【计算机视觉】多视图几何使用OpenCV(Python)进行仿射变换
开始打江山啦,打江山啦,朕的江山从这里开始。
import numpy as np
import cv2
import matplotlib
from matplotlib import pyplot as plt
filename = 'tilef.jpg'
img = cv2.imread(filename)
plt.imshow(img ,cmap = 'gray')
plt.show()
随朕出征,一起征服星辰大海吧!
《CV中的多视图几何》——基础章节
获取图像中的坐标点并打印出来
我们可以看到,如果我们希望获取信息的点在图像中有十字标。

[(37.4032258064516, 96.33870967741936),
(263.2096774193548, 178.59677419354836),
(329.33870967741933, 52.79032258064518),
(155.9516129032258, 6.016129032258107)]
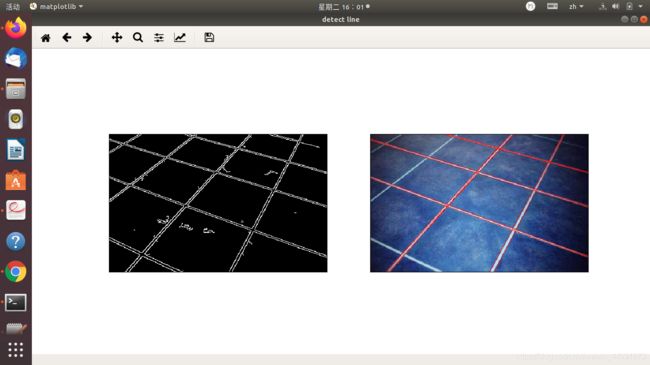
霍夫变化原理
与笛卡尔坐标相对应,我们建立霍夫坐标系,横坐标为斜率,纵坐标为截距。
 记住最重要的一点,笛卡尔坐标空间的一点映射到霍夫坐标系是一条直线,笛卡尔坐标系下的一条直线映射到霍夫坐标系下就是一个点。
记住最重要的一点,笛卡尔坐标空间的一点映射到霍夫坐标系是一条直线,笛卡尔坐标系下的一条直线映射到霍夫坐标系下就是一个点。
如果笛卡尔坐标系下确定了两个点,他们可以连接成一直线,在霍夫空间则为两条相交的直线。在霍夫空间通过一点的直线越多,证明在笛卡尔空间里,有越多的点实在一条直线上。
我们OpenCV里面用到的是
cv2.HoughLines(edges, 1, np.pi/180,200)
- 第一个参数是输入图像,且必须是二值图像,在进行霍夫变换之前需要采用阈值法的边缘检测;
- 第二和第三个参数分别是r,θ对应的精度;
- 第四个参数是阈值,判定为直线投票数的最小值;注意,投票数取决于直线上点的个数,因此这个阈值代表了检测到的直线的最短长度。
# find lines in an image by using the Hough transform
#change our image into gray one
gray = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,200)
plt.figure("detect line")
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
# hough transform
lines = cv2.HoughLines(edges,1,np.pi/180,160)
# 返回值中的每一个元素都是一对浮点数,表示检测到的直线参数(\rho,\theta)
# 其类型为np.ndarray
lines1 = lines[:,0,:]
#提取为为二维
for rho,theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img1,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img1,)
plt.xticks([]),plt.yticks([])
plt.show()
仿射变换
仿射变换是指图像可以通过一系列的几何变化来实现平移,旋转等,保持图像的平直性和平行性。(直线仍是直线,平行线仍是平行线)
为了得到仿射变换的4points,我们需要转换一下数据类型。我们先来探索一下:
>>> import numpy as np
>>> list=[(38.81034308370755, 94.5354816523041), (263.86192701379616, 177.25992232067), (329.6304264271554, 50.34727110895335), (156.98811546708743, 5.645244163935786)]
>>> list
[(38.81034308370755, 94.5354816523041), (263.86192701379616, 177.25992232067), (329.6304264271554, 50.34727110895335), (156.98811546708743, 5.645244163935786)]
>>> list[1]
(263.86192701379616, 177.25992232067)
>>> list[0]
(38.81034308370755, 94.5354816523041)
>>> list[1].tpye
Traceback (most recent call last):
File "" , line 1, in <module>
AttributeError: 'tuple' object has no attribute 'tpye'
>>> list[1].type
Traceback (most recent call last):
File "" , line 1, in <module>
AttributeError: 'tuple' object has no attribute 'type'
>>> pst1=np.float32(list)
>>> pst1
array([[ 38.810345, 94.535484],
[263.86194 , 177.25992 ],
[329.63043 , 50.34727 ],
[156.98811 , 5.645244]], dtype=float32)
>>> pst1.type
Traceback (most recent call last):
File "" , line 1, in <module>
AttributeError: 'numpy.ndarray' object has no attribute 'type'
>>> pts2 = np.float32([[0,0], [360,0], [0,420], [360,420]])
>>> pts2
array([[ 0., 0.],
[360., 0.],
[ 0., 420.],
[360., 420.]], dtype=float32)
按照上述方法在程序运行后打印出我们的两组点坐标。
$ python lab1.py
[[ 34.98387 95.53226 ]
[261.59677 179.40323 ]
[328.53226 50.370968]
[154.33871 5.209677]]
[[ 0. 0.]
[254. 0.]
[ 0. 400.]
[254. 400.]]
把我们检测到的点和霍夫变换直线检测都显示在窗口上
#we would like to display our points
cv2.circle(img1,(points1[0][0],points1[0][1]),5,(0,0,255),cv2.FILLED)
cv2.circle(img1,(points1[1][0],points1[1][1]),5,(0,255,0),cv2.FILLED)
cv2.circle(img1,(points1[2][0],points1[2][1]),5,(255,0,0),cv2.FILLED)
cv2.circle(img1,(points1[3][0],points1[3][1]),5,(0,0,0),cv2.FILLED)
cv2.imshow('original_images with detected points',img1)
cv2.waitKey(0)
 代码过于重复,更换成for循环
代码过于重复,更换成for循环
for i in range(0,4):
cv2.circle(...)
我们先尝试一个很简答的方法来看看效果,油管上的小例子:如何截取一个图片中的扑克牌?(翻一翻)
M=cv2.getPerspectiveTransform(points1,points2)
dst=cv2.warpPerspective(img1,M,(img_width,img_height))
cv2.imshow("img1",img1)
cv2.imshow("dst",dst)
cv2.waitKey(0)
 我们看到结果并不是太好。
我们看到结果并不是太好。
如何得到H矩阵
这么写真的太傻了。
A=np.array([[pts1[0][0],pts1[0][1],1,0,0,0,-pts2[0][0]*pts1[0][0],-pts2[0][0]*pts1[0][1],-pts2[0][0]],
[0,0,0,pts1[0][0],pts1[0][1],1,-pts2[0][1]*pts1[0][0],-pts2[0][1]*pts1[0][1],-pts2[0][1]],
[pts1[1][0],pts1[1][1],1,0,0,0,-pts2[1][0]*pts1[1][0],-pts2[1][0]*pts1[1][1],-pts2[1][0]],
[0,0,0,pts1[1][0],pts1[1][1],1,-pts2[1][1]*pts1[1][0],-pts2[1][1]*pts1[1][1],-pts2[1][1]],
[pts1[2][0],pts1[2][1],1,0,0,0,-pts2[2][0]*pts1[2][0],-pts2[2][0]*pts1[2][1],-pts2[2][0]],
[0,0,0,pts1[2][0],pts1[2][1],1,-pts2[2][1]*pts1[2][0],-pts2[2][1]*pts1[2][1],-pts2[2][1]],
[pts1[3][0],pts1[3][1],1,0,0,0,-pts2[3][0]*pts1[3][0],-pts2[3][0]*pts1[3][1],-pts2[3][0]],
[0,0,0,pts1[3][0],pts1[3][1],1,-pts2[3][1]*pts1[3][0],-pts2[3][1]*pts1[3][1],-pts2[3][1]]])
这纯属于思考认知错误。
#we would like to display our points
for i in range(0,4):
cv2.circle(img1,(pts1[i][0],pts1[i][1]),5,(0,0,255),cv2.FILLED)
cv2.imshow('original_images with detected points',img1)
cv2.waitKey(0)
#How to estimate the matrix H?
M=cv2.getPerspectiveTransform(pts1,pts2)
dst=cv2.warpPerspective(img1,M,(img_width,img_height))
cv2.imshow("img1",img1)
cv2.imshow("dst",dst)
cv2.waitKey(0)
还原平直线
第一次的想法是自己重新找点,这有些问题。
print('\n-------- Task 2: Metric rectification --------')
print('Task 2.1: transform 4 chosen points from projective image to affine image')
plt.figure('Please choose 4 points')
plt.imshow(affine_img)
y = plt.ginput(4)
plt.show()
print(y)
pts3=np.array(y)
pts3_homo = np.concatenate((pts3, np.ones((4, 1))), axis=1) # convert chosen pts to homogeneous coordinate
a1 = pts3_homo[0,:]
b1 = pts3_homo[1,:]
c1 = pts3_homo[2,:]
d1 = pts3_homo[3,:]
aff_hor_0 = np.cross(a1,d1)# image of first horizontal line on affine plane
aff_hor_1 = np.cross(b1,c1)# image of 2nd horizontal line on affine plane
aff_ver_0 = np.cross(a1,b1)# image of first vertical line on affine plane
aff_ver_1 = np.cross(c1,d1)# image of 2nd vertical line on affine plane
c00=np.dot(aff_hor_0[0],aff_ver_0[0])
c01=np.dot(aff_hor_0[0],aff_ver_0[1])+np.dot(aff_hor_0[1],aff_ver_0[0])
c02=np.dot(aff_hor_0[1],aff_ver_0[1])
C0 = np.hstack([c00,c01,c02])
c10=np.dot(aff_hor_1[0],aff_ver_1[0])
c11=np.dot(aff_hor_1[0],aff_ver_1[1])+np.dot(aff_hor_1[1],aff_ver_1[0])
c12=np.dot(aff_hor_1[1],aff_ver_1[1])
C1 = np.hstack([c10,c11,c12])
C = np.vstack([C0,C1])