基于快速径向对称变换的圆环检测
记录平时学习的碎片…
快速径向对称变换在原论文中的主要作用是用来作为图像特征点检测(面部特征、感兴趣区域),其依赖于梯度信息,来检测图像中高度径向对称的点。
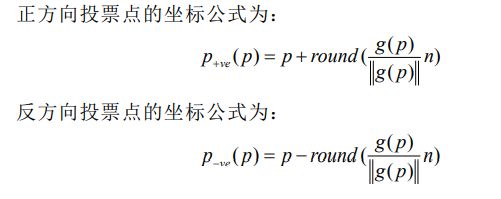
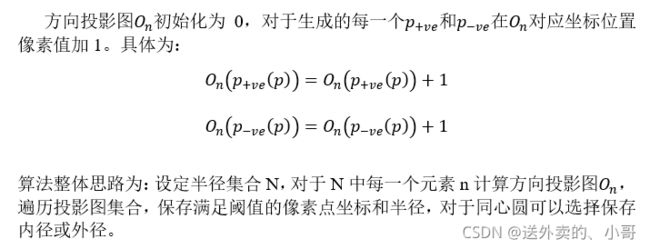
圆是旋转对称的,可以利用此算法来检测圆环的中心点。圆周上的点到圆心的距离相等,且圆周上的点的梯度方向垂直于切线指向圆心。基于以上两点结合径向对称变换算法内容,对圆周上的每一个点进行遍历生成该半径下的投影图像,找到投影图像中像素较大的值,便可确定圆心的位置。

 具体实现代码如下:
具体实现代码如下:
#include "opencv2\core\core.hpp"
#include "opencv2\highgui\highgui.hpp"
#include "opencv2\imgproc\imgproc.hpp"
#include要求输入的参数较多,在实际使用的过程中,个人认为除非是某些特定的场合,不然半径是多变的,很难确定有效的半径集合,在这里投票数阈值还需要手动输入,这也是不好的,后面有时间改成自适应阈值。
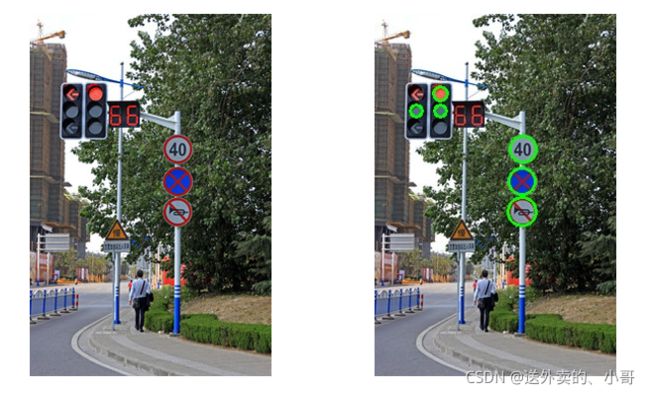
小测试(参数并非通用):
int main()
{
Mat dstImage, SrcImage, ThreImage, grayImage;
string path = "F:\\Image_design\\src2.jpg";
SrcImage = imread(path); //source image
if (!SrcImage.data) {
std::cout << "Could not open or find the image" << std::endl;
return -1;
}
std::vector<cv::Vec3i> Centerpoints;
int VotingThre = 18;
cvtColor(SrcImage, grayImage, COLOR_BGR2GRAY);
Centerpoints = frstCircle(grayImage, VotingThre, FRST_MODE_BOTH, 5, 15);
for (int i = 0; i < Centerpoints.size(); ++i)
{
cv::circle(SrcImage, cv::Point(Centerpoints[i].val[0], Centerpoints[i].val[1]),
Centerpoints[i].val[2], Scalar(0, 255, 0), 2);
}
imshow("Origin", SrcImage); //效果图
waitKey(0);
return 0;
}
参考代码:frst