ByteTrack: Multi-Object Tracking by Associating Every Detection Box阅读笔记
ByteTrack: Multi-Object Tracking by Associating Every Detection Box阅读笔记
-
- (一) Title
- (二) Summary
- (三) Research Object
- (四) Problem Statement
- (五) Method
- (六) Experiments
-
- 6.1 BYTE上的消融实验
- 6.2 在ByteTrack上的消融实验
- 6.3 MOT chanllenge结果
- (七) Conclusion
- (八) Notes
-
- 8.1 本文的思路
- 8.2 MOT中的目标检测
- 8.3 MOT中的数据关联
(一) Title

论文地址:https://arxiv.org/pdf/2110.06864.pdf
代码地址:https://github.com/ifzhang/ByteTrack
前言:截止20211019在MOT17上为SOTA,刚刚看源码的时候被项目的详细程度惊艳到了,而且猛然发现本作一作也是原来FairMOT的一作,不愧是大佬啊,忒强了
(二) Summary
背景介绍
MOT的任务是estimating bounding boxes and identities of objects。从具体任务上大致有3部分工作:检测(估计对象的bounding boxes),匹配和预测(确定对象的identities),在博主看来,检测任务上的改进的主要思路还是基于当前一些SOTA的检测框架,在本文中提供了一个匹配上的改进思路。
当前方法存在的问题
obtain identities by associating detection boxes whose scores are higher than a threshold。对于分数低的bounding boxes会直接丢弃,最终导致true object misssing以及fragmented trajectories。简单来说,从检测任务对接到跟踪任务时,采用阈值过滤掉检测网络输出的边界框,使得检测信息出现丢失,造成跟踪过程出现中断的情况,使得跟踪任务对检测任务的要求过高。
本文方法
提出了一种简单、有效、通用的association方法,这里对每一个检测框而不是高分检测框进行跟踪,对于low score的检测框利用他们同轨迹的相似性恢复真实目标,并将错误检测的背景忽略掉。将检测得到的边界框和预测结果
实验表现
- 应用到9个不同的最先进的trackers上,实现了IDF1 score的一致提升
- 构建的ByteTrack在单个V100上以30FPS的运行速度,在MOT17上实现了80.3 MOTA,77.3 IDF1以及63.1HOTA。
(三) Research Object
对于MOT任务中出现的missing detection以及fragmented trajectories,本文作者分析原因为在将检测的bounding boxes给到data association时设置了较高的阈值,导致一些低置信度的bounding boxes信息出现不可逆的丢失。为了避免低置信度边界框信息的丢失,需要额外地解决low confidence带来的FP(False Positive)问题,本文中通过引入二次关联,将能够同tracklets匹配上的low confidence boxes加入到tracklets中,无法匹配的boxes看成是背景,也就是False Positive,最终成功解决掉当前的问题。同时为了获得SOTA,采用YOLOX以及若干增强技术来提升检测器性能,并在MOT17和MOT20上取得了惊人的表现。
(四) Problem Statement
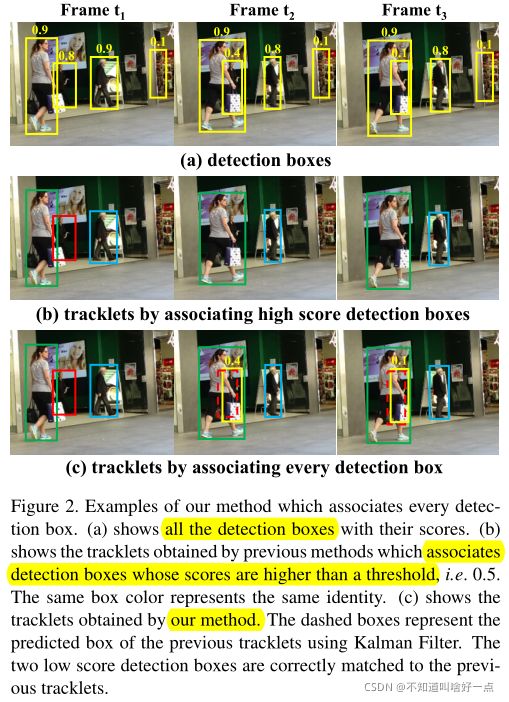
当前多目标跟踪存在着的一个难于解决的问题是:如下图中的(a)所示,当前目标检测的框架通过置信度阈值输出最终的边界框,当设置的阈值过大时,会出现missing detection以及fragmented trajectories。这种高阈值的设置是目前MOT中常常使用的方式,但是造成跟踪任务的missing detection的影响是不可逆的。
为了保证能够获取完整的trajectory轨迹,从理论上将同时考虑低置信度的检测以及kalman的预测能够更好地应对遮挡问题,然而,使用低置信度带来了新的问题:如何解决置信度较低带来的false positive(误检测)问题,这是现有的MOT工作中很少考虑处理的。本文中考虑到的一个解决方式为:在low score detection boxes中通过计算和tracklets的**相似性(motion similarity)**来识别objects和background。具体的实现方法为:
- 首先基于motion similarity将高置信度的detection boxes匹配到tracklets上。同样使用kalman滤波器预测当前轨迹在下一帧的位置。motion similarity的计算方式是通过计算kalman预测的boxes和low confidence boxes之间的IoU表示。
- 然后在unmatched tracklets中进行二次匹配,也就是通过预测和低置信度边界框之间的IoU进行二次匹配。此时遮挡的低置信度边界框能够得到很好地匹配,同时背景也能够过滤出来。
(五) Method
实现过程概述:
首先,使用所有的检测框,将检测框分为高分检测框和低分检测框。
t时刻,基于高分检测框匹配已有的轨迹,对于当前没有边界框能够匹配得上的轨迹,分析原因是occlusion或者motion blur产生的low confidence的边界框
将低置信度的匹配框同未匹配轨迹进行二次匹配,恢复低置信度边界框,同时将背景过滤掉
对应伪代码实现过程:
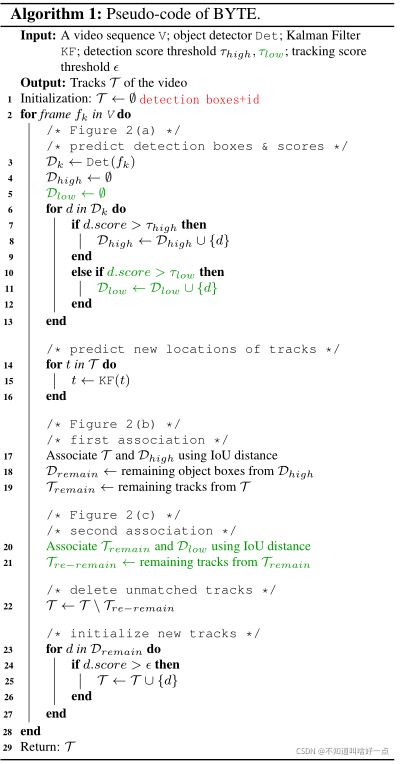
对于每一帧分步走:
- 通过Det获得detection boxes和scores,同时基于 τ high \tau_{\text {high }} τhigh 和 τ low \tau_{\text {low }} τlow 将所有的检测框分成两部分 D high \mathcal{D}_{\text {high }} Dhigh 和 D low \mathcal{D}_{\text {low }} Dlow ,将分数值超过 τ high \tau_{\text {high }} τhigh 的检测框归到 D high \mathcal{D}_{\text {high }} Dhigh 中,将置信度分数在 τ high \tau_{\text {high }} τhigh 和 τ low \tau_{\text {low }} τlow 之间的检测框归到 D low \mathcal{D}_{\text {low }} Dlow 中
- 对于所有轨迹 T \mathcal{T} T中的每一个track构建kalman滤波器。
- 在高分检测框 D high \mathcal{D}_{\text {high }} Dhigh 和所有轨迹 T \mathcal{T} T间进行关联。(相似性计算是通过IoU,匹配是同过匈牙利算法实现。对于IoU小于0.2的拒绝匹配)。并得到没有能够匹配上轨迹的检测框 D remain \mathcal{D}_{\text {remain }} Dremain 以及没有和检测框匹配上的轨迹 T remain \mathcal{T}_{\text {remain }} Tremain ,注意在这边匹配中也可以加入Re-ID特征。
- 第二次关联是在 D low \mathcal{D}_{\text {low }} Dlow 和 T remain \mathcal{T}_{\text {remain }} Tremain 之间进行关联,对于未匹配上的detection boxes看作是背景直接删除,对于未匹配上的轨迹记作 T re-remain \mathcal{T}_{\text {re-remain }} Tre-remain ,使用IoU作为相似度量,并没有使用appearance(低置信度的appearance不可靠)
- 在关联完成之后,从轨迹 T \mathcal{T} T中删除掉unmatched tracks T re-remain \mathcal{T}_{\text {re-remain }} Tre-remain ,这里为了实现long-range association,是将 T re-remain \mathcal{T}_{\text {re-remain }} Tre-remain 放到了 T lost \mathcal{T}_{\text {lost }} Tlost 中,只有当他出现在 T lost \mathcal{T}_{\text {lost }} Tlost 中的次数超过30帧时,才将轨迹从 T \mathcal{T} T中删除
- 在第一次关联之后,从没有匹配上的高置信度检测框 D remain \mathcal{D}_{\text {remain }} Dremain 中初始化新的轨迹。对于 D remain \mathcal{D}_{\text {remain }} Dremain 中的每一个检测框,如果检测分数超过 ε \varepsilon ε,并且在连续的两帧中出现了,我们初始化一个新的track(轨迹)。
ByteTrack框架
模型基于high-performance detector YOLOX以及本文提出的association 方法BYTE。
YOLOX是将YOLO系列detectors切换到anchor-free模式,并且采用了Mosaic,Mixup,SimOTA等来取得SOTA的性能
- 骨干网络同YOLOv5相同,采用CSPNet以及附加的PAN头。
- 在骨干网络之后有两个decouple头,一个用于分类,另一个head用于回归。同时增加了一个IoU-aware branch来预测predicted boxes和gt boxes之间的IoU。
- 回归部分通过GIoU loss约束;类别以及IoU heads通过binary cross entropy loss 约束。
需要注意的是MOT17中要求bounding boxes覆盖整个身体,即使是出现遮挡或者是仅仅是partly out of the image。这里本文没有对超过边界的行人进行裁剪,边界框的大小会超过图像尺寸。
(六) Experiments
实验设置
- 数据集:MOT17和MOT20,这两个数据集包含训练集和测试集,不含验证集。
- 使用评价指标为CLEAR度量,包括MOTA,FP,FN,IDs等,IDF1和HOTA用于评价跟踪的不同方面,MOTA更多地关注检测性能,IDF1评估了identity的表达能力并且更多地关注association的性能。HOTA用于平衡detection,association以及localization性能。
- 实现细节: τ high = 0.6 , τ low = 0.1 \tau_{\text {high }}=0.6,\tau_{\text {low }}=0.1 τhigh =0.6,τlow =0.1,轨迹的初始化score ε = 0.7 \varepsilon=0.7 ε=0.7
- YOLOX模型,使用COCOpretrained模型作为初始化权重,训练策略为在MOT17,CrowdHuman,Cityperson以及ETHZ上训练80格epoch。输入图像尺寸为 1440 × 800 1440 \times 800 1440×800.在多尺度训练中,短边从576到1024.在8块tesla V100上使用batch size48训练,使用SGD 1 × 1 0 − 3 1 \times 10^{-3} 1×10−3学习率, 5 × 1 0 − 4 5 \times 10^{-4} 5×10−4权重衰减以及0.9的动量,在第一个epcoh使用warm up,同时采用余弦退火策略。FPS在单个GPU上使用fp16精度和batch size1。
6.1 BYTE上的消融实验
可以看出在IDF1和IDs上的改进,说明了利用低置信度的分数能够更好地处理missing detection以及fragmented trajectories问题。
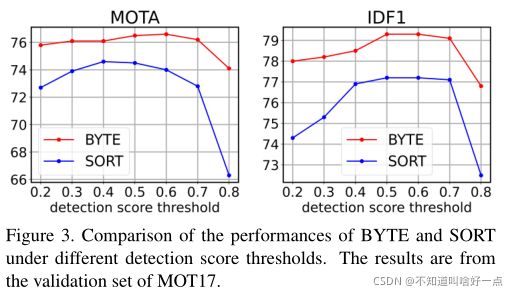
并且BYTE在检测阈值 τ high \tau_{\text {high }} τhigh 上具有鲁棒性
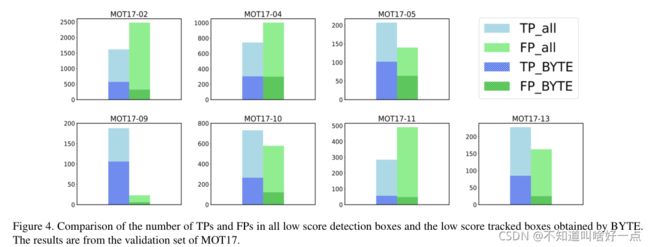
最后就是对于关联方式解决False Positive问题的实验结果(需要用图表表示处理)
首先将在 τ high , τ low \tau_{\text {high }},\tau_{\text {low }} τhigh ,τlow 之间的边界框筛选出来,接着根据gt boxes来确定TP和FP的划分。在使用二次关联之后会得到经过筛选后的边界框,进行TP和FP的划分,最终得到上图。
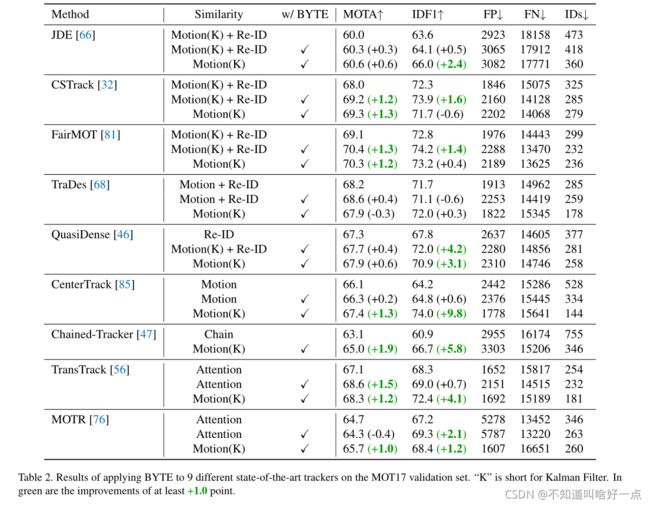
将BYTE应用到其他的trackers上
设计了两种不同的模型来将BYTE应用到JDE,CSTrack,FairMOT,TraDes,QuasiDense,CenterTrack,Chained-Tracker,TransTrack以及MOT上
- 将BYTE插入到不同trackers的原始关联方法中,这些原始的关联方法是采用appearance的。并且二次关联时候不考虑appearance的影响。
- 直接不带Re-ID的appearance特征。
从实验结果上两种模式BYTE都能够为几乎所有的评价指标MOTA,IDF1,IDs带来稳定的改进。BYTE的泛化能力较强。
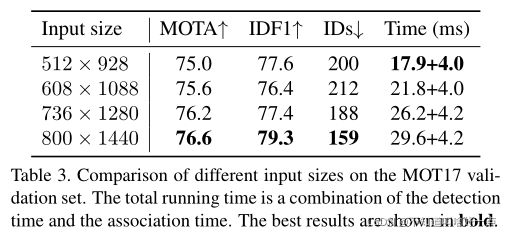
6.2 在ByteTrack上的消融实验
通过改变inference图像size来测试speed和accuracy之间的tradeoff
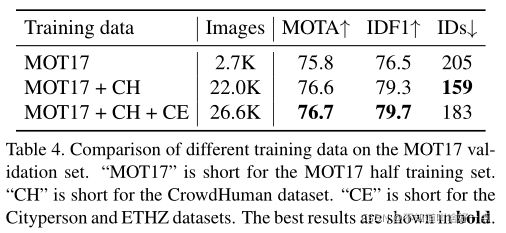
不同数据集训练带来的提升
不需要大量的训练数据也能够得到一个比较好的结果。
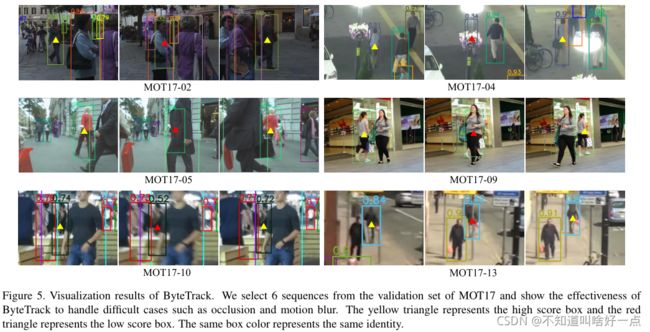
结果的可视化表示
主要是在遮挡和运动模糊上有了改善。
Tracklet interpolation(轨迹插值)离线增强
MOT17中有一些完全被遮挡住的行人,在ground-truth annotations都不可见,但是可以通过tracklet interpolation的方式获取到这些目标(通过预测解决遮挡问题),实际上就是已知 t 1 t_1 t1和 t 2 t_2 t2时刻是能够检测到目标,而目标在 t 1 t_1 t1和 t 2 t_2 t2的中间 t t t时刻发生了遮挡,怎么利用现有的观测来对遮挡情况进行处理。
B t = B t 1 + ( B t 2 − B t 1 ) t − t 1 t 2 − t 1 B_{t}=B_{t_{1}}+\left(B_{t_{2}}-B_{t_{1}}\right) \frac{t-t_{1}}{t_{2}-t_{1}} Bt=Bt1+(Bt2−Bt1)t2−t1t−t1
其中 B t 1 B_{t_{1}} Bt1是 t 1 t_1 t1时刻的检测框, B t 2 B_{t_{2}} Bt2是 t 2 t_2 t2时刻的检测框,同时设置一个超参数 σ \sigma σ,当 t 2 − t 1 ≤ σ t_{2}-t_{1} \leq \sigma t2−t1≤σ时,也就是对boxes的参数进行插值。
6.3 MOT chanllenge结果
在MOT17和MOT20上取得了state-of-the-art的成绩。
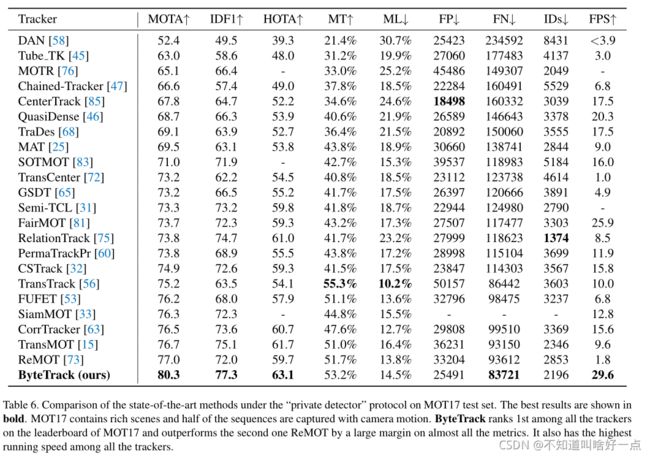
又快,又简单,训练数据还少。
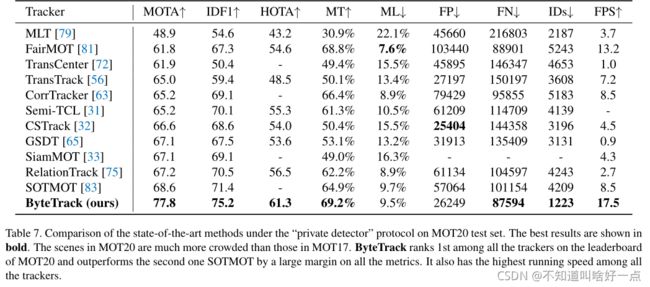
高的离谱啊!
(七) Conclusion
提出了一种新的数据关联方式data association方法BYTE,以及一个tracker:ByteTracker。以30FPS在MOT17上实现了80.3 MOTA,77.3 IDF1和63.1HOTA。ByteTracker对遮挡情况比较鲁棒。
(八) Notes
8.1 本文的思路
首先分析了检测中使用阈值在true positive/false positive之间trade-off的做法实则是舍弃了低置信度对应的bounding boxes,这种做法是不可逆的,相当于在后续跟踪过程中是没有办法考虑到低置信度的检测结果的(the occluded objects),从而导致missing detection以及fragmented trajectories(支离破碎的轨迹)。
接着,考虑需要使用低置信度的bounding boxes用于后续的预测过程。并思考如何解决低置信度带来的false positive(误检测)问题。
最后提出二次match tracklets的方式,第一次采用高置信度的bounding boxes生成tracklets(高置信度是为了避免引入背景),接着同时利用kalman滤波器预测bounding boxes和low confidence boxes,计算motion similarity(通过IoU表示),将low confidence的true positive匹配到tracklets中,同时将low confidence检测到的背景剔除。
8.2 MOT中的目标检测
popular detection包括:DPM, Faster R-CNN, SDP.
one-stage系列:RetinaNet,CenterNet,YOLO系列
使用单纯的检测器也能进行视频的跟踪,为什么还要引入跟踪呢?主要原因是视频序列中出现occlusions或者motion blur时,会造成missing detection或者low confidence detection,这种情况下,基于跟踪的方式可以考虑到上一帧的信息来提高视频的检测性能。
目前Tracking-by-detection多目标跟踪的两种思路:
Tracking负责检测,使用kalman进行预测,将预测框和检测框融合增强检测结果
使用previous frame中的tracked boxes来增强接下来一帧的feature representation。这是基于Transformer的跟踪方式。
8.3 MOT中的数据关联
data association是多目标跟踪任务的核心,它首先计算轨迹同检测框之间的相似度,然后根据相似度来进行匹配。主要涉及两个核心问题:如何计算检测框和轨迹的相似度,如何根据相似度实现检测框和轨迹的匹配
tracklets和bounding boxes的相似性度量
location,motion以及appearance是association的有用线索,SORT中使用location和motion来进行关联,相似性的计算主要是考虑到bounding boxes检测框和tracklets预测框之间的IoU。现在的一些做法是通过网络来学习object motions。在short-range matching中location和motion是比较准确的。而appearance在long-range matching中则比较有帮助,长时间遮挡时依旧能够通过appearance来对对象进行Re-ID。近期通过联合detecion和Re-ID模型在效率上越来越受欢迎。
tracklets和bounding boxes的匹配策略
在计算完相似度之后,使用匹配算法来给目标分配id。常用的匹配算法有匈牙利算法以及greedy assignment算法。目前一些工作中使用的匹配策略有:
SORT match the detection boxes to tracklets by once matching。
DeepSORT:first match the detection boxes to the most recent tracklets and the to the lost ones
MOTDT:first use appearance similarity to match and then use IoU similarity to match the unmatched tracklets。
QuasiDense:将appearance similarity通过一个双向softmax转换成概率,使用最近邻来进行匹配。
基于Transformer的框架使用注意力交互来隐式构建。
检测决定了跟踪任务的上界,而关联部分则决定是否能够更好地达到检测决定的上界。