MSP432P401R TI Drivers 库函数学习笔记(六)UART 串口
目录
- API (机翻)
- 上机实战
-
- 配置
- 初始化和实验
-
- 实验结果
- 整体代码
-
- myUart.c
- myUart.h
- myTask.c
- myTask.h
- main.c
- main.h
平台:Code Composer Studio 10.4.0
MSP432P401R SimpleLink™ 微控制器 LaunchPad™ 开发套件
(MSP-EXP432P401R)
API (机翻)
官方UART API 手册
void UART_close (UART_Handle handle)
关闭由UART句柄指定的UART外围设备
int_fast16_t UART_control (UART_Handle handle, uint_fast16_t cmd, void *arg)
在给定的UART_Handle上执行实现特定的特性
void UART_init (void)
初始化UART模块
UART_Handle UART_open (uint_least8_t index, UART_Params *params)
初始化给定的UART外围设备
void UART_Params_init (UART_Params *params)
初始化UART_Params结构体为其默认值
int_fast32_t UART_write (UART_Handle handle, const void *buffer, size_t size)
用于在启用中断的情况下将数据写入UART
int_fast32_t UART_writePolling (UART_Handle handle, const void *buffer, size_t size)
向UART写入数据的函数,它轮询外围设备以等待可以写入新数据。此API的使用与UART_write()
的使用是互斥的
void UART_writeCancel (UART_Handle handle)
取消调用UART_write()
int_fast32_t UART_read (UART_Handle handle, void *buffer, size_t size)
用于从启用中断的UART读取数据
int_fast32_t UART_readPolling (UART_Handle handle, void *buffer, size_t size)
从UART读取数据而不中断。此API必须与UART_read()互斥使用
void UART_readCancel (UART_Handle handle)
取消调用UART_read()
上机实战
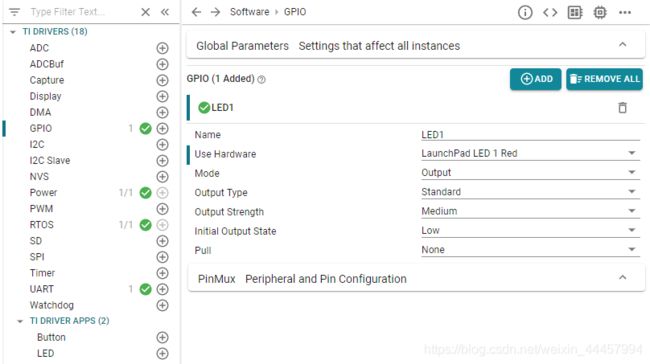
配置

LED1用于提示单片机正常运行
初始化和实验
/*
* ======== mainThread ========
*/
void *mainThread(void *arg0)
{
My_Task_Init(LED_Task, 1, 1024);
My_Uart_Init(&huart1, USB_UART, 115200);
while(1)
{
UART_printf(huart1, "MSP432P401R in 115200\r\n");
usleep(1000);
}
}
实验结果

点击发送

如图收发实验成功
整体代码
myUart.c
/*
* myUart.c
*
* Created on: 2021年8月3日
* Author: Royic
*/
#include "./inc/myUart.h"
#include myUart.h
/*
* myUart.h
*
* Created on: 2021年8月3日
* Author: Royic
*/
#ifndef INC_MYUART_H_
#define INC_MYUART_H_
#include "./inc/main.h"
// Import the UART driver definitions
#include myTask.c
/*
* myTask.c
*
* Created on: 2021年8月2日
* Author: Royic
*/
/* POSIX Header files */
#include myTask.h
/*
* myTask.h
*
* Created on: 2021年8月2日
* Author: Royic
*/
#ifndef INC_MYTASK_H_
#define INC_MYTASK_H_
#include "./inc/main.h"
void *mainThread(void *arg0);
void My_Task_Init(void *(*startroutine)(void *), int priority, size_t stacksize);
void *LED_Task(void *arg0);
#endif /* INC_MYTASK_H_ */
main.c
/*
* ======== main_tirtos.c ========
*/
#include "./inc/main.h"
/* POSIX Header files */
#include main.h
/*
* main.h
*
* Created on: 2021年8月2日
* Author: Royic
*/
#ifndef INC_MAIN_H_
#define INC_MAIN_H_
/* For usleep() */
#include