OpenCV-Python也能实现人脸检测了
opencv中也可以实现深度学习中的人脸识别算法了。是怎么一回事呢?就是opencv中的DNN库,更新了好多深度学习的模块或者说是库函数,这样就让我们摆脱了安装庞大繁琐的深度学习框架。我们只需下载相应的权重文件,就可以实现复杂的人脸识别和人脸检测功能了。
人脸检测
1、下载权重文件和配置文件

2、话不多说,直接上代码
# -*-coding:utf-8-*-
"""
File Name: face_detection.py
Program IDE: PyCharm
Date: 2021/10/17
Create File By Author: Hong
"""
import cv2 as cv
# 权重文件和配置文件
model_bin = 'models/opencv_face_detector_uint8.pb'
config_text = 'models/opencv_face_detector.pbtxt'
def face_detection(video_path: str):
"""
人脸检测,使用DNN中的人脸检测模块
:param video_path: 传入视频文件
:return: 没有返回值
"""
# 加载模型权重和配置文件
net = cv.dnn.readNetFromTensorflow(model=model_bin, config=config_text)
cap = cv.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
# 若读不到视频帧,直接退出
if not ret:
break
h, w, c = frame.shape
# N, C, H, W ——> num_image,channel,height,width
# 设置输入网络的图像格式
blob = cv.dnn.blobFromImage(frame, 1.0, (300, 300), (104.0, 177.0, 123.0), False, False)
net.setInput(blob)
outs = net.forward() # 1×1×N×7 分别是批次、图像数量、人脸数、每个人脸7个值(后四个值分别是人脸框的左上角右下角)
# print(outs.shape)
for detection in outs[0, 0, :, :]: # 找出最后7个值
print(detection)
score = float(detection[2]) # 第三个值表示该人脸是人脸的概率
if score > 0.5: # 大于0.5概率才画框,找出人脸框左上角和右下角坐标
left = detection[3] * w
top = detection[4] * h
right = detection[5] * w
bottom = detection[6] * h
cv.rectangle(frame, (int(left), int(top)), (int(right), int(bottom)), (0, 0, 255), 2, 8, 0)
cv.putText(frame, str(score), (int(left), int(top)), 2, 1, (255, 0, 0)) # 在框的左上角处画出概率
cv.imshow('frame', frame)
c = cv.waitKey(1)
if c == 27 or 0xFF == ord('q'):
break
cap.release()
cv.destroyAllWindows()
if __name__ == '__main__':
path = 'images/video_face.mp4'
face_detection(path)
结果展示:

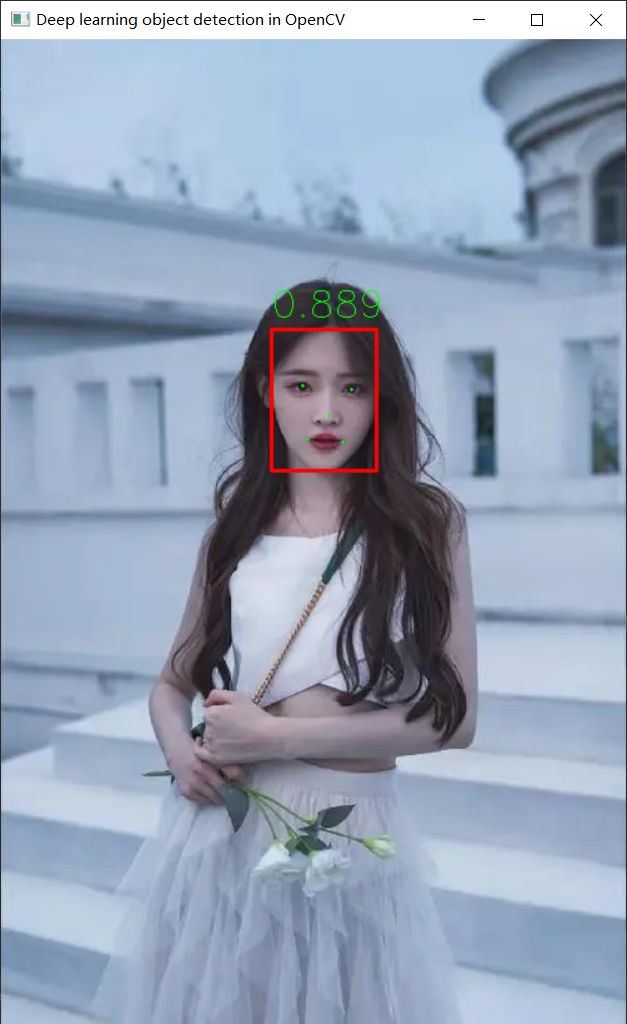
人脸检测和人脸关键点检测
1、下载权重文件

2、项目代码
# -*-coding:utf-8-*-
"""
File Name: scrfd_face.py
Program IDE: PyCharm
Date: 2021/10/17
Create File By Author: Hong
"""
import cv2
import argparse
import numpy as np
class SCRFD():
def __init__(self, onnxmodel, confThreshold=0.5, nmsThreshold=0.5):
self.inpWidth = 640
self.inpHeight = 640
self.confThreshold = confThreshold
self.nmsThreshold = nmsThreshold
self.net = cv2.dnn.readNet(onnxmodel)
self.keep_ratio = True
self.fmc = 3
self._feat_stride_fpn = [8, 16, 32]
self._num_anchors = 2
def resize_image(self, srcimg):
padh, padw, newh, neww = 0, 0, self.inpHeight, self.inpWidth
if self.keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.inpHeight, int(self.inpWidth / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
padw = int((self.inpWidth - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, padw, self.inpWidth - neww - padw, cv2.BORDER_CONSTANT,
value=0) # add border
else:
newh, neww = int(self.inpHeight * hw_scale) + 1, self.inpWidth
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_AREA)
padh = int((self.inpHeight - newh) * 0.5)
img = cv2.copyMakeBorder(img, padh, self.inpHeight - newh - padh, 0, 0, cv2.BORDER_CONSTANT, value=0)
else:
img = cv2.resize(srcimg, (self.inpWidth, self.inpHeight), interpolation=cv2.INTER_AREA)
return img, newh, neww, padh, padw
def distance2bbox(self, points, distance, max_shape=None):
x1 = points[:, 0] - distance[:, 0]
y1 = points[:, 1] - distance[:, 1]
x2 = points[:, 0] + distance[:, 2]
y2 = points[:, 1] + distance[:, 3]
if max_shape is not None:
x1 = x1.clamp(min=0, max=max_shape[1])
y1 = y1.clamp(min=0, max=max_shape[0])
x2 = x2.clamp(min=0, max=max_shape[1])
y2 = y2.clamp(min=0, max=max_shape[0])
return np.stack([x1, y1, x2, y2], axis=-1)
def distance2kps(self, points, distance, max_shape=None):
preds = []
for i in range(0, distance.shape[1], 2):
px = points[:, i % 2] + distance[:, i]
py = points[:, i % 2 + 1] + distance[:, i + 1]
if max_shape is not None:
px = px.clamp(min=0, max=max_shape[1])
py = py.clamp(min=0, max=max_shape[0])
preds.append(px)
preds.append(py)
return np.stack(preds, axis=-1)
def detect(self, srcimg):
img, newh, neww, padh, padw = self.resize_image(srcimg)
blob = cv2.dnn.blobFromImage(img, 1.0 / 128, (self.inpWidth, self.inpHeight), (127.5, 127.5, 127.5),
swapRB=True)
# Sets the input to the network
self.net.setInput(blob)
# Runs the forward pass to get output of the output layers
outs = self.net.forward(self.net.getUnconnectedOutLayersNames())
# inference output
scores_list, bboxes_list, kpss_list = [], [], []
for idx, stride in enumerate(self._feat_stride_fpn):
scores = outs[idx * self.fmc][0]
bbox_preds = outs[idx * self.fmc + 1][0] * stride
kps_preds = outs[idx * self.fmc + 2][0] * stride
height = blob.shape[2] // stride
width = blob.shape[3] // stride
anchor_centers = np.stack(np.mgrid[:height, :width][::-1], axis=-1).astype(np.float32)
anchor_centers = (anchor_centers * stride).reshape((-1, 2))
if self._num_anchors > 1:
anchor_centers = np.stack([anchor_centers] * self._num_anchors, axis=1).reshape((-1, 2))
pos_inds = np.where(scores >= self.confThreshold)[0]
bboxes = self.distance2bbox(anchor_centers, bbox_preds)
pos_scores = scores[pos_inds]
pos_bboxes = bboxes[pos_inds]
scores_list.append(pos_scores)
bboxes_list.append(pos_bboxes)
kpss = self.distance2kps(anchor_centers, kps_preds)
# kpss = kps_preds
kpss = kpss.reshape((kpss.shape[0], -1, 2))
pos_kpss = kpss[pos_inds]
kpss_list.append(pos_kpss)
scores = np.vstack(scores_list).ravel()
# bboxes = np.vstack(bboxes_list) / det_scale
# kpss = np.vstack(kpss_list) / det_scale
bboxes = np.vstack(bboxes_list)
kpss = np.vstack(kpss_list)
bboxes[:, 2:4] = bboxes[:, 2:4] - bboxes[:, 0:2]
ratioh, ratiow = srcimg.shape[0] / newh, srcimg.shape[1] / neww
bboxes[:, 0] = (bboxes[:, 0] - padw) * ratiow
bboxes[:, 1] = (bboxes[:, 1] - padh) * ratioh
bboxes[:, 2] = bboxes[:, 2] * ratiow
bboxes[:, 3] = bboxes[:, 3] * ratioh
kpss[:, :, 0] = (kpss[:, :, 0] - padw) * ratiow
kpss[:, :, 1] = (kpss[:, :, 1] - padh) * ratioh
indices = cv2.dnn.NMSBoxes(bboxes.tolist(), scores.tolist(), self.confThreshold, self.nmsThreshold)
for i in indices:
i = i[0]
xmin, ymin, xamx, ymax = int(bboxes[i, 0]), int(bboxes[i, 1]), int(bboxes[i, 0] + bboxes[i, 2]), int(
bboxes[i, 1] + bboxes[i, 3])
cv2.rectangle(srcimg, (xmin, ymin), (xamx, ymax), (0, 0, 255), thickness=2)
for j in range(5):
cv2.circle(srcimg, (int(kpss[i, j, 0]), int(kpss[i, j, 1])), 1, (0, 255, 0), thickness=-1)
cv2.putText(srcimg, str(round(scores[i], 3)), (xmin, ymin - 10), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0),
thickness=1)
return srcimg
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--imgpath', type=str, default='images/2.png', help='image path')
parser.add_argument('--onnxmodel', default='weights/scrfd_500m_kps.onnx', type=str,
choices=['weights/scrfd_500m_kps.onnx', 'weights/scrfd_2.5g_kps.onnx',
'weights/scrfd_10g_kps.onnx'], help='onnx model')
parser.add_argument('--confThreshold', default=0.5, type=float, help='class confidence')
parser.add_argument('--nmsThreshold', default=0.5, type=float, help='nms iou thresh')
args = parser.parse_args()
mynet = SCRFD(args.onnxmodel, confThreshold=args.confThreshold, nmsThreshold=args.nmsThreshold)
srcimg = cv2.imread(args.imgpath)
outimg = mynet.detect(srcimg)
winName = 'Deep learning object detection in OpenCV'
cv2.namedWindow(winName, cv2.WINDOW_AUTOSIZE)
cv2.imshow(winName, outimg)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果展示:
权重文件请关注微信公众号《AI与计算机视觉》,回复 ”人脸检测“ 获取。