机电课程总结
文章目录
- 第1章: 课程简介 机电系统组成
-
- 三、系统构成与工作原理
- 四、共性关键技术
-
- 精密机械技术
- 信息处理技术
- 自动控制技术
- 伺服驱动技术
- 检测传感技术
- 第2章: 总体设计
-
- 一、机电一体化系统设计方法、类型、准则
-
- 方法
-
- 1、机电互补法
- 2、结合(融合)法
- 3、组合法(前两者结合)
- 类型
-
- (1)开发性设计
- (2)适应性设计
- (3)变异性设计
- 准则
- 设计流程
- 第3章: 机械系统设计
-
- 一、机械系统定义及组成
- 二、传动部件设计
-
- 传动
- 减速器
- 联轴器
- 三、导向支撑部件设计
- 四、执行机构
- 五、 直线运动单元
- 第4章:计算机组织结构
-
- 一、嵌入式系统基本组成
- 二、有关术语
- 三、计算机体系结构
- 四、IO
- 第5章:控制系统
- 第6章:传感器检测
-
- 一、传感器的作用、分类与基本要求
- 二、 常用的位移测量传感器
- 第7章:伺服驱动系统设计
-
- 一、驱动元件的种类和特点
-
- 电液伺服系统
- 气压式驱动元件
- 电气式驱动元件
- 二、步进电动机
- 三、直流伺服电机
-
- 电液伺服系统
- 气压式驱动元件
- 电气式驱动元件
- 二、步进电动机
- 三、直流伺服电机
- 第8章: 插补算法
第1章: 课程简介 机电系统组成
三、系统构成与工作原理
五大要素:
动力装置:效率高、可靠性好
检测装置:体积小、精度高、抗干扰
执行元件:电气、液压、气动
机械本体:可靠、小型、美观
控制系统:高可靠性、柔性、智能化
机电一体化产品与非机电一体化产 品的本质区别在于前者具有计算机控制 的伺服系统。
四、共性关键技术
精密机械技术
强调精密机械设计技术的运用,即利用高、新技术手段,实 现结构上、材料上、性能上的变更,
满足:
减轻重量,减小体积
提高刚度,高精度
实现标准化、通用化、系列化
信息处理技术
包括信息的输入、变换、运算、存储及输出。 信息处理的工具是计算机,包括硬件、软件、 网络与通讯、数据库技术等; 机电系统中采用工业控制计算机、可编程控 制器、单片机等。
自动控制技术
机电系统自动控制包括位置控制、速度控制、力或力 矩控制等,自动控制的基础是自动控制原理,分为: 经典控制理论:研究单输入-单输出线性定常系统(以 传递函数为基础) 现代控制理论:研究多输入-多输出非线性、高精度多 变量系统(以状态方程为基础)
要求:稳、快、准
伺服驱动技术
检测传感技术
要求:能快速、精确地获得信息并在相应的应用环境中具 有高可靠性,是实现自动控制的重要环节。 主要内容包括:一是将物理量(位移、速度、加速度、力、 力矩、温度等)转换成一定的与其成比例的电量;二是对转 换的电信号的加工处理如放大、补偿、标定。
第2章: 总体设计
一、机电一体化系统设计方法、类型、准则
方法
1、机电互补法
即机械功能电子化,利用电子部件取代机械功能部件,简化机械 结构,提高系统的性能和质量,以弥补机械不足。
2、结合(融合)法
将各组成要素有机结合为一体构成专用或通用的功能部件,其要素之间机电参数匹配充分。
3、组合法(前两者结合)
将结合法制成的功能部件、功能模块,像积木那样组合成各种 机电一体化系统,故称组合法。如模块化机器人、模块化生产线等。 优点:缩短研制周期、节约工装设备费用,且有利于生产管理、 使用和维修。
类型
(1)开发性设计
是一个从无到有的创造过程,没有任何参照产品,根 据功能和性能要求,按照机电一体化设计原理,设计出满 足要求的产品。
如最初的3D打印机、绘图仪、雕刻机的设计就属于开发性设计。
(2)适应性设计
是在原有产品总的方案原理基本保持不变的情况下, 对产品进行局部更改。如用微电子技术代替原有的机械 结构进行局部改进设计,以使产品的性能和质量提高。
如:普通机床的数控化改造。
(3)变异性设计
是在设计方案和功能结构不变的情况下,仅改变现有产品 的规格尺寸,使之适应于量的方面有所变更的要求。
系列化:由于传递扭矩或速比发生变换而重新设计传动系统和结构尺 寸的设计,就属于变异性设计。
只改参数,最low
准则
在保证产品的功能、性能和使用寿命的前提下, 尽量降低成本。
即不要盲目追求“高、精、尖”,而是充分分 析用户需求,以最新的技术手段、最简单的结构、 最低的消耗,提供最满意的产品。
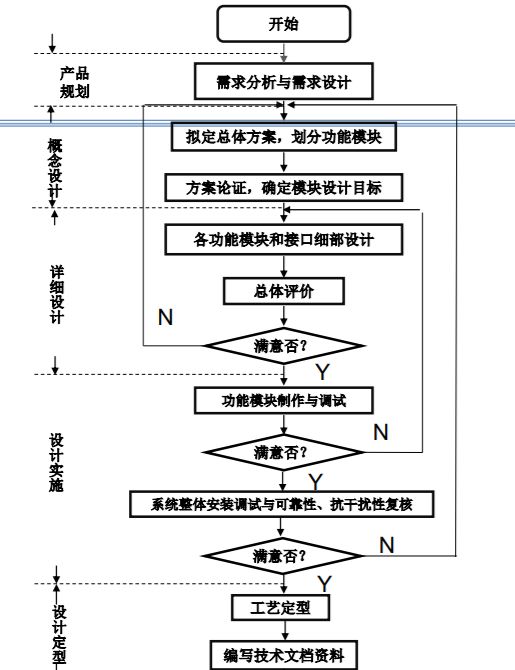
设计流程
第3章: 机械系统设计
一、机械系统定义及组成
要求:1. 体积、重量小; 2. 高刚度、精度; 3. 能快速响应、稳定性好。
三大部分机构:
传动机构:转速和转矩的变换机构,也是伺服系统 的一部分。
导向支撑机构:为机械系统各运动装置安全、准确 地完成其待定方向的运动提供支撑和导向。
执行机构:以完成操作为目的,一般要求有较高的 灵敏度、精确度。
二、传动部件设计
传动
齿轮机构:构件通过轮齿高副关节连接而成的机构。
连杆机构:通过转动、移动或球形等低副关节将杆状或块状构件 连接而成的机构。
螺旋机构:一种利用螺旋副传递运动和动力的机构。
滑动螺旋和滚动螺旋
同步带:通过传动带内表面上等距分布的横向齿和带轮 上的相应齿槽的啮合来传递运动。
减速器
减速器:用作原动件与工作机之间的减速传动装置 ,在 原动机和工作机或执行机构之间起匹配转速和传递转矩 的作用。
谐波减速器:利用柔性齿轮产生可控制的弹性变形波, 引起刚轮与柔轮的齿间相对错齿来传递动力和运动。
行星减速机:通过行星齿轮副减速。
RV减速器:在传统针摆行星传动的基础上发展而来,由一个 行星齿轮减速机的前级和一个摆线针轮减速机的后级组成。 摆线针轮传动是指由外齿轮齿廓为变态摆线、内齿轮轮齿为 圆销的一对内啮合齿轮和输出机构所组成的行星齿轮传动。
蜗轮蜗杆减速机:利用蜗轮蜗杆副减速
联轴器
联轴器:指联接两轴或轴与回转件,在传递运动和动力 过程中一同回转,在正常情况下不脱开的一种装置。
三、导向支撑部件设计
四、执行机构
1.工业机器人末端执行器
2.灵巧手
3.3D打印机喷头
五、 直线运动单元
组成:驱动、减速器、联轴器、传动机构、导向机构、 支撑机构。
第4章:计算机组织结构
一、嵌入式系统基本组成
二、有关术语
-
位(bit)
-
字节(byte)
规定一个字节由 八个二进制位构成,即 1 个字节等于 8 个比特
- 字和字长(word)
一个字通常由一个或多个(一般是字节的整数位)字节构成。
- 位编号
- 指令、指令系统和程序
- 寄存器
- 中断
三、计算机体系结构
四、IO
第5章:控制系统
第6章:传感器检测
一、传感器的作用、分类与基本要求
传感器一般由敏感元件、转换元件、转换电路三部分组成
分类
按输出信号的性质
开关型、模拟型、数字型
按被测量量来分类
接触、光敏、红外线
二、 常用的位移测量传感器
(1) 编码器
将机械转动的模拟量(位移)转换成以数字代码形式表示的电信号,这类传感器称为 编码器。编码器以其高精度、 高分辨率和高可靠性被广泛用于各种位移的测量
(2) 行程开关
开关:位置开关,是一种将机器信号转换为电气信号,以控制运动部件 位置或行程的自动控制电器。
(3) 距离传感器
(4) 视觉传感器简介
第7章:伺服驱动系统设计
一、驱动元件的种类和特点
与传统机器中的动力元件不同,机电控制系统中的驱动 元件,不但要提供运动的动力,同时还要具有可控的性 质。
电液伺服系统
液压系统主要由高压油泵、伺服阀、液压油缸和其 他辅助元件组成。
气压式驱动元件
由空气压缩机、二次冷却器、储气罐、干燥机、过滤器、减 压阀、管道、控制阀及气动执行装置构成。
电气式驱动元件
开环伺服系统
闭环伺服系统
半闭环伺服系统
二、步进电动机
一种将电脉冲信号变换成相应的角位移或 直线位移的机电执行元件。
三、直流伺服电机
动力,同时还要具有可控的性 质。
电液伺服系统
液压系统主要由高压油泵、伺服阀、液压油缸和其 他辅助元件组成。
气压式驱动元件
由空气压缩机、二次冷却器、储气罐、干燥机、过滤器、减 压阀、管道、控制阀及气动执行装置构成。
电气式驱动元件
开环伺服系统
闭环伺服系统
半闭环伺服系统
二、步进电动机
一种将电脉冲信号变换成相应的角位移或 直线位移的机电执行元件。