| DC | Y9 | 数据/命令 |
| CS | NC (悬空) | 片选 |
2、HC-SR04超声波测距,是4线的,接线如下,使用了定时器2,上升下降沿捕促,GPIO注意与定时器对应,这里输入为“X1”,输出为“X2”
| HC-SR04 | TPYBoard | |
|---|---|---|
| VCC | 5V | |
| TRIG | X2 | 触发控制信号输入 |
| ECHO | X1 | 回响信号输出 |
| GND | GND |
3、L293D电机驱动,可同时驱动两个电机,每个通道提供600MA电流;使能端必须是高电平,才能激活电机,也可以加PWM控制电机的速度。
| L293D | TPYBoard | |
|---|---|---|
| 1 | X3 | 使能1 |
| 2 | Y3 | 输入1 |
| 7 | Y4 | 输入2 |
| 9 | X4 | 使能2 |
| 10 | Y1 | 输入3 |
| 15 | Y2 | 输入4 |
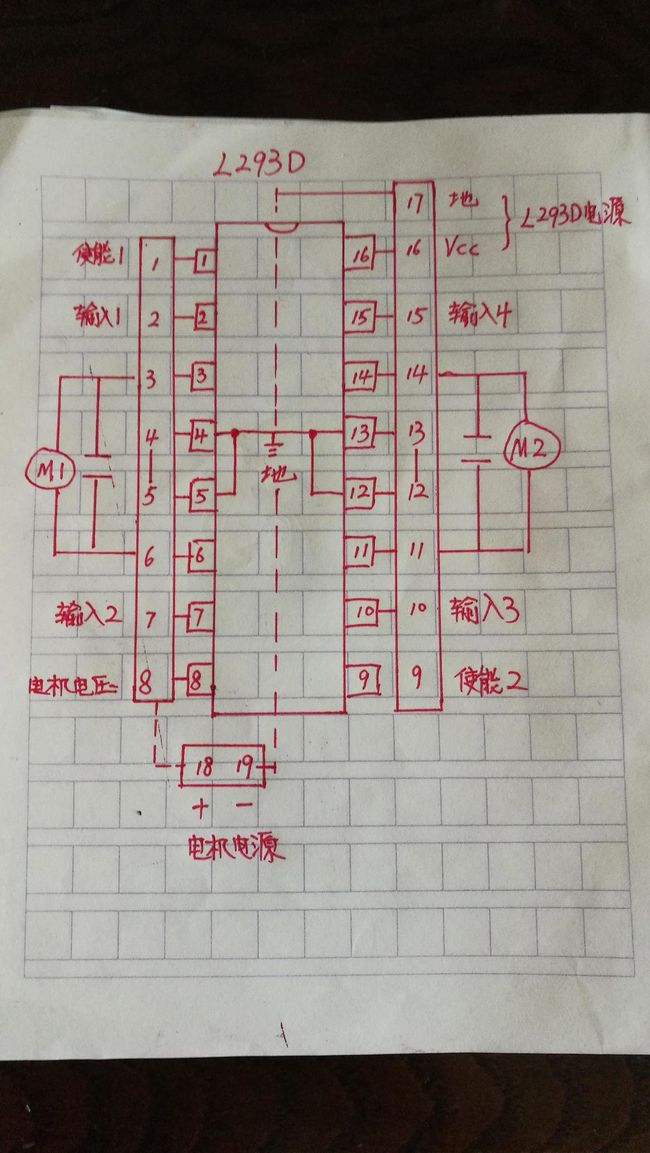
L293接线图
| 电动机驱动 | ||
|---|---|---|
| 输入1(3) | 输入2(4) | 动作 |
| 低 | 低 | 电机停转 |
| 低 | 高 | 电机正转 |
| 高 | 低 | 电机反转 |
| 高 | 高 | 电机停转 |
| TT马达 130减速电机 |
|---|
| 3-7.2V 双轴 |
| 3V时,电流170ma,转速约115转/分钟,扭力约0.7KGf.cm |
| 6V时,电流230ma,转速约转255/分钟,扭力约1.2KGf.cm |
| 7.2V时,电流250ma,转速约转320/分钟,扭力约1.5KGf.cm |
四、代码
1、main.py
import pyb
from pyb import Pin
from pyb import Timer
from ssd1306 import SSD1306
# SPI OLED显示
# OLED TPYBoardV102
# GND GND 电源地
# VCC 3.3V 电源(2.8V~5.5V)
# D0 X6 时钟线
# D1 X8 数据线
# RES Y10 复位线
# DC Y9 数据/命令
# CS NC (悬空) 片选
display = SSD1306(pinout={'dc': 'Y9',
'res': 'Y10'},
height=64,
external_vcc=False)
display.poweron()
display.init_display()
display.clear()
# 超声波测距
# HC-SR04 TPYBoard
# VCC 5V
# TRIG X2 触发控制信号输入
# ECHO X1 回响信号输出
# GND GND
Trig = Pin('X2',Pin.OUT_PP)
Echo = Pin('X1',Pin.IN)
ic_start=0
ic_width=0
#show=0
#distance=0.0
# Temer.IC Echo脉冲宽度,上升沿、下降沿输入捕获
timer_ic=Timer(2,prescaler=83,period=0x0fffffff) #1Mhz,计时周期值0x0fffffff
ic=timer_ic.channel(1,Timer.IC,pin=Echo,polarity=Timer.BOTH)
# 捕获Echo脉冲上升沿、下降沿时的回调函数,计算Echo时间,显示
def echo_width(timer):
global ic_start
global ic_width
#global show
#global distance
# 捕获Echo脉冲上升沿、下降沿时的计数
if Echo.value():
#获得上升沿时计数值
ic_start=ic.capture()
print('ic_start:',ic_start)
else:
ic_width=ic.capture()
print('ic_width:',ic_width)
#获得下降沿时计数值,减上升沿时计数值,获得高电平宽度
ic_width=ic.capture()-ic_start & 0x0fffffff
print('ic_width2:',ic_width)
#distance=round(ic_width/1000000*33299/2,2) #高电平计数,转换成距离CM
#print('distance:',distance)
#show=1
ic.callback(echo_width)
#间隔固定时间发送测距信号
def run(timer):
if Echo.value()==0:
Trig.value(1)
pyb.udelay(20)
Trig.value(0)
timer_=Timer(3,freq=2,callback=run)
#PYB L293D
# L293D TPYB
# 1 X3 使能1
# 2 Y3 输入1
# 7 Y4 输入2
# 9 X4 使能2
# 10 Y1 输入3
# 15 Y2 输入4
#左电机,输入端,正反转、停止
leftMotor1 = Pin('Y3',Pin.OUT_PP)
leftMotor2 = Pin('Y4',Pin.OUT_PP)
#右电机,输入端,正反转、停止
rightMotor1 = Pin('Y1',Pin.OUT_PP)
rightMotor2 = Pin('Y2',Pin.OUT_PP)
timer = Timer(9,freq=5000)#Timer与Pin有关,选择GPIO时要注意,对应
#电机使能端,并PWM控制速度
speedLeft =timer.channel(1,Timer.PWM,pin=Pin('X3',Pin.OUT_PP))
#speedLeft.pulse_width_percent(80)
speedright =timer.channel(2,Timer.PWM,pin=Pin('X4',Pin.OUT_PP))
#speedright.pulse_width_percent(80)
def go(speed): # 前进
pyb.delay(100)
speedLeft.pulse_width_percent(speed)
speedright.pulse_width_percent(speed)
leftMotor1.low()
leftMotor2.high()
rightMotor1.high()
rightMotor2.low()
def back(speed): #后退
pyb.delay(100)
speedLeft.pulse_width_percent(speed)
speedright.pulse_width_percent(speed)
leftMotor1.high()
leftMotor2.low()
rightMotor1.low()
rightMotor2.high()
def left(): #左转
pyb.delay(100)
speedLeft.pulse_width_percent(80)
speedright.pulse_width_percent(80)
leftMotor1.high()
leftMotor2.low()
rightMotor1.high()
rightMotor2.low()
def right(): #右转
pyb.delay(100)
speedLeft.pulse_width_percent(80)
speedright.pulse_width_percent(80)
leftMotor1.low()
leftMotor2.high()
rightMotor1.low()
rightMotor2.high()
def stop(): #停止
speedLeft.pulse_width_percent(100)
speedright.pulse_width_percent(100)
leftMotor1.low()
leftMotor2.low()
rightMotor1.low()
rightMotor2.low()
def measure(ic_width,dis=display): #测量距离,返回CM,显示距离
distance=round(ic_width/1000000*33299/2,2)
print('Distance:',distance)
print(distance,'cm')
dis.clear()
dis.draw_text(1,1,'distance:',size=1,space=1)
dis.draw_text(1,10,str(distance),size=1,space=1)
dis.draw_text(80,10,'cm',size=1,space=1)
#Write display buffer
dis.display()
return distance
def main():
pyb.delay(1000)
while True:
m=measure(ic_width)
if m>40:
go(100)
elif m<20:
stop()
pyb.delay(5000)
back(100)
pyb.delay(5000)
else:
left()
pyb.delay(10000)
right()
pyb.delay(10000)
stop()
pyb.delay(5000)
main()
2、ssd1306.py
# The MIT License (MIT)
#
# Copyright (c) 2014 Kenneth Henderick
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
import pyb
import fontnew
# Constants
DISPLAYOFF = 0xAE
SETCONTRAST = 0x81
DISPLAYALLON_RESUME = 0xA4
DISPLAYALLON = 0xA5
NORMALDISPLAY = 0xA6
INVERTDISPLAY = 0xA7
DISPLAYON = 0xAF
SETDISPLAYOFFSET = 0xD3
SETCOMPINS = 0xDA
SETVCOMDETECT = 0xDB
SETDISPLAYCLOCKDIV = 0xD5
SETPRECHARGE = 0xD9
SETMULTIPLEX = 0xA8
SETLOWCOLUMN = 0x00
SETHIGHCOLUMN = 0x10
SETSTARTLINE = 0x40
MEMORYMODE = 0x20
COLUMNADDR = 0x21
PAGEADDR = 0x22
COMSCANINC = 0xC0
COMSCANDEC = 0xC8
SEGREMAP = 0xA0
CHARGEPUMP = 0x8D
EXTERNALVCC = 0x10
SWITCHCAPVCC = 0x20
SETPAGEADDR = 0xB0
SETCOLADDR_LOW = 0x00
SETCOLADDR_HIGH = 0x10
ACTIVATE_SCROLL = 0x2F
DEACTIVATE_SCROLL = 0x2E
SET_VERTICAL_SCROLL_AREA = 0xA3
RIGHT_HORIZONTAL_SCROLL = 0x26
LEFT_HORIZONTAL_SCROLL = 0x27
VERTICAL_AND_RIGHT_HORIZONTAL_SCROLL = 0x29
VERTICAL_AND_LEFT_HORIZONTAL_SCROLL = 0x2A
# I2C devices are accessed through a Device ID. This is a 7-bit
# value but is sometimes expressed left-shifted by 1 as an 8-bit value.
# A pin on SSD1306 allows it to respond to ID 0x3C or 0x3D. The board
# I bought from ebay used a 0-ohm resistor to select between "0x78"
# (0x3c << 1) or "0x7a" (0x3d << 1). The default was set to "0x78"
DEVID = 0x3c
# I2C communication here is either
# or <> <> <> <>...
# These two values encode the Co (Continuation) bit as b7 and the
# D/C# (Data/Command Selection) bit as b6.
CTL_CMD = 0x80
CTL_DAT = 0x40
class SSD1306(object):
def __init__(self, pinout, height=32, external_vcc=True, i2c_devid=DEVID):
self.external_vcc = external_vcc
self.height = 32 if height == 32 else 64
self.pages = int(self.height / 8)
self.columns = 128
# Infer interface type from entries in pinout{}
if 'dc' in pinout:
# SPI
rate = 16 * 1024 * 1024
self.spi = pyb.SPI(1, pyb.SPI.MASTER, baudrate=rate, polarity=1, phase=0) # SCK: Y6: MOSI: Y8
self.dc = pyb.Pin(pinout['dc'], pyb.Pin.OUT_PP, pyb.Pin.PULL_DOWN)
self.res = pyb.Pin(pinout['res'], pyb.Pin.OUT_PP, pyb.Pin.PULL_DOWN)
self.offset = 0
else:
# Infer bus number from pin
if pinout['sda'] == 'X10':
self.i2c = pyb.I2C(1)
else:
self.i2c = pyb.I2C(2)
self.i2c.init(pyb.I2C.MASTER, baudrate=400000) # 400kHz
self.devid = i2c_devid
# used to reserve an extra byte in the image buffer AND as a way to
# infer the interface type
self.offset = 1
# I2C command buffer
self.cbuffer = bytearray(2)
self.cbuffer[0] = CTL_CMD
def clear(self):
self.buffer = bytearray(self.offset + self.pages * self.columns)
if self.offset == 1:
self.buffer[0] = CTL_DAT
def write_command(self, command_byte):
if self.offset == 1:
self.cbuffer[1] = command_byte
self.i2c.send(self.cbuffer, addr=self.devid, timeout=5000)
else:
self.dc.low()
self.spi.send(command_byte)
def invert_display(self, invert):
self.write_command(INVERTDISPLAY if invert else NORMALDISPLAY)
def display(self):
self.write_command(COLUMNADDR)
self.write_command(0)
self.write_command(self.columns - 1)
self.write_command(PAGEADDR)
self.write_command(0)
self.write_command(self.pages - 1)
if self.offset == 1:
self.i2c.send(self.buffer, addr=self.devid, timeout=5000)
else:
self.dc.high()
self.spi.send(self.buffer)
def set_pixel(self, x, y, state):
index = x + (int(y / 8) * self.columns)
if state:
self.buffer[self.offset + index] |= (1 << (y & 7))
else:
self.buffer[self.offset + index] &= ~(1 << (y & 7))
def init_display(self):
chargepump = 0x10 if self.external_vcc else 0x14
precharge = 0x22 if self.external_vcc else 0xf1
multiplex = 0x1f if self.height == 32 else 0x3f
compins = 0x02 if self.height == 32 else 0x12
contrast = 0xff # 0x8f if self.height == 32 else (0x9f if self.external_vcc else 0x9f)
data = [DISPLAYOFF,
SETDISPLAYCLOCKDIV, 0x80,
SETMULTIPLEX, multiplex,
SETDISPLAYOFFSET, 0x00,
SETSTARTLINE | 0x00,
CHARGEPUMP, chargepump,
MEMORYMODE, 0x00,
SEGREMAP | 0x10,
COMSCANDEC,
SETCOMPINS, compins,
SETCONTRAST, contrast,
SETPRECHARGE, precharge,
SETVCOMDETECT, 0x40,
DISPLAYALLON_RESUME,
NORMALDISPLAY,
DISPLAYON]
for item in data:
self.write_command(item)
self.clear()
self.display()
def poweron(self):
if self.offset == 1:
pyb.delay(10)
else:
self.res.high()
pyb.delay(1)
self.res.low()
pyb.delay(10)
self.res.high()
pyb.delay(10)
def poweroff(self):
self.write_command(DISPLAYOFF)
def contrast(self, contrast):
self.write_command(SETCONTRAST)
self.write_command(contrast)
def draw_text(self, x, y, string, size=1, space=1):
def pixel_x(char_number, char_column, point_row):
char_offset = x + char_number * size * fontnew.cols + space * char_number
pixel_offset = char_offset + char_column * size + point_row
return self.columns - pixel_offset
def pixel_y(char_row, point_column):
char_offset = y + char_row * size
return char_offset + point_column
def pixel_mask(char, char_column, char_row):
char_index_offset = ord(char) * fontnew.cols
return fontnew.bytes[char_index_offset + char_column] >> char_row & 0x1
pixels = (
(pixel_x(char_number, char_column, point_row),
pixel_y(char_row, point_column),
pixel_mask(char, char_column, char_row))
for char_number, char in enumerate(string)
for char_column in range(fontnew.cols)
for char_row in range(fontnew.rows)
for point_column in range(size)
for point_row in range(1, size + 1))
for pixel in pixels:
self.set_pixel(*pixel)
3、fontnew.py
# Originally from https://github.com/guyc/py-gaugette/blob/master/gaugette/font5x8.py
cols = 5
rows = 8
bytes = [
0x00, 0x00, 0x00, 0x00, 0x00,
0x3E, 0x5B, 0x4F, 0x5B, 0x3E,
0x3E, 0x6B, 0x4F, 0x6B, 0x3E,
0x1C, 0x3E, 0x7C, 0x3E, 0x1C,
0x18, 0x3C, 0x7E, 0x3C, 0x18,
0x1C, 0x57, 0x7D, 0x57, 0x1C,
0x1C, 0x5E, 0x7F, 0x5E, 0x1C,
0x00, 0x18, 0x3C, 0x18, 0x00,
0xFF, 0xE7, 0xC3, 0xE7, 0xFF,
0x00, 0x18, 0x24, 0x18, 0x00,
0xFF, 0xE7, 0xDB, 0xE7, 0xFF,
0x30, 0x48, 0x3A, 0x06, 0x0E,
0x26, 0x29, 0x79, 0x29, 0x26,
0x40, 0x7F, 0x05, 0x05, 0x07,
0x40, 0x7F, 0x05, 0x25, 0x3F,
0x5A, 0x3C, 0xE7, 0x3C, 0x5A,
0x7F, 0x3E, 0x1C, 0x1C, 0x08,
0x08, 0x1C, 0x1C, 0x3E, 0x7F,
0x14, 0x22, 0x7F, 0x22, 0x14,
0x5F, 0x5F, 0x00, 0x5F, 0x5F,
0x06, 0x09, 0x7F, 0x01, 0x7F,
0x00, 0x66, 0x89, 0x95, 0x6A,
0x60, 0x60, 0x60, 0x60, 0x60,
0x94, 0xA2, 0xFF, 0xA2, 0x94,
0x08, 0x04, 0x7E, 0x04, 0x08,
0x10, 0x20, 0x7E, 0x20, 0x10,
0x08, 0x08, 0x2A, 0x1C, 0x08,
0x08, 0x1C, 0x2A, 0x08, 0x08,
0x1E, 0x10, 0x10, 0x10, 0x10,
0x0C, 0x1E, 0x0C, 0x1E, 0x0C,
0x30, 0x38, 0x3E, 0x38, 0x30,
0x06, 0x0E, 0x3E, 0x0E, 0x06,
0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x5F, 0x00, 0x00,
0x00, 0x07, 0x00, 0x07, 0x00,
0x14, 0x7F, 0x14, 0x7F, 0x14,
0x24, 0x2A, 0x7F, 0x2A, 0x12,
0x23, 0x13, 0x08, 0x64, 0x62,
0x36, 0x49, 0x56, 0x20, 0x50,
0x00, 0x08, 0x07, 0x03, 0x00,
0x00, 0x1C, 0x22, 0x41, 0x00,
0x00, 0x41, 0x22, 0x1C, 0x00,
0x2A, 0x1C, 0x7F, 0x1C, 0x2A,
0x08, 0x08, 0x3E, 0x08, 0x08,
0x00, 0x80, 0x70, 0x30, 0x00,
0x08, 0x08, 0x08, 0x08, 0x08,
0x00, 0x00, 0x60, 0x60, 0x00,
0x20, 0x10, 0x08, 0x04, 0x02,
0x3E, 0x51, 0x49, 0x45, 0x3E,
0x00, 0x42, 0x7F, 0x40, 0x00,
0x72, 0x49, 0x49, 0x49, 0x46,
0x21, 0x41, 0x49, 0x4D, 0x33,
0x18, 0x14, 0x12, 0x7F, 0x10,
0x27, 0x45, 0x45, 0x45, 0x39,
0x3C, 0x4A, 0x49, 0x49, 0x31,
0x41, 0x21, 0x11, 0x09, 0x07,
0x36, 0x49, 0x49, 0x49, 0x36,
0x46, 0x49, 0x49, 0x29, 0x1E,
0x00, 0x00, 0x14, 0x00, 0x00,
0x00, 0x40, 0x34, 0x00, 0x00,
0x00, 0x08, 0x14, 0x22, 0x41,
0x14, 0x14, 0x14, 0x14, 0x14,
0x00, 0x41, 0x22, 0x14, 0x08,
0x02, 0x01, 0x59, 0x09, 0x06,
0x3E, 0x41, 0x5D, 0x59, 0x4E,
0x7C, 0x12, 0x11, 0x12, 0x7C,
0x7F, 0x49, 0x49, 0x49, 0x36,
0x3E, 0x41, 0x41, 0x41, 0x22,
0x7F, 0x41, 0x41, 0x41, 0x3E,
0x7F, 0x49, 0x49, 0x49, 0x41,
0x7F, 0x09, 0x09, 0x09, 0x01,
0x3E, 0x41, 0x41, 0x51, 0x73,
0x7F, 0x08, 0x08, 0x08, 0x7F,
0x00, 0x41, 0x7F, 0x41, 0x00,
0x20, 0x40, 0x41, 0x3F, 0x01,
0x7F, 0x08, 0x14, 0x22, 0x41,
0x7F, 0x40, 0x40, 0x40, 0x40,
0x7F, 0x02, 0x1C, 0x02, 0x7F,
0x7F, 0x04, 0x08, 0x10, 0x7F,
0x3E, 0x41, 0x41, 0x41, 0x3E,
0x7F, 0x09, 0x09, 0x09, 0x06,
0x3E, 0x41, 0x51, 0x21, 0x5E,
0x7F, 0x09, 0x19, 0x29, 0x46,
0x26, 0x49, 0x49, 0x49, 0x32,
0x03, 0x01, 0x7F, 0x01, 0x03,
0x3F, 0x40, 0x40, 0x40, 0x3F,
0x1F, 0x20, 0x40, 0x20, 0x1F,
0x3F, 0x40, 0x38, 0x40, 0x3F,
0x63, 0x14, 0x08, 0x14, 0x63,
0x03, 0x04, 0x78, 0x04, 0x03,
0x61, 0x59, 0x49, 0x4D, 0x43,
0x00, 0x7F, 0x41, 0x41, 0x41,
0x02, 0x04, 0x08, 0x10, 0x20,
0x00, 0x41, 0x41, 0x41, 0x7F,
0x04, 0x02, 0x01, 0x02, 0x04,
0x40, 0x40, 0x40, 0x40, 0x40,
0x00, 0x03, 0x07, 0x08, 0x00,
0x20, 0x54, 0x54, 0x78, 0x40,
0x7F, 0x28, 0x44, 0x44, 0x38,
0x38, 0x44, 0x44, 0x44, 0x28,
0x38, 0x44, 0x44, 0x28, 0x7F,
0x38, 0x54, 0x54, 0x54, 0x18,
0x00, 0x08, 0x7E, 0x09, 0x02,
0x18, 0xA4, 0xA4, 0x9C, 0x78,
0x7F, 0x08, 0x04, 0x04, 0x78,
0x00, 0x44, 0x7D, 0x40, 0x00,
0x20, 0x40, 0x40, 0x3D, 0x00,
0x7F, 0x10, 0x28, 0x44, 0x00,
0x00, 0x41, 0x7F, 0x40, 0x00,
0x7C, 0x04, 0x78, 0x04, 0x78,
0x7C, 0x08, 0x04, 0x04, 0x78,
0x38, 0x44, 0x44, 0x44, 0x38,
0xFC, 0x18, 0x24, 0x24, 0x18,
0x18, 0x24, 0x24, 0x18, 0xFC,
0x7C, 0x08, 0x04, 0x04, 0x08,
0x48, 0x54, 0x54, 0x54, 0x24,
0x04, 0x04, 0x3F, 0x44, 0x24,
0x3C, 0x40, 0x40, 0x20, 0x7C,
0x1C, 0x20, 0x40, 0x20, 0x1C,
0x3C, 0x40, 0x30, 0x40, 0x3C,
0x44, 0x28, 0x10, 0x28, 0x44,
0x4C, 0x90, 0x90, 0x90, 0x7C,
0x44, 0x64, 0x54, 0x4C, 0x44,
0x00, 0x08, 0x36, 0x41, 0x00,
0x00, 0x00, 0x77, 0x00, 0x00,
0x00, 0x41, 0x36, 0x08, 0x00,
0x02, 0x01, 0x02, 0x04, 0x02,
0x3C, 0x26, 0x23, 0x26, 0x3C,
0x1E, 0xA1, 0xA1, 0x61, 0x12,
0x3A, 0x40, 0x40, 0x20, 0x7A,
0x38, 0x54, 0x54, 0x55, 0x59,
0x21, 0x55, 0x55, 0x79, 0x41,
0x21, 0x54, 0x54, 0x78, 0x41,
0x21, 0x55, 0x54, 0x78, 0x40,
0x20, 0x54, 0x55, 0x79, 0x40,
0x0C, 0x1E, 0x52, 0x72, 0x12,
0x39, 0x55, 0x55, 0x55, 0x59,
0x39, 0x54, 0x54, 0x54, 0x59,
0x39, 0x55, 0x54, 0x54, 0x58,
0x00, 0x00, 0x45, 0x7C, 0x41,
0x00, 0x02, 0x45, 0x7D, 0x42,
0x00, 0x01, 0x45, 0x7C, 0x40,
0xF0, 0x29, 0x24, 0x29, 0xF0,
0xF0, 0x28, 0x25, 0x28, 0xF0,
0x7C, 0x54, 0x55, 0x45, 0x00,
0x20, 0x54, 0x54, 0x7C, 0x54,
0x7C, 0x0A, 0x09, 0x7F, 0x49,
0x32, 0x49, 0x49, 0x49, 0x32,
0x32, 0x48, 0x48, 0x48, 0x32,
0x32, 0x4A, 0x48, 0x48, 0x30,
0x3A, 0x41, 0x41, 0x21, 0x7A,
0x3A, 0x42, 0x40, 0x20, 0x78,
0x00, 0x9D, 0xA0, 0xA0, 0x7D,
0x39, 0x44, 0x44, 0x44, 0x39,
0x3D, 0x40, 0x40, 0x40, 0x3D,
0x3C, 0x24, 0xFF, 0x24, 0x24,
0x48, 0x7E, 0x49, 0x43, 0x66,
0x2B, 0x2F, 0xFC, 0x2F, 0x2B,
0xFF, 0x09, 0x29, 0xF6, 0x20,
0xC0, 0x88, 0x7E, 0x09, 0x03,
0x20, 0x54, 0x54, 0x79, 0x41,
0x00, 0x00, 0x44, 0x7D, 0x41,
0x30, 0x48, 0x48, 0x4A, 0x32,
0x38, 0x40, 0x40, 0x22, 0x7A,
0x00, 0x7A, 0x0A, 0x0A, 0x72,
0x7D, 0x0D, 0x19, 0x31, 0x7D,
0x26, 0x29, 0x29, 0x2F, 0x28,
0x26, 0x29, 0x29, 0x29, 0x26,
0x30, 0x48, 0x4D, 0x40, 0x20,
0x38, 0x08, 0x08, 0x08, 0x08,
0x08, 0x08, 0x08, 0x08, 0x38,
0x2F, 0x10, 0xC8, 0xAC, 0xBA,
0x2F, 0x10, 0x28, 0x34, 0xFA,
0x00, 0x00, 0x7B, 0x00, 0x00,
0x08, 0x14, 0x2A, 0x14, 0x22,
0x22, 0x14, 0x2A, 0x14, 0x08,
0xAA, 0x00, 0x55, 0x00, 0xAA,
0xAA, 0x55, 0xAA, 0x55, 0xAA,
0x00, 0x00, 0x00, 0xFF, 0x00,
0x10, 0x10, 0x10, 0xFF, 0x00,
0x14, 0x14, 0x14, 0xFF, 0x00,
0x10, 0x10, 0xFF, 0x00, 0xFF,
0x10, 0x10, 0xF0, 0x10, 0xF0,
0x14, 0x14, 0x14, 0xFC, 0x00,
0x14, 0x14, 0xF7, 0x00, 0xFF,
0x00, 0x00, 0xFF, 0x00, 0xFF,
0x14, 0x14, 0xF4, 0x04, 0xFC,
0x14, 0x14, 0x17, 0x10, 0x1F,
0x10, 0x10, 0x1F, 0x10, 0x1F,
0x14, 0x14, 0x14, 0x1F, 0x00,
0x10, 0x10, 0x10, 0xF0, 0x00,
0x00, 0x00, 0x00, 0x1F, 0x10,
0x10, 0x10, 0x10, 0x1F, 0x10,
0x10, 0x10, 0x10, 0xF0, 0x10,
0x00, 0x00, 0x00, 0xFF, 0x10,
0x10, 0x10, 0x10, 0x10, 0x10,
0x10, 0x10, 0x10, 0xFF, 0x10,
0x00, 0x00, 0x00, 0xFF, 0x14,
0x00, 0x00, 0xFF, 0x00, 0xFF,
0x00, 0x00, 0x1F, 0x10, 0x17,
0x00, 0x00, 0xFC, 0x04, 0xF4,
0x14, 0x14, 0x17, 0x10, 0x17,
0x14, 0x14, 0xF4, 0x04, 0xF4,
0x00, 0x00, 0xFF, 0x00, 0xF7,
0x14, 0x14, 0x14, 0x14, 0x14,
0x14, 0x14, 0xF7, 0x00, 0xF7,
0x14, 0x14, 0x14, 0x17, 0x14,
0x10, 0x10, 0x1F, 0x10, 0x1F,
0x14, 0x14, 0x14, 0xF4, 0x14,
0x10, 0x10, 0xF0, 0x10, 0xF0,
0x00, 0x00, 0x1F, 0x10, 0x1F,
0x00, 0x00, 0x00, 0x1F, 0x14,
0x00, 0x00, 0x00, 0xFC, 0x14,
0x00, 0x00, 0xF0, 0x10, 0xF0,
0x10, 0x10, 0xFF, 0x10, 0xFF,
0x14, 0x14, 0x14, 0xFF, 0x14,
0x10, 0x10, 0x10, 0x1F, 0x00,
0x00, 0x00, 0x00, 0xF0, 0x10,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xF0, 0xF0, 0xF0, 0xF0, 0xF0,
0xFF, 0xFF, 0xFF, 0x00, 0x00,
0x00, 0x00, 0x00, 0xFF, 0xFF,
0x0F, 0x0F, 0x0F, 0x0F, 0x0F,
0x38, 0x44, 0x44, 0x38, 0x44,
0x7C, 0x2A, 0x2A, 0x3E, 0x14,
0x7E, 0x02, 0x02, 0x06, 0x06,
0x02, 0x7E, 0x02, 0x7E, 0x02,
0x63, 0x55, 0x49, 0x41, 0x63,
0x38, 0x44, 0x44, 0x3C, 0x04,
0x40, 0x7E, 0x20, 0x1E, 0x20,
0x06, 0x02, 0x7E, 0x02, 0x02,
0x99, 0xA5, 0xE7, 0xA5, 0x99,
0x1C, 0x2A, 0x49, 0x2A, 0x1C,
0x4C, 0x72, 0x01, 0x72, 0x4C,
0x30, 0x4A, 0x4D, 0x4D, 0x30,
0x30, 0x48, 0x78, 0x48, 0x30,
0xBC, 0x62, 0x5A, 0x46, 0x3D,
0x3E, 0x49, 0x49, 0x49, 0x00,
0x7E, 0x01, 0x01, 0x01, 0x7E,
0x2A, 0x2A, 0x2A, 0x2A, 0x2A,
0x44, 0x44, 0x5F, 0x44, 0x44,
0x40, 0x51, 0x4A, 0x44, 0x40,
0x40, 0x44, 0x4A, 0x51, 0x40,
0x00, 0x00, 0xFF, 0x01, 0x03,
0xE0, 0x80, 0xFF, 0x00, 0x00,
0x08, 0x08, 0x6B, 0x6B, 0x08,
0x36, 0x12, 0x36, 0x24, 0x36,
0x06, 0x0F, 0x09, 0x0F, 0x06,
0x00, 0x00, 0x18, 0x18, 0x00,
0x00, 0x00, 0x10, 0x10, 0x00,
0x30, 0x40, 0xFF, 0x01, 0x01,
0x00, 0x1F, 0x01, 0x01, 0x1E,
0x00, 0x19, 0x1D, 0x17, 0x12,
0x00, 0x3C, 0x3C, 0x3C, 0x3C,
0x00, 0x00, 0x00, 0x00, 0x00]
五、图

实图

实图