人脸检测之MTCNN(一)——python中使用tensorflow运行模型
一、背景
MTCNN是一种经典的人脸检测方法,通过三个阶段的深度卷积网络级联,实现“由粗到精”的检测过程,最终能够输出一幅图像中的人脸框坐标与每个人脸的5个特征点坐标。网络上有关该论文与方法的解读有很多,在最后的参考中我会放上自己觉得不错的几篇链接。这篇文章主要给出Python中调用训练好的MTCNN模型做正向推理的过程,其中大部分参考自https://blog.csdn.net/BEYONDldh/article/details/105221244,感谢这位博主的无私分享。我会给出所有阶段的实现代码,并在必要部分结合论文做注释说明。
二、实现
1、运行环境搭建
我使用的是基于win10的64bit系统,安装Python,和tf2、opencv。
2、模型的建立

上图是MTCNN论文中的模型部分介绍,总共三个模型,其中基本由卷积层、池化层、全连接层组成,网络结构比较简单。 链接中提供了训练好的三个网络权重,这里我们只需要建立模型后加载权重信息。相关代码如下
# 构造PNET
def create_pnet():
"""训练时输入图像大小为12x12x3,测试时输入图像宽高不小于12"""
input = tf.keras.Input(shape=[None, None, 3])
x = tf.keras.layers.Conv2D(10, (3,3), strides = (1,1), padding='valid', name='conv1')(input)
x = tf.keras.layers.PReLU(shared_axes=[1,2], name='PReLU1')(x)
x = tf.keras.layers.MaxPooling2D()(x)
x = tf.keras.layers.Conv2D(16, (3, 3), strides=1,padding='valid',name='conv2')(x)
x = tf.keras.layers.PReLU(shared_axes=[1, 2],name='PReLU2')(x)
x = tf.keras.layers.Conv2D(32, (3, 3),strides=1, padding='valid', name='conv3')(x)
x = tf.keras.layers.PReLU(shared_axes=[1, 2],name='PReLU3')(x)
classifier = tf.keras.layers.Conv2D(2,(1,1), activation='softmax', name='conv4-1')(x)
bbox_regress = tf.keras.layers.Conv2D(4,(1,1), name='conv4-2')(x)
model = tf.keras.models.Model([input], [classifier, bbox_regress])
return model
# 构造RNET
def create_rnet():
"""定义RNet网络的架构"""
input = tf.keras.Input(shape=[24, 24, 3])
x = tf.keras.layers.Conv2D(28, (3, 3), strides=1, padding='valid', name='conv1')(input)
x = tf.keras.layers.PReLU(shared_axes=[1, 2], name='prelu1')(x)
x = tf.keras.layers.MaxPooling2D(pool_size=3, strides=2, padding='same')(x)
x = tf.keras.layers.Conv2D(48, (3, 3), strides=1, padding='valid', name='conv2')(x)
x = tf.keras.layers.PReLU(shared_axes=[1, 2], name='prelu2')(x)
x = tf.keras.layers.MaxPooling2D(pool_size=3, strides=2)(x)
x = tf.keras.layers.Conv2D(64, (2, 2), strides=1, padding='valid', name='conv3')(x)
x = tf.keras.layers.PReLU(shared_axes=[1, 2], name='prelu3')(x)
x = tf.keras.layers.Permute((3, 2, 1))(x)
x = tf.keras.layers.Flatten()(x)
x = tf.keras.layers.Dense(128, name='conv4')(x)
x = tf.keras.layers.PReLU(name='prelu4')(x)
classifier = tf.keras.layers.Dense(2, activation='softmax', name='conv5-1')(x)
bbox_regress = tf.keras.layers.Dense(4, name='conv5-2')(x)
model = tf.keras.models.Model([input], [classifier, bbox_regress])
return model
# 构造ONET
def create_onet():
"""定义ONet网络的架构"""
input = tf.keras.layers.Input(shape = [48,48,3])
# 48,48,3 -> 23,23,32
x = tf.keras.layers.Conv2D(32, (3, 3),
strides=1,
padding='valid',
name='conv1')(input)
x = tf.keras.layers.PReLU(shared_axes=[1,2],
name='prelu1')(x)
x = tf.keras.layers.MaxPool2D(pool_size=3,
strides=2,
padding='same')(x)
# 23,23,32 -> 10,10,64
x = tf.keras.layers.Conv2D(64, (3, 3),
strides=1,
padding='valid',
name='conv2')(x)
x = tf.keras.layers.PReLU(shared_axes=[1,2],
name='prelu2')(x)
x = tf.keras.layers.MaxPool2D(pool_size=3,
strides=2)(x)
# 8,8,64 -> 4,4,64
x = tf.keras.layers.Conv2D(64, (3, 3),
strides=1,
padding='valid',
name='conv3')(x)
x = tf.keras.layers.PReLU(shared_axes=[1,2],
name='prelu3')(x)
x = tf.keras.layers.MaxPool2D(pool_size=2)(x)
# 4,4,64 -> 3,3,128
x = tf.keras.layers.Conv2D(128, (2, 2),
strides=1,
padding='valid',
name='conv4')(x)
x = tf.keras.layers.PReLU(shared_axes=[1,2],
name='prelu4')(x)
# 3,3,128 -> 128,12,12
x = tf.keras.layers.Permute((3,2,1))(x)
# 1152 -> 256
x = tf.keras.layers.Flatten()(x)
x = tf.keras.layers.Dense(256, name='conv5') (x)
x = tf.keras.layers.PReLU(name='prelu5')(x)
# 鉴别
# 256 -> 2 256 -> 4 256 -> 10
classifier = tf.keras.layers.Dense(2,
activation='softmax',
name='conv6-1')(x)
bbox_regress = tf.keras.layers.Dense(4,name='conv6-2')(x)
landmark_regress = tf.keras.layers.Dense(10,name='conv6-3')(x)
model = tf.keras.models.Model([input], [classifier, bbox_regress, landmark_regress])
return model
3、PNET推理
PNET的推理流程简单描述如下:
1)输入图像下采样生成金字塔,论文中给出的下采样缩放系数为0.709;这样可以兼顾原始输入图像中的大小人脸
2)为了提高效率,可将每层金字塔图像扩展为与底层金字塔相同尺寸,然后将图像数据归一化,整体作为一个batch送入PNET
3)对PNET在不同尺度图像上获取的一系列备选人联框,根据人脸得分过滤小于阈值的部分,之后过滤不合理的部分(譬如宽/高小于0,尺寸过小等等)
4)对3)中剩余的人脸框,使用NMS再次过滤,最终得到的结果即为PNET阶段的最终输出。
相关代码如下
# nms过滤,无法过滤内部包含且占比低于阈值的情况
def nms(rectangles, threshold):
if(len(rectangles) == 0):
return rectangles
bbx = np.array(rectangles)
x1 = bbx[:, 0]
y1 = bbx[:, 1]
x2 = bbx[:, 2]
y2 = bbx[:, 3]
score = bbx[:, 4]
area = np.multiply(x2-x1+1, y2-y1+1)
index = np.array(score.argsort())
pick=[]
while len(index) > 0:
xx1 = np.maximum(x1[index[-1]], x1[index[0:-1]])
yy1 = np.maximum(y1[index[-1]], y1[index[0:-1]])
xx2 = np.minimum(x2[index[-1]], x2[index[0:-1]])
yy2 = np.minimum(y2[index[-1]], y2[index[0:-1]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
inter_scale = inter / (area[index[-1]] + area[index[0:-1]] - inter)
pick.append(index[-1])
index = index[np.where(inter_scale < threshold)]
ret = bbx[pick].tolist()
return ret
print("TF version: {}".format(tf.__version__))
# 读取输入图像,并转为RGB格式
image = cv2.imread("2.jpg")
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
image_size = min(image.shape[0], image.shape[1])
min_face_size = image_size * 0.05
print(image.shape)
print(type(image))
# 计算缩放图像所需尺度因子,使得最顶层图像尺寸不小于12
scales = []
factor = 0.709
for i in range(0, 10):
if((factor**i) * image_size > 12):
scales.append(factor**i)
print(scales)
# 构造金字塔,后面会把输入图像金字塔组成batch输入到PNET,实际上会把每一层金字塔扩展为底层大小
pyramid_imgs = []
for scale in scales:
new_row = int(image.shape[0] * scale)
new_col = int(image.shape[1] * scale)
img_scaled = cv2.resize(image, (new_col, new_row))
img_ = np.zeros([image.shape[0], image.shape[1], image.shape[2]], dtype=np.uint8)
img_[0:new_row, 0: new_col] = img_scaled
#cv2.imshow("img_", img_)
#cv2.waitKey()
pyramid_imgs.append(img_)
# 构造PNET的输入图像,归一化处理
pnet_input_imgs = []
for img in pyramid_imgs:
img_ = (img - 127.5)/127.5
pnet_input_imgs.append(img_)
# 将图像列表转为ndarray
pnet_input_array = np.array(pnet_input_imgs)
# 构造PNET网络
pnet = create_pnet()
pnet.load_weights("./pnet.h5", by_name=True)
# 推理输出
pnet_output = pnet.predict(pnet_input_array)
print(len(pnet_output))
print(pnet_output[0].shape)
print(pnet_output[1].shape)
# 处理矩形框
pnet_threshold = 0.7
pnet_bbx = []
for i in range(len(scales)):
cls_prob = pnet_output[0][i, :, :, 1]
row, col = np.where(cls_prob > pnet_threshold)
if row.shape[0] == 0:
continue
start_pt = np.array((col, row)).T
left_top = np.fix((start_pt*2) / scales[i])# n*2
right_down = np.fix(((start_pt * 2) + 11) / scales[i])# n*2
bbx = np.concatenate((left_top, right_down), axis = 1)# n*4
scores = np.array(pnet_output[0][i,row, col, 1])
scores.resize(len(row), 1)# n*1
offsets = pnet_output[1][i, row, col] * 12 /scales[i]
bbx = bbx + offsets
bbx = np.concatenate((bbx, scores), axis = 1)
for b in bbx:
# 不合理的矩形框舍弃,这里只处理矩形框宽高为负数的情况
if((b[2] < b[0])
or (b[3] < b[1])):
continue
# 矩形框扩展为正方形
w = b[2] - b[0]
h = b[3] - b[1]
l = max(w, h)
b[0] = b[0] - (l - w) * 0.5
b[2] = b[2] + (l - w) * 0.5
b[1] = b[1] - (l - h) * 0.5
b[3] = b[3] + (l - h) * 0.5
# 修改矩形框的分布,使其位于图像内部
b[0] = max(0, b[0])
b[1] = max(0, b[1])
b[2] = min(image.shape[1], b[2])
b[3] = min(image.shape[0], b[3])
# 过小的人脸舍弃掉
if((b[2] - b[0] < min_face_size)
or (b[3] - b[1] < min_face_size)):
continue
pnet_bbx.append(b)
print(np.array(pnet_bbx).shape)
if(len(pnet_bbx) == 0):
print("no face detected")
sys.exit()
# nms过滤
pnet_bbx_nms = nms(pnet_bbx, 0.7)
4、RNET推理
上述步骤获取的人脸框,在原图上进行裁剪,宽高缩放为24X24,归一化处理后送入到RNET中推理;再将推理得到的人脸框进行过滤(规则过滤、NMS操作等),得到最终输出的人脸框。
## 之后进入RNET阶段
# 构造rnet
rnet = create_rnet()
rnet.load_weights("./rnet.h5", by_name=True)
# 构造rnet输入,尺寸缩放为24X24,归一化
rnet_input_imgs = []
for bbx in pnet_bbx_nms:
img = image[int(bbx[1]):int(bbx[3]), int(bbx[0]):int(bbx[2])]
img = cv2.resize(img, (24, 24))
img_ = (img - 127.5) /127.5
rnet_input_imgs.append(img_)
rnet_input_array = np.array(rnet_input_imgs)
# 推理输出
rnet_output = rnet.predict(rnet_input_array)
print(len(rnet_output))
print(len(pnet_bbx_nms))
print(rnet_output[0].shape)
print(rnet_output[1].shape)
# 整理输出矩形框
rnet_bbx = []
rnet_score_threshold = 0.7
for i in range(len(pnet_bbx_nms)):
rnet_score = rnet_output[0][i, 1]
offset = rnet_output[1][i]
if(rnet_score < rnet_score_threshold):
continue
w = pnet_bbx_nms[i][2] - pnet_bbx_nms[i][0]
h = pnet_bbx_nms[i][3] - pnet_bbx_nms[i][1]
scales = np.array([w / 24, h / 24, w / 24, h /24])
bbx = pnet_bbx_nms[i]
bbx[0:4] = bbx[0:4] + offset * 24 * scales
bbx[4] = rnet_score
# 不合理的矩形框舍弃,这里只处理矩形框宽高为负数的情况
if((bbx[2] < bbx[0])
or (bbx[3] < bbx[1])):
continue
# 矩形框扩展为正方形
w = bbx[2] - bbx[0]
h = bbx[3] - bbx[1]
l = max(w, h)
bbx[0] = bbx[0] - (l - w) * 0.5
bbx[2] = bbx[2] + (l - w) * 0.5
bbx[1] = bbx[1] - (l - h) * 0.5
bbx[3] = bbx[3] + (l - h) * 0.5
# 修改矩形框的分布,使其位于图像内部
bbx[0] = max(0, bbx[0])
bbx[1] = max(0, bbx[1])
bbx[2] = min(image.shape[1], bbx[2])
bbx[3] = min(image.shape[0], bbx[3])
# 过小的人脸舍弃掉
if((bbx[2] - bbx[0] < min_face_size)
or (bbx[3] - bbx[1] < min_face_size)):
continue
rnet_bbx.append(bbx)
# nms过滤
rnet_bbx_nms = nms(rnet_bbx, 0.7)
5、ONET推理
上述步骤获取的人脸框,在原图上进行裁剪,宽高缩放为48x48,归一化处理后送入到O]NET中推理;再将推理得到的人脸框进行过滤(规则过滤、NMS操作等),得到最终输出的人脸框,与5个特征点信息,此时完成了整个网络的推理。
## ONET阶段
# 构造onet
onet = create_onet()
onet.load_weights("./onet.h5", by_name=True)
# 构造onet输入,尺寸缩放为48X48,归一化
onet_input_imgs = []
for bbx in rnet_bbx_nms:
img = image[int(bbx[1]):int(bbx[3]), int(bbx[0]):int(bbx[2])]
img = cv2.resize(img, (48, 48))
img_ = (img - 127.5) /127.5
onet_input_imgs.append(img_)
onet_input_array = np.array(onet_input_imgs)
# 推理输出
onet_output = onet.predict(onet_input_array)
# 整理输出矩形框
onet_bbx = []
onet_score_threshold = 0.8
for i in range(len(rnet_bbx_nms)):
onet_score = onet_output[0][i, 1]
offset = onet_output[1][i]
if(onet_score < onet_score_threshold):
continue
w = rnet_bbx_nms[i][2] - rnet_bbx_nms[i][0]
h = rnet_bbx_nms[i][3] - rnet_bbx_nms[i][1]
scales = np.array([w / 48, h / 48, w / 48, h /48])
bbx = rnet_bbx_nms[i]
bbx[0:4] = bbx[0:4] + offset * 24 * scales
bbx[4] = onet_score
# 不合理的矩形框舍弃,这里只处理矩形框宽高为负数的情况
if((bbx[2] < bbx[0])
or (bbx[3] < bbx[1])):
continue
# 矩形框扩展为正方形
w = bbx[2] - bbx[0]
h = bbx[3] - bbx[1]
l = max(w, h)
bbx[0] = bbx[0] - (l - w) * 0.5
bbx[2] = bbx[2] + (l - w) * 0.5
bbx[1] = bbx[1] - (l - h) * 0.5
bbx[3] = bbx[3] + (l - h) * 0.5
# 修改矩形框的分布,使其位于图像内部
bbx[0] = max(0, bbx[0])
bbx[1] = max(0, bbx[1])
bbx[2] = min(image.shape[1], bbx[2])
bbx[3] = min(image.shape[0], bbx[3])
# 过小的人脸舍弃掉
if((bbx[2] - bbx[0] < min_face_size)
or (bbx[3] - bbx[1] < min_face_size)):
continue
onet_bbx.append(bbx)
# nms过滤
onet_bbx_nms = nms(onet_bbx, 0.7)
三、测试
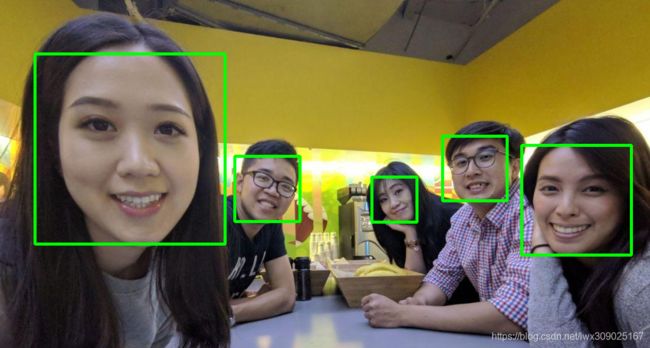
在网上找一张合影图像测试,输出结果如下,这里没有绘制关键点坐标,只画出人脸框。
四、参考
https://zhuanlan.zhihu.com/p/113184231
https://zhuanlan.zhihu.com/p/58825924
https://blog.csdn.net/BEYONDldh/article/details/105221244