最近几天陆续补充了一些“线性回归”部分内容,这节继续机器学习基础部分,这节主要对CNN的基础进行整理,仅限于基础原理的了解,更复杂的内容和实践放在以后再进行总结。
卷积神经网络的基本原理
前面对全连接神经网络和深度学习进行了简要的介绍,这一节主要对卷积神经网络的基本原理进行学习和总结。
所谓卷积,就是通过一种数学变换的方式来对特征进行提取,通常用于图片识别中。
既然全连接的神经网络可以用于图片识别,那么为什么还要用卷积神经网络呢?
0.使用卷积神经网络的理由
(1)首先来看下面一张图片:
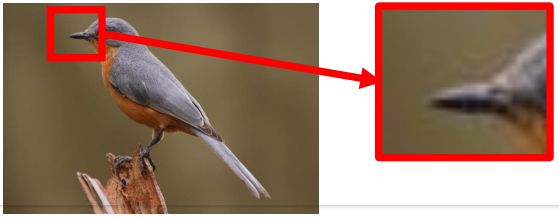
在这个图片当中,鸟嘴是一个很明显的特征,当我们做图像识别时,当识别到有“鸟嘴”这样的特征时,可以具有很高的确定性认为图片是一个鸟类。
那么,在提取特征的过程中,有时就没有必要去看完整张图片,只需要一小部分就能识别出一定具有代表的特征。
因此,使用卷积就可以使某一个特定的神经元(在这里,这个神经元可能就是用来识别“鸟嘴”的)仅仅处理带有该特征的部分图片就可以了,而不必去看整张图片。

那么这样就会使得这个神经元具有更少的参数(因为不用再跟图片的每一维输入都连接起来)。
(2)再来看下面一组图片:
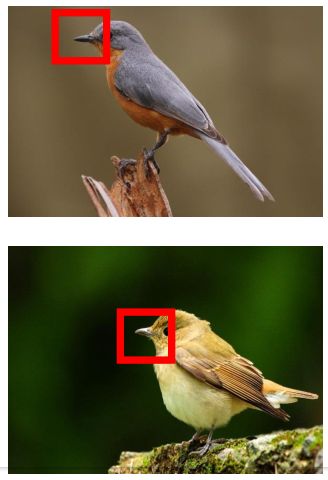
上面两张图片都是鸟类,而不同的是,两只鸟的“鸟嘴”的位置不同,但在普通的神经网络中,需要有两个神经元,一个去识别左上角的“鸟嘴”,另一个去识别中间的“鸟嘴”:
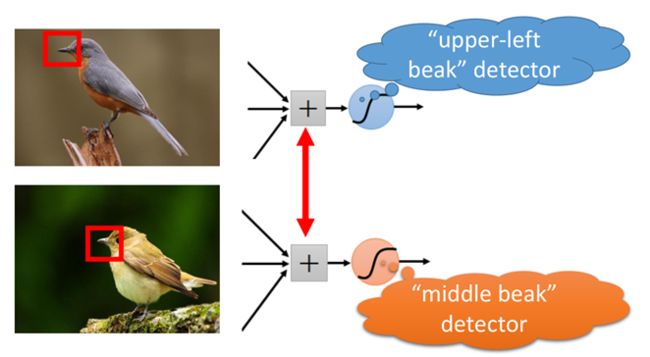
但其实这两个“鸟嘴”的形状是一样的,这样相当于上面两个神经元是在做同一件事情。
而在卷积神经网络中,这两个神经元可以共用一套参数,用来做同一件事情。
(3)对样本进行子采样,往往不会影响图片的识别。
如下面一张图:

假设把一张图片当做一个矩阵的话,取矩阵的奇数行和奇数列,可看做是对图片的一种缩放,而这种缩放往往不会影响识别效果。
卷积神经网络中就可以对图片进行缩放,是图片变小,从而减少模型的参数。
1.卷积神经网络的基本结构
卷积神经网络的基本结构如图所示:

从右到左,输入一张图片→卷积层→max pooling(池化层)→卷积层→max pooling(池化层)→......→展开→全连接神经网络→输出。
中间的卷积层和池化层可以重复多次。后面会一一介绍每一层是如何工作的。
对于第0部分的三个功能:
(1)某个神经元只需侦测某一部分的图片,来识别某种特征这个工作是在卷积层内完成的。
(2)具有相同功能的神经元共用一套参数,这个工作也是在卷积层内完成的。
(3)通过缩小图片,来减少模型的参数,这个工作是在池化层中完成的。
稍后会解释上面三个部分是如何进行的。
1.1.卷积层的工作原理
假设有一张6*6的黑白图片,如图所示:

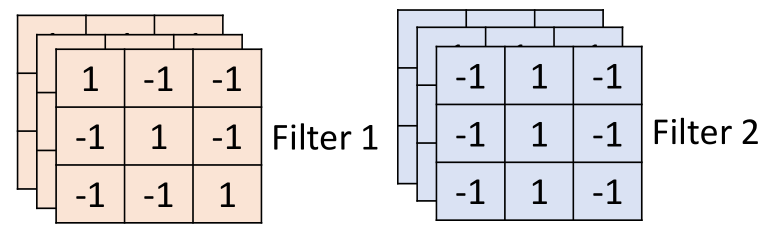
首先图片经过卷积层,卷积层有一组filter,每个filter用来抓取图片中的某一种特征,如图所示:
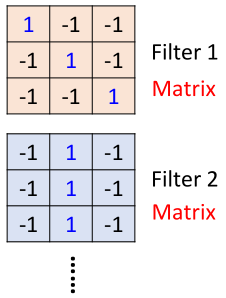
假设filter是3*3的矩阵,每个filter有9个参数,而这些参数就是通过训练学习得到的,这里假设我们已经学习得到了上面一组参数的值。
因此也就说明了问题(1)中,每一个filter只侦测图片中的很小一部分数据。
那么每个filter是如何去抓取特征的呢?也就是(1)中使某一个神经元只侦测一部分图片就能提取某一种特征的问题。
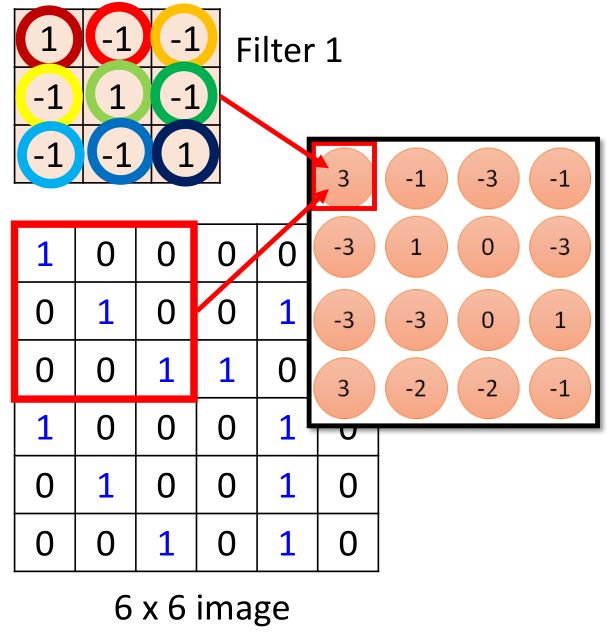
首先看filter1,filter大小为3*3,那么相当于这个filter1依次从左到右去覆盖整张图片,然后与覆盖区域做内积,如图所示:

首先从左上角开始,覆盖图片左上角3*3的区域,计算结果得到3,然后向右移动,这里移动的步长称之为stride,当stride为1时,即一次移动一格,为2时,一次移动两格,如图所示:
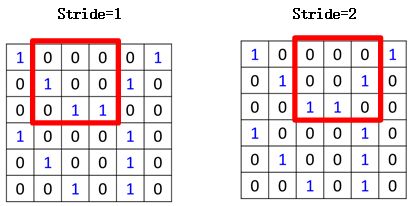
移动之后再次用图片被覆盖的区域与filter做内积,得到第二个值:

依次进行移动和计算,当移到最右边尽头时,则从下一行开始继续移动,最终得到如图所示矩阵:

通过观察这个filter1可以看出,filter1的对角矩阵全为1,其他为-1,那么对于图片中对角为1的部分,与filter1做内积后的值就会很大(例子中等于3),其他的则会很小。
因此filter1是一种用于侦测对角都为1的图片这种属性,在图片中可以看到,坐上角和右下角都具有这种特征。
所以这也就说明了(2)中的问题,一个filter的一组参数,可以侦测到图片中两个位置的相同属性。
接下来是第二个filter,filter2,那么filter2与图片的计算方式一模一样,如图所示:
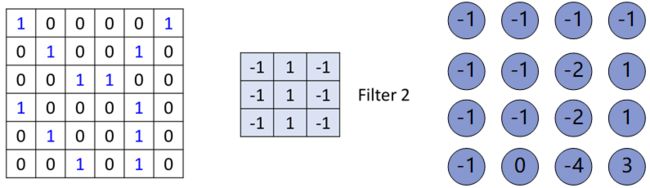
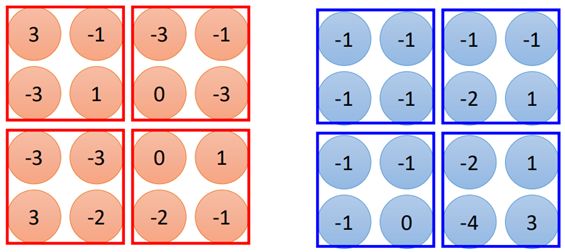
其他的filter也是如此,依次计算,然后把每个filter处理结果放在一起,如图所示:
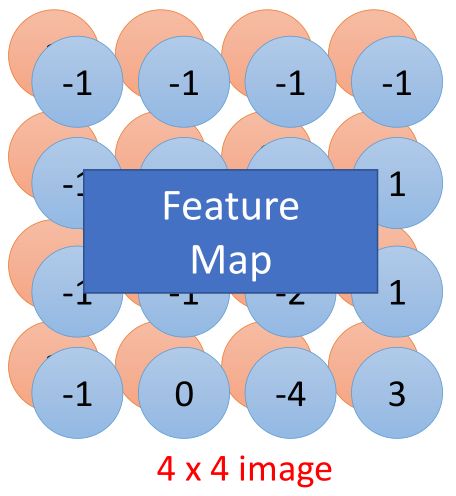
那么相当于一个红色方框现在是由2个值来描述的,最终得到的是2个4*4的图片,称之为“feature map”。
上面是对于一张黑白的图片进行一次卷积(convolution)的过程,那么对于彩色的图片是怎样处理的呢?
彩色图片通常是由“RGB”组成,分别表示红色、绿色和蓝色,那么就相当于有三个部分的组成,如图所示:
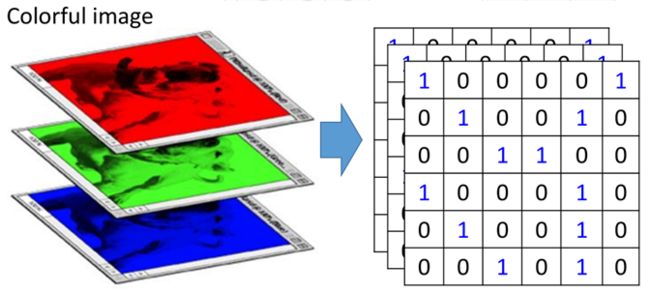 这三个层称之为“通道”(channel),那么利用卷积处理这种图片时,filter也应该是三层,即3*3*3的,是带有深度的,长下面这个样子:
这三个层称之为“通道”(channel),那么利用卷积处理这种图片时,filter也应该是三层,即3*3*3的,是带有深度的,长下面这个样子:
相当于每个filter具有27个参数。
卷积与全连接网络的关系
其实卷积就是一种特殊形式的全连接网络,还是假设是上面那张6*6的图片,如下是全连接的网络结构:
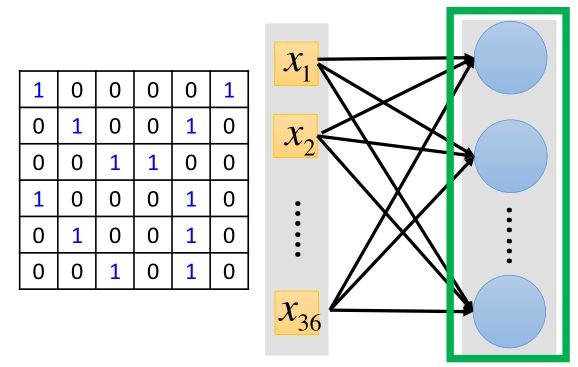
把图片进行拉直展开,但在卷积中,这个网络有些连接的地方被切断了,只有一部分输入与神经元相连接。下面进行解释:
正如上面的卷积过程,如下是其中的一步,如图所示:
那么这个步骤我们可以想象成是这样子的:

左边把图片的36个数值拉直,然后,对于filter1所覆盖的区域为左上角,那么元素对应的位置为1、2、3、7、8、9、13、14、15。
然后这9个数值,依次经过各自的weight相乘再相加,得到第一个值3,这里的weight就是对应的filter中各个位置的值,图中weight线的颜色与filter中圆圈颜色一一对应。
到这里就很清楚的看出卷积与全连接之间的关系,相当于简化了全连接神经网络,从而使得参数量更少。
然后filter开始向右移动一格(stride=1,上面计算过程的第二个方框,元素依次为2、3、4、8、9、10、14、15、16),与filter做inner product,得到结果-1,对应到全连接网络中如图所示:

依旧是每个元素的weight与输入输出连接,颜色对应的filter圆圈与weight的颜色一致。
从上面的图可以看出,两个神经元(3和-1)都是通过filter1作为weight与输入进行连接的,也就是说,这两个神经元是共用同一组参数,这样,在上面减少参数的基础上,使得模型的参数更少了。
上述过程就是卷积层的工作过程,主要用于图片中特征的抓取,完成第0节内容的前两个。
1.2池化层的工作原理
池化层的作用上面说了,就是为了图片的缩放,那么池化层是如何进行缩放的呢?
其实池化层的原理很简单,这里以max-pooling为例,经过卷积层之后的图片变为4*4大小的图片,有2个filter,也就是两张4*4的图片:

池化就是将上面得到的数据进行分组,如图所示:
如图示中的分组方法,这种分组方法可以是任意的,也可以三个一组等等,然后取每个组中的最大值:
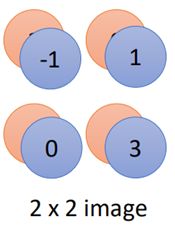
那么原来4*4的图片经过maxpooling之后就缩小为2*2的图片了,当然这里也不一定非要取最大值,也可以取平均,或者又取平均又取最大值等。
那么上面的过程总结一下就可以用如下图进行概括:
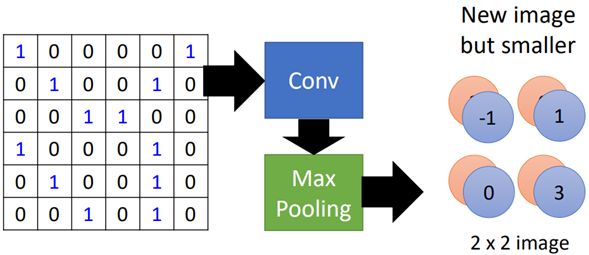
这就是池化层的工作原理,比较简单。
1.3Flatten和全连接层
接下来就来到了flatten和全连接层了,flatten的作用就是把上面得到的两个2*2的image拉直展开,然后再丢进全连接网络中计算就可以了,这个跟前面全连接神经网络的方法一样,如图所示:
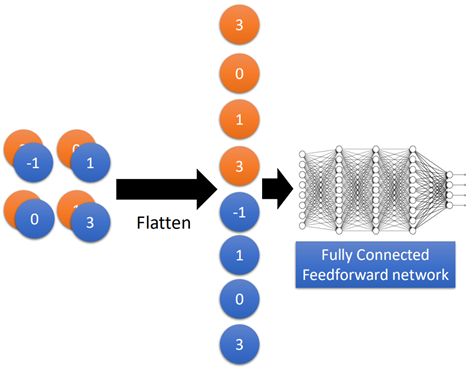
这里就不再详细赘述了。那么整个网络就是利用梯度下降的方法进行训练的,所有的参数被一起学习得到。
2.使用Keras对CNN的简单实现
这里还是使用keras对CNN的建模过程进行一个简单的实现,首先先来看一下keras分别添加卷积层和池化层的过程:
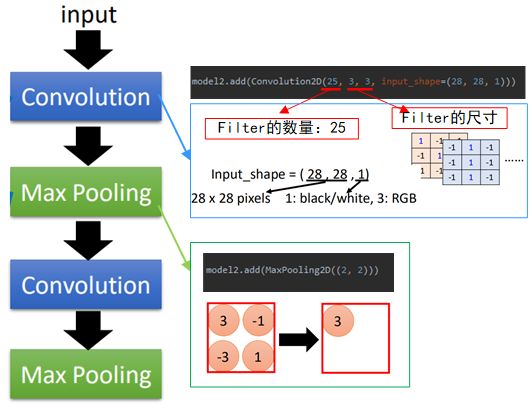
如图中所示,首先要导入Convolution2D(后来这个接口会改成Conv2D)和Maxpooling2D。
然后与之前神经网络中一样,不过是把“Dense”换成了上面两个方法,其中Convolution2D中,25表示filter的数量,3,3表示filter的尺寸,input_shape为输入图片的大小,28*28为图片大小,1表示黑白图片,3则表示彩图“RGB”;
Maxpooling2D中只有分组的形状,即2*2大小的。
接下来就是根据设计的网络的形状,重复上面两个步骤,完成卷积和池化。如图所示:
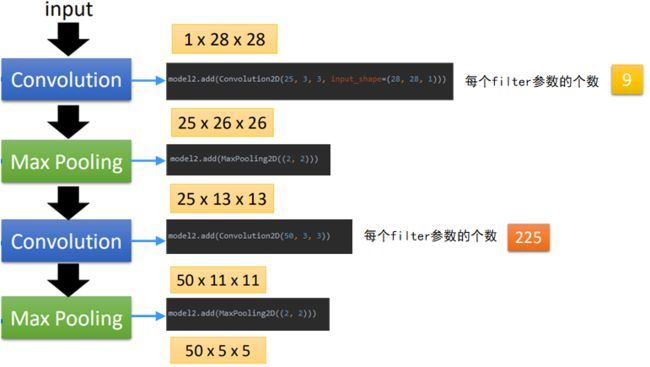
图中黑色的方框为代码的实现内容,在keras1.0和2.0中可能有些差异;
黄色的框中是输入和输出的尺寸大小,可以看到,输入为28*28的图片,经过25个3*3的filter组成的第一个卷积层之后,变成了25*26*26的尺寸;
然后经过第一个2*2的池化层,缩小后的输出尺寸大小为25*13*13;
然后经过第二个由50个3*3的filter之后,输出变为50*11*11;
之后经过第二个2*2的池化层后,缩小后的输出尺寸变为50*5*5(这里由于输入为基数,最后一格就忽略掉了)。
而在卷积层中,filter的参数数量是在变化的,在第一个卷积层的参数为3*3=9个,这个比较好理解;
而在第二个卷积层中,参数就变成了225个,这是因为上一层的输出为25*13*13大小的图片,这时是带有channel的(就相当于一开始输入为RGB时,通道数为3)当使用3*3的filter进行处理时,需要带有深度25,因此每个filter的参数数量为25*3*3=225。
然后就是经过Faltten和fully-connection了,这个与之前的神经网络一致:

然后就可以对模型进行训练了。这里要注意的是,这里的输入跟全连接有所不同,要把输入图片数据转化为(28,28,1)的格式。完整代码如下:
from sklearn.datasets import fetch_openml from sklearn.preprocessing import OneHotEncoder from sklearn.model_selection import train_test_split import numpy as np from keras import Sequential from keras.layers import Dense from keras.layers import Activation from keras.layers import Convolution2D, MaxPooling2D, Flatten data_x, data_y = fetch_openml('mnist_784', version=1, return_X_y=True) x = [] for i in range(len(data_x)): tmp = data_x.iloc[i, :].tolist() tmp = np.array(tmp).reshape((28, 28, 1)) x.append(tmp) x = np.array(x) one_hot = OneHotEncoder() data_y = one_hot.fit_transform(np.array(data_y).reshape(data_y.shape[0], 1)).toarray() train_x, test_x, train_y, test_y = train_test_split(x, data_y) model2 = Sequential() model2.add(Convolution2D(25, 3, 3, input_shape=(28, 28, 1))) model2.add(MaxPooling2D((2, 2))) model2.add(Convolution2D(50, 3, 3)) model2.add(MaxPooling2D((2, 2))) model2.add(Flatten()) model2.add(Dense(units=100)) model2.add(Activation('relu')) model2.add(Dense(units=10)) model2.add(Activation('softmax')) model2.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy']) model2.fit(train_x, train_y, batch_size=300, epochs=20)
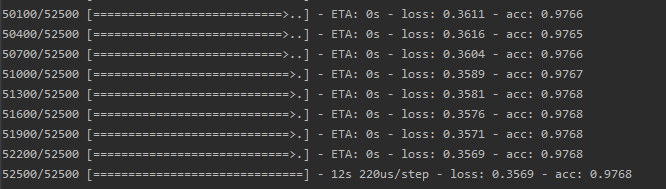
最后的输出如下:
3.CNN都学到了啥?
通过CNN的原理我们大致知道,CNN的卷积是不断提取特征的过程,池化是对图片的缩放,那么究竟CNN学习到了什么呢?如下面一张图:

给机器一张图片,那么对人来说,这张图片是一双鞋,而对机器来说,它可能认为是是美洲狮,因为图中的鞋标有一只美洲狮。
因此,我们想要知道CNN究竟学习到了啥,下面介绍几种方法来查看CNN都在侦测什么特征的方法。
3.1 直接查看filter
前面我们说到,filter就是为了抓取某一种特征的,那么我们是不是可以看一下这些filter分别都是侦测什么样的特征的。
根据CNN的原理,随着网络越来越靠近输出层,那么这一层所学习到的东西就越来越抽象,不太容易观察。因此,我们选取第一个卷积层的filters来看一下。
对于一个训练好的模型,将第一个卷积层的filters单独拿出来,并画出来,如图所示:
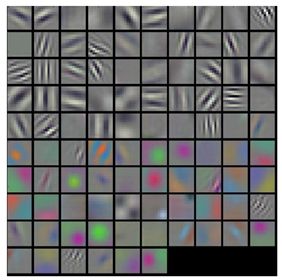
上面一共96个filter,每个filter的大小为11*11,从filter我们可以看出,上面几排的filter主要是侦测形状特征的,下面几排的filter主要是侦测色彩特征的。
我们也可以通过单独看一个filter,然后把图片依次输入的CNN中,看哪些图片经过这个filter后的输出(Activate)最大,如下图所示:

白色的框表示filter,这里白色的框看着很大,主要是因为这个filter比较靠后,也就是它所看到的是前面经过缩小后的输入,因此框就会变得很大。
第一排的图片中的框是一个filter1,可以看到,这个filter对于脸部的侦测比较强;
第二排的框是另一个filter2,可以看到filter2侦测的主要是洞状排列的特征;
第三排的filter3则是侦测红色的特征;
以此类推...
3.2 特征的可视化
这种方法是查看特征的,也就是说使用反卷积、反池化的方法,来可视化输入图像的激活特征。
还用原理部分那个CNN结构的例子,如下图左边的结构:
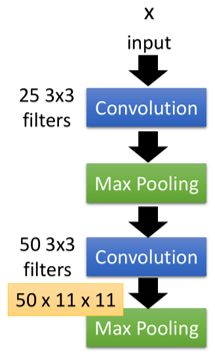
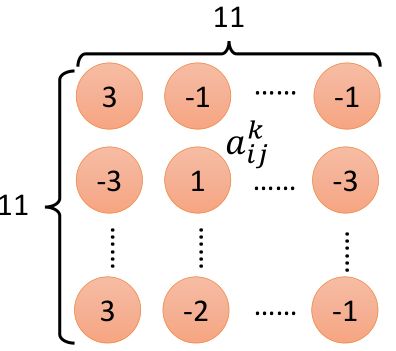
在第二个卷积层中,假设第k个filter,它与输入作用以后得到的结果如上图中右侧,每一个元素aij,然后把aij相加,即为ak,即:
那么现在我们想要通过输入x使得ak最大,也就是找一张图片x,使得ak的输出最大,即:

这里就要利用gradient ascent的方法去找这个最大值了,即求:

就相当于原先经过卷积、池化过程,现在要将x当做未知量,反过来求反池化、反卷积去求解出一个使得ak最大的x(注意这里x并不是真正的图片了,相当于是通过反池化和反卷积所得到的的带有一些特征的图像);
具体原因就在于反池化和反卷积的求解过程,无法还原为原先的图片,这里暂不过多介绍如何反池化和反卷积的原理,后续再补充。
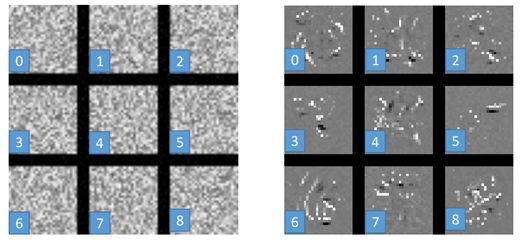
那么经过上面的步骤,还原得到的x的结果如图所示:

一共50个filter,这里取前12个,每个图片的意思代表1个filter所还原得到的图片x,也就是说,比如第一张图片,将其作为input丢进上面那个网络后,其输出与第一个filter作用后得到的ak最大。
仔细观察一下上面的图,还是有一定的规律可循的。
同时我们也可以去查看fully-connection部分的神经元,原理跟上面一样,不过再求解释时又多了一层反向传播的过程,如图:

当然也可以去拿输出层的神经元,比如识别结果为0,输出层在第0维值就很大,然后一样根据上面的原理得到的结果如图:

会发现得到的结果什么也看不到,但是当把某张图片再次输入进网络之后,得到的确实是对应的结果。
这也就说明了深度学习很容易被欺骗,但从侧面也反映出了,深度学习确实学习到了某些特征,并非仅仅简单“记住”数据,也说明深度学习的“玄学”性,难以解释。
当然,在上面的求解过程中,我们可以适当加一些限制,比如正则化:

那么得到的结果如图:
发现结果稍微清晰了一些,有些能够看到一些笔画。
那么正则化的目的是在保证y越大越高的同时,也要使得xij(图片中的每一个pixel)越小越好,也就是说对于图片显示(白色的是笔画,黑色的是空白)时,尽可能使空白减少,能连的连起来。所以效果会好些。
3.3 微分
对于一张图片的识别,我们可以计算类别y对图像像素pixel的微分的值:
通过改变像素xij,来看这个像素对识别的影响是否重要,也就是说,当xij稍微做一下改变,对识别的结果影响有多大,用这样的方法可以得到如下的结果:
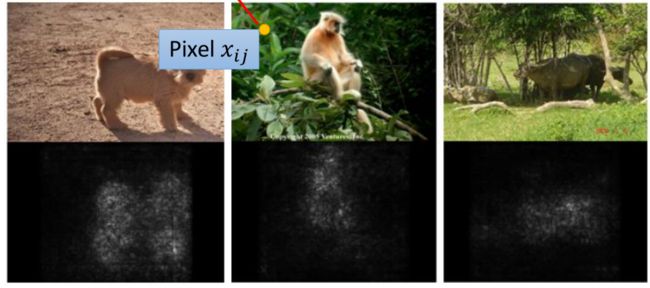
白色区域表示对识别影响较为重要的pixel,可以大概看到一些形状。那这样做有什么意义呢?
有时当我们从网上爬取图片进行建模后,发现对马的识别率很高,但对其他的识别一般,这是因为可能关于“马”的图片都包含“horse”字样的标签,机器真正识别到的是“horse”的标签,而并非知道马长什么样子。
同样的道理,我们可以通过盖住图片的一部分,去看看盖住的部分结果的影响有多大,比如:

图中灰色的区域是被盖住的,不断移动灰色的区域,看对结果的影响有多大,那么可以获取到下面一样的热力图:

图中颜色越浅表示对辨识的结果影响越大,越不能辨别出是什么,可以看到,第一张当盖住狗的脸的时候,很难分辨出狗;
第二张图片当盖住轮胎部分的时候,就很难辨别出轮胎;
第三张图片当盖住狗的身子的部分,就很难辨别出狗了。
更多有关CNN可视化的内容,可搜索一些有关博客进行学习:https://blog.csdn.net/xys430381_1/article/details/90413169
4.关于CNN一些有趣的应用
根据上面的理论,我们可以通过修改某个filter的参数,去还原出一张另类的图片,比较有趣的应用有deep dream和风格迁移,如下图(图片来源于网络):
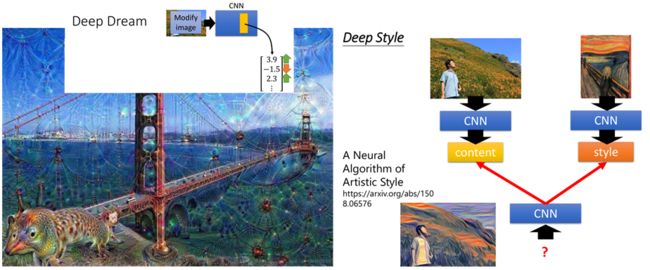
这里就暂时不具体介绍原理了,后面会找一些开源的项目去玩。
参考资料:台大李宏毅《机器学习-卷积神经网络》
上面是对CNN进行的一个初步的介绍,后面会对深度学习部分进行系统的学习和整理,这里主要是对原理有个初步的认识,因此很多都是概念性的东西,后续会进一步添加补充。