视觉SLAM十四讲CH3代码解析及课后习题详解
eigenMatrix.cpp
#include
using namespace std;
#include
// Eigen 核心部分
#include
// 稠密矩阵的代数运算(逆,特征值等)
#include
using namespace std;
using namespace Eigen;
#define MATRIX_SIZE 50 宏定义 矩阵大小50
/****************************
* 本程序演示了 Eigen 基本类型的使用
****************************/
int main(int argc, char **argv) {
// Eigen 中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列
// 声明一个2*3的float矩阵
Matrix matrix_23;
// 同时,Eigen 通过 typedef 提供了许多内置类型,不过底层仍是Eigen::Matrix
// 例如 Vector3d 实质上是 Eigen::Matrix,即三维向量
Vector3d v_3d;
// 这是一样的
Matrix vd_3d;//声明一个3*1的float矩阵
// Matrix3d 实质上是 Eigen::Matrix
Matrix3d matrix_33 = Matrix3d::Zero(); //初始化为零
// 如果不确定矩阵大小,可以使用动态大小的矩阵
Matrix matrix_dynamic;
// 更简单的
MatrixXd matrix_x;
// 这种类型还有很多,我们不一一列举
// 下面是对Eigen阵的操作
// 输入数据(初始化)
matrix_23 << 1, 2, 3, 4, 5, 6;//第一行为1 2 3 第二行为4 5 6
// 输出
cout << "matrix 2x3 from 1 to 6: \n" << matrix_23 << endl;//输出2 * 3矩阵
// 用()访问矩阵中的元素
cout << "print matrix 2x3: " << endl;
for (int i = 0; i < 2; i++) {
for (int j = 0; j < 3; j++) cout << matrix_23(i, j) << "\t";
cout << endl;
}
// 矩阵和向量相乘(实际上仍是矩阵和矩阵)
v_3d << 3, 2, 1;//[3,2,1]
vd_3d << 4, 5, 6;//[4,5,6]
// 但是在Eigen里你不能混合两种不同类型的矩阵,像这样是错的
// Matrix result_wrong_type = matrix_23 * v_3d;
// error: no type named ‘ReturnType’ in ‘struct Eigen::ScalarBinaryOpTraits >
// 注意result是double型矩阵,而matrix_23是float型矩阵,因此必须将matrix_23转换成double型矩阵
// 应该显式转换
Matrix result = matrix_23.cast() * v_3d;//显式转换
cout << "[1,2,3;4,5,6]*[3,2,1]=" << result.transpose() << endl;//[1,2,3;4,5,6]*[3,2,1]
Matrix result2 = matrix_23 * vd_3d;
cout << "[1,2,3;4,5,6]*[4,5,6]: " << result2.transpose() << endl;//[1,2,3;4,5,6]*[4,5,6]
// 同样你不能搞错矩阵的维度
// 试着取消下面的注释,看看Eigen会报什么错
// error: static assertion failed: YOU_MIXED_MATRICES_OF_DIFFERENT_SIZES
// Eigen::Matrix result_wrong_dimension = matrix_23.cast() * v_3d;
// 一些矩阵运算
// 四则运算就不演示了,直接用+-*/即可。
matrix_33 = Matrix3d::Random(); // 随机数矩阵
cout << "random matrix(3 * 3 随机数矩阵): \n" << matrix_33 << endl;//3 * 3 随机数矩阵
cout << "transpose(转置): \n" << matrix_33.transpose() << endl; // 转置
cout << "sum(各元素和): " << matrix_33.sum() << endl; // 各元素和
cout << "trace(迹): " << matrix_33.trace() << endl; // 迹
cout << "times 10(数乘): \n" << 10 * matrix_33 << endl; // 数乘
cout << "inverse(逆): \n" << matrix_33.inverse() << endl; // 逆
cout << "det(行列式): " << matrix_33.determinant() << endl; // 行列式
// 特征值
// 实对称矩阵可以保证对角化成功
SelfAdjointEigenSolver eigen_solver(matrix_33.transpose() * matrix_33);
cout << "Eigen values(特征值) = \n" << eigen_solver.eigenvalues() << endl;//特征值
cout << "Eigen vectors(特征向量) = \n" << eigen_solver.eigenvectors() << endl;//特征向量
// 解方程
// 我们求解 matrix_NN * x = v_Nd 这个方程
// N的大小在前边的宏里定义,它由随机数生成
// 直接求逆自然是最直接的,但是求逆运算量大
Matrix matrix_NN
= MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);//系数矩阵
clock_t time_stt = clock(); // 计时
// 直接求逆
Matrix x = matrix_NN.inverse() * v_Nd;//v_Nd为Ax=b中的b 即x = A(T)*b
cout << "time of normal inverse is(求逆所花费的时间)"
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;//输出求逆所花费的时间
cout << "x = " << x.transpose() << endl;//输出x(T)
// 通常用矩阵分解来求,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);//colPivHouseholderQr()表示QR分解
cout << "time of Qr decomposition is(QR分解所花费的时间) "
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;//输出QR分解所花费的时间
cout << "x = " << x.transpose() << endl;//输出x(T)
// 对于正定矩阵,还可以用cholesky分解来解方程
time_stt = clock();
x = matrix_NN.ldlt().solve(v_Nd);//ldlt()表示cholesky分解
cout << "time of ldlt decomposition is(cholesky分解所花费的时间)"
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;//输出cholesky分解所花费的时间
cout << "x = " << x.transpose() << endl;//输出x(T)
return 0;
}
CmakeLists文件:
cmake_minimum_required(VERSION 2.8)
project(useEigen)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
# 添加Eigen头文件
include_directories("/usr/include/eigen3")
add_executable(eigenMatrix eigenMatrix.cpp)eigenGeometry.cpp
#include
#include
using namespace std;
#include
#include
using namespace Eigen;
// 本程序演示了 Eigen 几何模块的使用方法
int main(int argc, char **argv) {
// Eigen/Geometry 模块提供了各种旋转和平移的表示
// 3D 旋转矩阵直接使用 Matrix3d 或 Matrix3f
Matrix3d rotation_matrix = Matrix3d::Identity();
// 旋转向量使用 AngleAxis, 它底层不直接是Matrix,但运算可以当作矩阵(因为重载了运算符)
AngleAxisd rotation_vector(M_PI / 4, Vector3d(0, 0, 1)); //沿 Z 轴旋转 45 度
cout.precision(3);//输出3位有效数字
cout << "rotation matrix =\n" << rotation_vector.matrix() << endl; //用matrix()转换成矩阵 可以想象原来坐标系旋转45度后变成了根号2那个位置
// 也可以直接赋值
rotation_matrix = rotation_vector.toRotationMatrix();
// 用 AngleAxis 可以进行坐标变换
Vector3d v(1, 0, 0);//[1,0,0]
Vector3d v_rotated = rotation_vector * v;//[0.707,-0.707,0.707;0.707,0.707;0,0,1] * [1,0,0]
cout << "(1,0,0) after rotation (by angle axis) = " << v_rotated.transpose() << endl;//输出[0.707,-0.707,0.707;0.707,0.707;0,0,1] * [1,0,0]
// 或者用旋转矩阵
v_rotated = rotation_matrix * v;//rotation_matrix * [1,0,0]
cout << "(1,0,0) after rotation (by matrix) = " << v_rotated.transpose() << endl;//输出rotation_matrix * [1,0,0]
// 欧拉角: 可以将旋转矩阵直接转换成欧拉角
Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX顺序,即yaw-pitch-roll顺序
//[0.707,-0.707,0.707;0.707,0.707;0,0,1]的欧拉角为PI/4
cout << "yaw pitch roll = " << euler_angles.transpose() << endl;//输出欧拉角为PI/4 [0.785,-0,0]
// 欧氏变换矩阵使用 Eigen::Isometry
Isometry3d T = Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵
T.rotate(rotation_vector); // 按照rotation_vector进行旋转
T.pretranslate(Vector3d(1, 3, 4)); // 把平移向量设成(1,3,4)
// t(0,3) = 1;t(1,3) = 3; t(2,3) = 4; // 把平移向量设成(1,3,4)
cout << "Transform matrix = \n" << T.matrix() << endl;
// 用变换矩阵进行坐标变换
Vector3d v_transformed = T * v; // 相当于R*v+t
cout << "v tranformed = " << v_transformed.transpose() << endl;//[1,0,0] --> [0.707,0.707,0]
// [0.707,0.707,0] + [1,3,4] = [1.707,3.707,4] -->三位有效数字 [1.71,3.71,4] <-- R*v+t
// 对于仿射和射影变换,使用 Eigen::Affine3d 和 Eigen::Projective3d 即可,略
// 四元数
// 可以直接把AngleAxis赋值给四元数,反之亦然
Quaterniond q = Quaterniond(rotation_vector);
cout << "quaternion from rotation vector = " << q.coeffs().transpose()
<< endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部
// 也可以把旋转矩阵赋给它
q = Quaterniond(rotation_matrix);
cout << "quaternion from rotation matrix = " << q.coeffs().transpose() << endl;
// 使用四元数旋转一个向量,使用重载的乘法即可
v_rotated = q * v; // 注意数学上是qvq^{-1}
cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;//(1,0,0) after rotation = 0.707 0.707 0
// 用常规向量乘法表示,则应该如下计算
cout << "should be equal to " << (q * Quaterniond(0, 1, 0, 0) * q.inverse()).coeffs().transpose() << endl;
//should be equal to 0.707 0.707 0 0
return 0;
}
CmakeLists文件:
cmake_minimum_required( VERSION 2.8 )
project( geometry )
# 添加Eigen头文件
include_directories( "/usr/include/eigen3" )
add_executable(eigenGeometry eigenGeometry.cpp)
coordinateTransform.cpp
#include
#include
#include
#include //Eigen核心模块
#include //Eigen几何模块
using namespace std;
using namespace Eigen;
//坐标变换
//已知q1,t1,p1以及q2,t2,求解q2
int main(int argc, char** argv) {
Quaterniond q1(0.35, 0.2, 0.3, 0.1), q2(-0.5, 0.4, -0.1, 0.2); //位姿,以Tcw形式存储
q1.normalize();//将q1归一化
q2.normalize();//将q2归一化
Vector3d t1(0.3, 0.1, 0.1), t2(-0.1, 0.5, 0.3);//平移向量
Vector3d p1(0.5, 0, 0.2);
Isometry3d T1w(q1), T2w(q2);
T1w.pretranslate(t1);
T2w.pretranslate(t2);
Vector3d p2 = T2w * T1w.inverse() * p1;
cout << endl << p2.transpose() << endl;
return 0;
}
plotTrajectory.cpp
#include
#include //Eigen核心模块
#include
// 本例演示了如何画出一个预先存储的轨迹
using namespace std;
using namespace Eigen;
//以Twr格式存储位姿
//该txt文件中每行的格式为:time, tx, ty, tx, qx, qy, qz, qw
// path to trajectory file
string trajectory_file = "/home/liqiang/slambook2/ch3/examples/trajectory.txt";//相机的轨迹文件
//string trajectory_file = "../trajectory.txt";//或者使用下面这种表达方式
void DrawTrajectory(vector>);
//Eigen::aligned_allocator表示内存管理方法
//向量类容器中的元素是Isometry3d,内存管理方法是Eigen::aligned_allocator
int main(int argc, char **argv) {
vector> poses;
ifstream fin(trajectory_file);
if (!fin)//如果不能打开文件
{
cout << "cannot find trajectory file at " << trajectory_file << endl;//输出不能读取文件
return 1;
}
while (!fin.eof()) //如果此时fin并不是end of file,那么执行以下内容
{
double time, tx, ty, tz, qx, qy, qz, qw;//后面四个为四元数,最后一个为实部
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Isometry3d Twr(Quaterniond(qw, qx, qy, qz));//Quaterniond 四元数
Twr.pretranslate(Vector3d(tx, ty, tz));
poses.push_back(Twr);
}
cout << "read total " << poses.size() << " pose entries" << endl;//输出读取到多少个位姿
// draw trajectory in pangolin
DrawTrajectory(poses); //调用DrawTrajectory()函数进行绘图
return 0;
}
/*******************************************************************************************/
void DrawTrajectory(vector> poses) {
// create pangolin window and plot the trajectory(创建pangolin窗口和绘制轨迹)
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);//分别表示窗口名、窗口宽度和窗口高度
glEnable(GL_DEPTH_TEST);//启用深度渲染,当需要显示3D模型时需要打开,根据目标的远近自动隐藏被遮挡的模型
glEnable(GL_BLEND); //表示窗口使用颜色混合模式,让物体显示半透明效果
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);//GL_SRC_ALPHA表示使用源颜色的alpha值作为权重因子,GL_ONE_MINUS_SRC_ALPHA表示用1.0-源颜色的alpha值作为权重因子
//创建一个观察相机视图
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
//ProjectionMatrix中各参数依次为图像宽度=1024、图像高度=768、fx=500、fy=500、cx=512、cy=389、最近距离=0.1、最远距离=1000
//ModelViewLookAt中各参数依次为相机的三维位置(0,-0.1,-1.8),观看视点的三维位置(0,0,0)和设置相机各轴的正方向(0,-1,0),右下前为(0,0,0),右上前为(0,-1,0)
//比如,ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)表示相机在(0, -0.1, -1.8)位置处观看视点(0, 0, 0),并设置相机XYZ轴正方向为(0,-1,0),即右上前
//创建交互视图,用于显示上一步相机所观测到的内容
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
//SetBounds()内的前4个参数分别表示交互视图的大小,均为相对值,范围在0.0至1.0之间
//第1个参数表示bottom,即为视图最下面在整个窗口中的位置
//第2个参数为top,即为视图最上面在整个窗口中的位置
//第3个参数为left,即视图最左边在整个窗口中的位置
//第4个参数为right,即为视图最右边在整个窗口中的位置
//第5个参数为aspect,表示横纵比
while (pangolin::ShouldQuit() == false) //ShouldQuit()检测是否关闭OpenGL窗口,如果没有关闭则执行
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);//清空颜色和深度缓存,这样每次都会刷新显示,不至于前后帧的颜色信息相互干扰
d_cam.Activate(s_cam);//激活显示,并设置状态矩阵
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);//将背景显示为白色
glLineWidth(1);//设置线宽
for (size_t i = 0; i < poses.size(); i++) {
// 画每个位姿的三个坐标轴
Vector3d Ow = poses[i].translation();//相机坐标系的坐标原点(0, 0, 0)在世界系下的坐标
Vector3d Xw = poses[i] * (0.1 * Vector3d(1, 0, 0)); //相机坐标系中的点(0.1, 0, 0)在世界坐标系下的坐标
Vector3d Yw = poses[i] * (0.1 * Vector3d(0, 1, 0)); //相机坐标系中的点(0, 0.1, 0)在世界坐标系下的坐标
Vector3d Zw = poses[i] * (0.1 * Vector3d(0, 0, 1)); //相机坐标系中的点(0, 0, 0.1)在世界坐标系下的坐标
//绘制直线OA、OB和OC分别表示该时刻相机坐标系的X轴、Y轴和Z轴
glBegin(GL_LINES);
glColor3f(1.0, 0.0, 0.0);//X轴用红色表示
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Xw[0], Xw[1], Xw[2]);
glColor3f(0.0, 1.0, 0.0);//Y轴用绿色表示
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Yw[0], Yw[1], Yw[2]);
glColor3f(0.0, 0.0, 1.0);//Z轴用蓝色表示
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Zw[0], Zw[1], Zw[2]);
glEnd();//对应于glBegin()
}
// 画出连线p1p2
for (size_t i = 0; i < poses.size(); i++) {
glColor3f(0.0, 0.0, 0.0);//设置直线颜色为黑色
glBegin(GL_LINES);//绘制直线p1p2
glLineWidth(2); //线宽设置为2
auto p1 = poses[i], p2 = poses[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();//执行后期渲染、事件处理和帧交换,按照前面的设置进行最终的显示
usleep(5000); // sleep 5 ms
}
}
include_directories("/usr/include/eigen3")
add_executable(coordinateTransform coordinateTransform.cpp)
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(plotTrajectory plotTrajectory.cpp)
target_link_libraries(plotTrajectory ${Pangolin_LIBRARIES})执行效果:
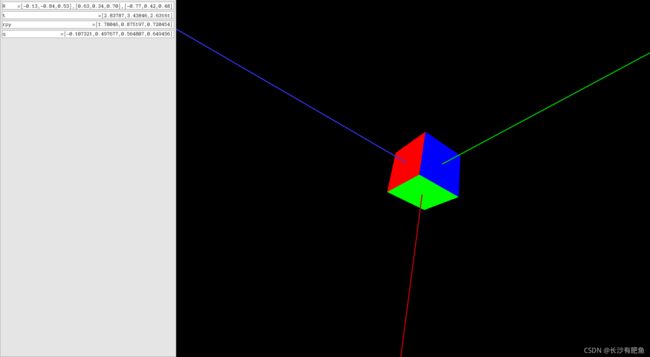
visualizeGeometry.cpp
#include
#include
using namespace std;
#include //Eigen核心模块
#include //Eigen几何模块
using namespace Eigen;
#include
struct RotationMatrix
{
Matrix3d matrix = Matrix3d::Identity();//Matrix3d::Identity()表示3*3单位阵
};
//重载结构体RotationMatrix的输出流运算符<<
ostream &operator<<(ostream &out, const RotationMatrix &r) {
out.setf(ios::fixed); //fixed表示用正常的记数方法显示浮点数
Matrix3d matrix = r.matrix;
out << '=';
//先out.setf(ios::fixed),后setprecision(2),效果为保留小数点后两位
out << "[" << setprecision(2) << matrix(0, 0) << "," << matrix(0, 1) << "," << matrix(0, 2) << "],"
<< "[" << matrix(1, 0) << "," << matrix(1, 1) << "," << matrix(1, 2) << "],"
<< "[" << matrix(2, 0) << "," << matrix(2, 1) << "," << matrix(2, 2) << "]";
return out;
}
//重载结构体RotationMatrix的输入流运算符>>
istream &operator>>(istream &in, RotationMatrix &r) {
return in;
}
struct TranslationVector {
Vector3d trans = Vector3d(0, 0, 0);
};
//重载结构体TranslationVector的输出流运算符<<
ostream &operator<<(ostream &out, const TranslationVector &t) {
out << "=[" << t.trans(0) << ',' << t.trans(1) << ',' << t.trans(2) << "]";
return out;
}
//重载结构体TranslationVector的输入流运算符>>
istream &operator>>(istream &in, TranslationVector &t) {
return in;
}
struct QuaternionDraw {
Quaterniond q;
};
//重载结构体QuaternionDraw的输出流运算符<<
ostream &operator<<(ostream &out, const QuaternionDraw quat) {
auto c = quat.q.coeffs();
out << "=[" << c[0] << "," << c[1] << "," << c[2] << "," << c[3] << "]";
return out;
}
//重载结构体QuaternionDraw的输出流运算符<<
istream &operator>>(istream &in, const QuaternionDraw quat) {
return in;
}
int main(int argc, char **argv)
{
//创建pangolin窗口
pangolin::CreateWindowAndBind("visualize geometry", 1000, 600);//分别表示窗口名visualize geometry、窗口宽度=1000和窗口高度=600
glEnable(GL_DEPTH_TEST); //启用深度渲染,当需要显示3D模型时需要打开,根据目标的远近自动隐藏被遮挡的模型
//创建一个观察相机视图,包括投影矩阵和相机视角
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1000, 600, 420, 420, 500, 300, 0.1, 1000),
pangolin::ModelViewLookAt(3, 3, 3, 0, 0, 0, pangolin::AxisY)
);
//ProjectionMatrix()中各参数依次为图像宽度=1000、图像高度=600、fx=420、fy=420、cx=500、cy=300、最近距离=0.1和最远距离=1000
//ModelViewLookAt()中各参数为相机位置,被观察点位置和相机哪个轴朝上
//比如,ModelViewLookAt(3, 3, 3, 0, 0, 0, pangolin::AxisY)表示相机在(3, 3, 3)位置处观看视点(0, 0, 0)
const int UI_WIDTH = 500;//用户界面所占宽度,从左边算起
//创建交互视图,用于显示上一步相机所观测到的内容
pangolin::View &d_cam = pangolin::CreateDisplay().
SetBounds(0.0, 1.0, pangolin::Attach::Pix(UI_WIDTH), 1.0, -1000.0f / 600.0f).
SetHandler(new pangolin::Handler3D(s_cam));
//SetBounds()内的前4个参数分别表示交互视图的大小,均为相对值,范围在0.0至1.0之间
//第1个参数表示bottom,即为视图最下面在整个窗口中的位置
//第2个参数为top,即为视图最上面在整个窗口中的位置
//第3个参数为left,即视图最左边在整个窗口中的位置
//第4个参数为right,即为视图最右边在整个窗口中的位置
//第5个参数为aspect,表示横纵比
//设置UI界面
pangolin::Var rotation_matrix("ui.R", RotationMatrix());//显示旋转矩阵
pangolin::Var translation_vector("ui.t", TranslationVector());//显示平移向量
pangolin::Var euler_angles("ui.rpy", TranslationVector());//显示欧拉角
pangolin::Var quaternion("ui.q", QuaternionDraw());//显示四元数
pangolin::CreatePanel("ui").SetBounds(0.0, 1.0, 0.0, pangolin::Attach::Pix(UI_WIDTH));//设置用户界面的大小
while (!pangolin::ShouldQuit()) //如果没有关闭OpenGL窗口,则执行
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); //清空颜色和深度缓存,使每一帧之间互不干扰
d_cam.Activate(s_cam);//激活显示,设置相机状态
pangolin::OpenGlMatrix matrix = s_cam.GetModelViewMatrix(); //将模型可视化矩阵赋值给matrix
Matrix m = matrix;
//赋值旋转矩阵
RotationMatrix R;
for (int i = 0; i < 3; i++)
for (int j = 0; j < 3; j++)
R.matrix(i, j) = m(j, i);
rotation_matrix = R;
//赋值平移向量
TranslationVector t;
t.trans = Vector3d(m(0, 3), m(1, 3), m(2, 3));
t.trans = -R.matrix * t.trans;
translation_vector = t;
//赋值欧拉角向量
TranslationVector euler;
euler.trans = R.matrix.eulerAngles(2, 1, 0);
euler_angles = euler;
//赋值四元数
QuaternionDraw quat;
quat.q = Quaterniond(R.matrix);
quaternion = quat;
glColor3f(1.0, 1.0, 1.0);//设置背景颜色为白色
//绘制立方体
pangolin::glDrawColouredCube();
// draw the original axis (绘制坐标系)
glLineWidth(3);
glColor3f(0.8f, 0.f, 0.f); //设置X轴为红色
glBegin(GL_LINES);
glVertex3f(0, 0, 0);
glVertex3f(10, 0, 0);
glColor3f(0.f, 0.8f, 0.f);//设置Y轴为绿色
glVertex3f(0, 0, 0);
glVertex3f(0, 10, 0);
glColor3f(0.2f, 0.2f, 1.f); //设置Z轴颜色
glVertex3f(0, 0, 0);
glVertex3f(0, 0, 10);
glEnd();
pangolin::FinishFrame();//执行后期渲染、事件处理和帧交换,按照前面的设置进行最终的显示
}
}
CmakeLists文件:
cmake_minimum_required( VERSION 2.8 )
project( visualizeGeometry )
set(CMAKE_CXX_FLAGS "-std=c++11")
# 添加Eigen头文件
include_directories( "/usr/include/eigen3" )
# 添加Pangolin依赖
find_package( Pangolin )
include_directories( ${Pangolin_INCLUDE_DIRS} )
add_executable( visualizeGeometry visualizeGeometry.cpp )
target_link_libraries( visualizeGeometry ${Pangolin_LIBRARIES} )执行效果:
课后习题
1. 验证旋转矩阵是正交矩阵。
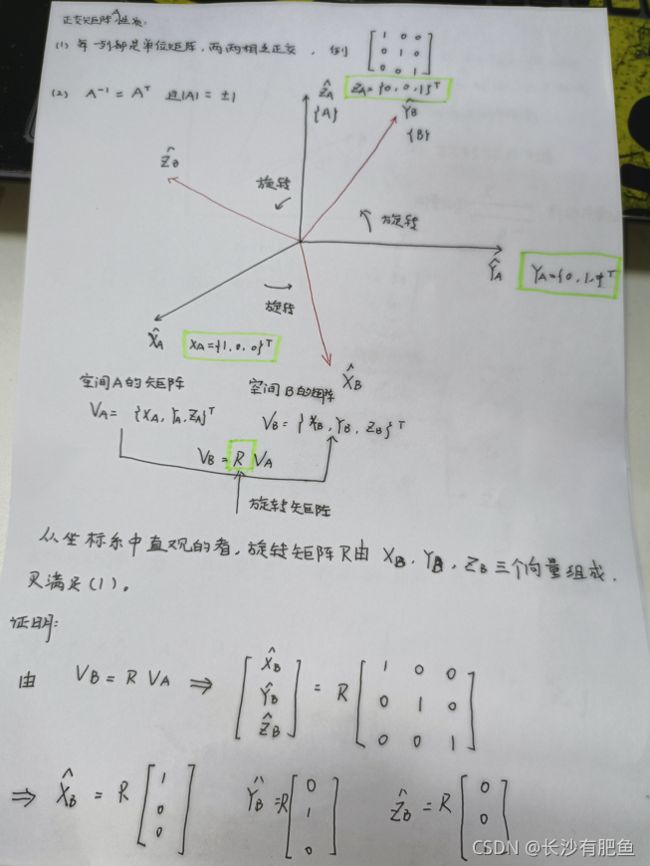
参考链接:
旋转矩阵(Rotate Matrix)的性质分析 - caster99 - 博客园
2. * 寻找罗德里格斯公式的推导过程并理解它。
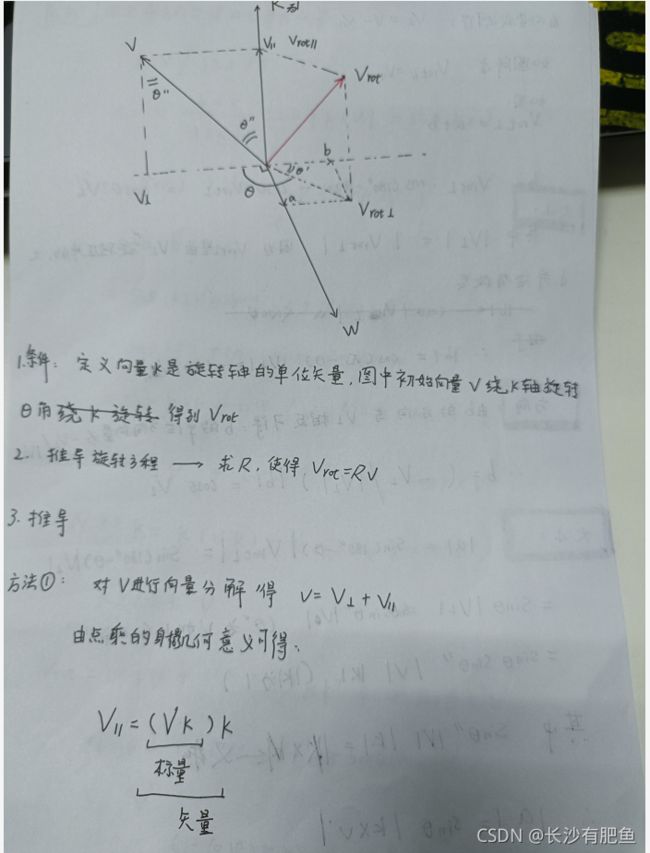


参考链接:
https://blog.csdn.net/qq_41665685/article/details/106139331
3. 验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点(式 3.34)
参考链接: 四元数旋转运算过程_gxsHeeN的博客-CSDN博客_四元数旋转公式
4. 画表总结旋转矩阵、轴角、欧拉角、四元数的转换关系。
这里不画了。。
5. 假设我有一个大的 Eigen 矩阵,我想把它的左上角 3 × 3 的块取出来,然后赋值为I3×3 。请编程实现。
matrix_extraction.cpp
#include
//包含Eigen头文件
#include//Eigen核心模块
#include//Eigen几何模块
#define MATRIX_SIZE 30//定义矩阵的大小
using namespace std;
int main(int argc,char **argv)
{
//设置输出小数点后3位
cout.precision(3);
Eigen::Matrix matrix_NN = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);//生成随机数矩阵
Eigen::Matrixmatrix_3d1 = Eigen::MatrixXd::Random(3,3);//3x3矩阵变量
Eigen::Matrix3d matrix_3d = Eigen::Matrix3d::Random();//两种方式都可以
/*方法1:循环遍历矩阵的三行三列 */
for(int i = 0;i < 3; i ++)
{
for(int j = 0 ;j < 3;j++)
{
matrix_3d(i,j) = matrix_NN(i,j);
cout< cmake_minimum_required(VERSION 2.8)
project(homework)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
# 添加Eigen头文件
include_directories("/usr/include/eigen3")
add_executable(matrix_extraction matrix_extraction.cpp)执行结果:
x_extraction
0.68 0.0259 -0.523
-0.211 0.678 0.941
0.566 0.225 0.804
赋值后的矩阵为:
1 0 0
0 1 0
0 0 1
提取出来的矩阵块为:
0.68 0.0259 -0.523
-0.211 0.678 0.941
0.566 0.225 0.804
赋值后的矩阵为:
1 0 0
0 1 0
0 0 1转载于:灰色的石头 - 博客园
6. * 一般线程方程 Ax = b 有哪几种做法?你能在 Eigen 中实现吗?
axb.cpp
#include
#include
#include
#include
/*线性方程组Ax = b的解法(直接法(1,2,3,4,5)+迭代法(6))其中只有2 3方法不要求方程组个数与变量个数相等*/
//包含Eigen头文件
//#include
#include
#include
#include
//下面这两个宏的数值一样的时候 方法1 4 5 6才能正常工作
#define MATRIX_SIZE 3 //方程组个数
#define MATRIX_SIZE_ 3 //变量个数
//using namespace std;
typedef Eigen::Matrix Mat_A;
typedef Eigen::Matrix Mat_B;
//Jacobi迭代法的一步求和计算
double Jacobi_sum(Mat_A &A,Mat_B &x_k,int i);
//迭代不收敛的话 解向量是0
Mat_B Jacobi(Mat_A &A,Mat_B &b, int &iteration_num, double &accuracy );
int main(int argc,char **argv)
{
//设置输出小数点后3位
std::cout.precision(3);
//设置变量
Eigen::Matrix matrix_NN = Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE_);//随机数矩阵
Eigen::Matrix v_Nd = Eigen::MatrixXd::Random(MATRIX_SIZE,1);//解向量
//测试用例
matrix_NN << 10,3,1,2,-10,3,1,3,10;//测试所用矩阵
v_Nd <<14,-5,14;//解向量
//设置解变量
Eigen::Matrixx;//Ax=b中的b
//时间变量
clock_t tim_stt = clock();
/*1、求逆法 很可能没有解 仅仅针对方阵才能计算*/
#if (MATRIX_SIZE == MATRIX_SIZE_)
x = matrix_NN.inverse() * v_Nd;//x=A(T)*b
std::cout<<"直接法所用时间和解为:"<< 1000*(clock() - tim_stt)/(double)CLOCKS_PER_SEC
<<"MS"<< std::endl << x.transpose() << std::endl;
#else
std::cout<<"直接法不能解!(提示:直接法中方程组的个数必须与变量个数相同,需要设置MATRIX_SIZE == MATRIX_SIZE_)"<es(B);
EV = es.eigenvalues();
// cout<<"迭代矩阵特征值为:"< __complex_abs(EV(index)) )?maxev:(__complex_abs(EV(index)));
}
std::cout<< "Jacobi迭代矩阵的谱半径为:"<< maxev<= 1){
std::cout<<"Jacobi迭代算法不收敛!"< R )
R = temp;
}
//判断进度是否达到精度要求 达到进度要求后 自动退出
if( R < accuracy ){
std::cout <<"Jacobi迭代算法迭代"<< k << "次达到精度要求."<< std::endl;
isFlag = 1;
break;
}
//清零R,交换迭代解
R = 0;
x_k = x_k1;
}
if( !isFlag )
std::cout << std::endl <<"迭代"< cmake_minimum_required(VERSION 2.8)
project(homework1)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
# 添加Eigen头文件
include_directories("/usr/include/eigen3")
add_executable(axb axb.cpp)执行结果:
直接法所用时间和解为:0.022MS
1 1 1
QR分解所用时间和解为:0.005MS
1 1 1
最小二乘法所用时间和解为:0.001MS
1 1 1
LU分解方法所用时间和解为:0.003MS
1 1 1
Cholesky 分解方法所用时间和解为:0.001MS
1.4 -0.0472 0.103
欢迎进入Jacobi迭代算法!
Jacobi迭代矩阵的谱半径为:0.387
Jacobi迭代算法谱半径小于1,该算法收敛
Jacobi迭代法迭代次数和精度:
10 0.01
Jacobi迭代算法迭代6次达到精度要求.
Jacobi 迭代法所用时间和解为:0.035MS
0.998 1 0.998
转载于:视觉slam十四讲课后习题ch3-6 - 灰色的石头 - 博客园