强化学习教程(四):从PDG到DDPG的原理及tf代码实现详解
强化学习教程(四):从PDG到DDPG的原理及tf代码实现详解
原创 lrhao 公众号:ChallengeHub
收录于话题
#强化学习教程
前言
在前面强化学习教程(三)中介绍了基于策略「PG」算法,相比较DQN算法,PG是一种学习连续行为控制策略的方法,通过概率分布分布函数π,来表示每一步的最优策略,在每一步根据该概率分布进行action采样,获取当前最佳的action取值,即:
生成action的过程,本质是一个随机过程,最后学习到的策略,也是一个随机策略(stochastic polic)。
1.DPG
确定性策略梯度(Deterministic Policy Gradient,DPG),每一步的行为通过函数μ直接获得确定的值:
图片
这个函数μ即最优行为策略,不再是一个需要采样的随机策略。
我们在强化学习教程(三)中知道,策略梯度的损失函数就是负的最大化奖励函数,即策略梯度就是沿着使得目标函数变大的方向调整策略的参数,定义如下:

在上述公式中,我们能能够发现J函数主要与策略梯度和值函期望有关,因此为了解决策略和值函数之间的问题,采用一种新的思路将两个网络分开,即Actor-Critic网络。
1.1Actor-Critic
从命名中中可以显而易见知道这两个网络的工作流程:即
Actor(演员)-Critic(评论家)框架,相当于演员和评论家共同来提升表演,演员跳舞的姿态可能动作不到位,于是评论家告诉演员,你这样跳舞不好,它会建议演员修改一下舞姿了,当演员在某个舞姿上表演的比较好,那评论家就会告诉演员, 不错,你可以加大力度往这个方向发展,是不是明白其中的意思了?
在Actor-Critic(AC)框架中:
使用acotr神经网络来近似策略函数,输入时obsseraction(obs),输出action(a);
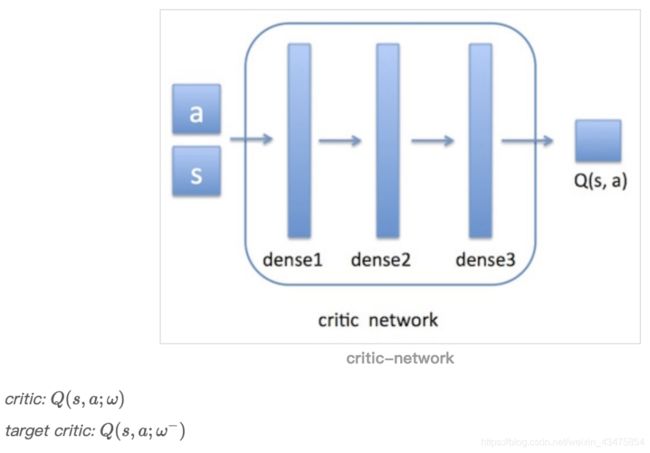
critic神经网络来近似值函数,输入是action和obs [a, s],输出是Q(s, a)。

AC框架的流程:首先环境会给出一个obs,智能体根据actor网络(后面会讲到在此网络基础上增加噪声)做出决策action,环境收到此action后会给出一个奖励reward,及新的obs。这个过程是一个step。此时我们要根据reward去更新critic网络,然后沿critic建议的方向去更新actor网络。接着进入下一个step。如此循环下去,直到我们训练出了一个好的actor网络。
那么每次迭代如何更新这两个神经网络的参数呢?
与DQN一样,DDPG中也使用了target网络来保证参数的收敛:
假设critic网络为Q(s,a;ω),他对应的target critic网络为
Q(s,a;ω−)。
actor网络为π(s;θ),它对应的target actor网络为
π(s;θ−)。
1.1.1actor网络更新
actor网络用于参数化策略。这里涉及到之前说到的策略梯度Policy Gradient。


Tips:策略梯度这一块可以分为四种情况分别讨论:stochastic on-policy, stochastic off-policy, deterministic on-policy 和 deterministic off-policy,其实就是决定性策略和随机性策略,对应的在线学习和离线学习两辆组合。
确定性策略梯度定理提供了更新确定性策略的方法。将此方法用到Actor-Critic算法中:
(1) On-Policy Deterministic Actor-Critic
由于使用的是Sarsa(是一种在线学习算法)更新critic,因此是一种在线的确定性AC策略
(2) Off-Policy Deterministic Actor-Critic
由于使用的是Q-Learning更新critic,因此是一种离线的确定性AC策略
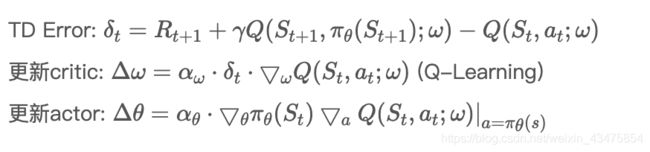
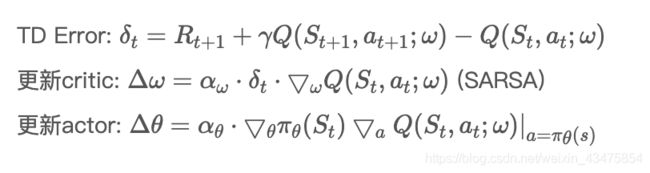
1.1.2critic网络更新
critic网络用于值函数近似,更新方式与DQN中的类似:

然后使用梯度下降法进行更新。
注意:actor和critic都使用了target网络来计算target。
2.DDPG
深度确定性策略梯度(Deep Deterministic Policy Gradient,DDPG)是将深度学习神经网络融合进DPG的策略学习方法,相比较DPG核心改进地方在于:
采用卷积神经网络作为策略函数μ和Q函数的模拟,即策略网络和Q网络;然后使用深度学习的方法来训练上述神经网络。
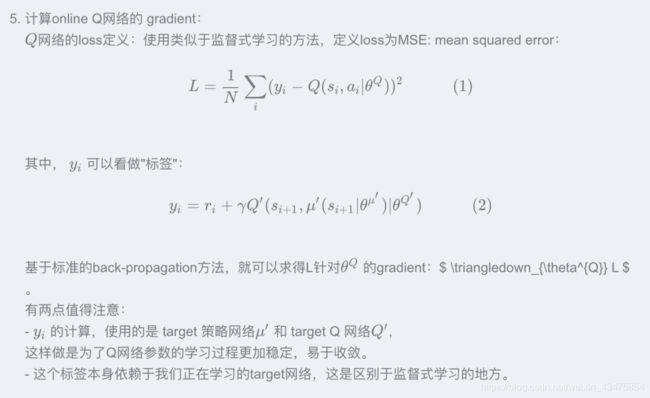
在DQN中使用单个Q神经网络算法,学习过程很不稳定,
因为Q网络的参数在频繁gradient update的同时,又用于计算Q网络和策略网络的gradient:

在训练完一个mini-batch的数据之后,通过SGA/SGD算法更新online网络的参数,然后再通过soft update算法更新 target 网络的参数。soft update是一种running average的算法:
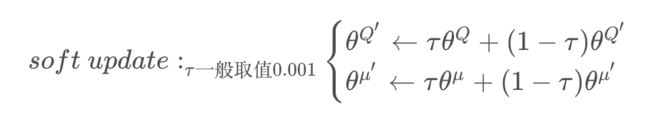
优点:target网络参数变化小,用于在训练过程中计算online网络的gradient,比较稳定,训练易于收敛。
代价:参数变化小,学习过程变慢。
DDPG核心思想
采用经验回放方法
采用target目标网络更新,不过DQN中的target更新是hard update,即每隔固定步数更新一次target网络,DDPG使用soft update,每一步都会更新target网络,只不过更新的幅度非常小
AC框架
确定性策略梯度
DDPG算法流程
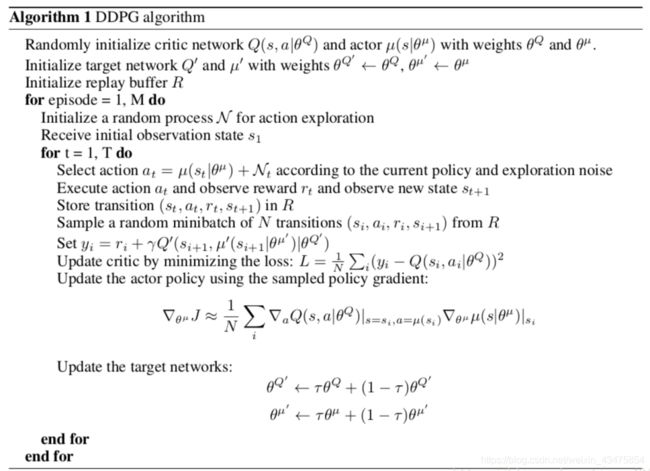
初始化actor-critic神经网络thea_Q、thea_u
将online网络参数拷贝给对应target网络
初始化replay memory buffer R;
for each episode:
初始化UO随机过程;
for t = 1,T:
下面的步骤与DDPG算法实现框架图中步骤编号对应:



DDPG实现框架:

总结一下:
actor-critic框架是一个在循环的episode和时间步骤条件下,通过环境、actor和critic三者交互,来迭代训练策略网络、Q网络的过程。
DDPG对于DPG的关键改进
- 使用卷积神经网络来模拟策略函数和Q函数,并用深度学习的方法来训练,证明了在RL方法中,非线性模拟函数的准确性和高性能、可收敛;
- 而DPG中,可以看成使用线性回归的机器学习方法:使用带参数的线性函数来模拟策略函数和Q函数,然后使用线性回归的方法进行训练。
- experience replay memory的使用:actor同环境交互时,产生的transition数据序列是在时间上高度关联(correlated)的,如果这些数据序列直接用于训练,会导致神经网络的overfit,不易收敛。
- DDPG的actor将transition数据先存入experience replay buffer, 然后在训练时,从experience replay buffer中随机采样mini-batch数据,这样采样得到的数据可以认为是无关联的。
- target 网络和online 网络的使用, 使的学习过程更加稳定,收敛更有保障。
DDPG算法应用
下面展示DDPG算法将杆子立起来的一个应用
1import tensorflow as tf
2import numpy as np
3import gym
4import time
5
6# 定义超参数
7MAX_EPISODES = 200
8MAX_EP_STEPS = 200
9LR_A = 0.001 # actor学习率
10LR_C = 0.002 # critic学习率
11GAMMA = 0.9 # 累计折扣奖励因子
12TAU = 0.01 # 软更新tao
13MEMORY_CAPACITY = 10000 # buffer R, 经验回放容器
14BATCH_SIZE = 32 # 每批随机读取批次大小
15
16RENDER = False
17ENV_NAME = 'Pendulum-v0'
18
19# 定义DDPG类
20class DDPG(object):
21 def __init__(self, a_dim, s_dim, a_bound,):
22 # memory 存放的是序列(s,a,r,s+1)= s*2+a+1(r=1)
23 self.memory = np.zeros((MEMORY_CAPACITY, s_dim * 2 + a_dim + 1), dtype=np.float32)
24 self.pointer = 0
25 self.sess = tf.Session()
26
27 self.a_dim, self.s_dim, self.a_bound = a_dim, s_dim, a_bound,
28 self.S = tf.placeholder(tf.float32, [None, s_dim], 's')
29 self.S_ = tf.placeholder(tf.float32, [None, s_dim], 's_')
30 self.R = tf.placeholder(tf.float32, [None, 1], 'r')
31
32 # 建立网络,actor网络输入是S,critic输入是s,a
33 self.a = self._build_a(self.S,)
34 q = self._build_c(self.S, self.a, )
35
36 a_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope='Actor')
37 c_params = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope='Critic')
38 # soft updating
39 """
40 tf.train.ExponentialMovingAverage(decay)是采用滑动平均的方法更新参数。这个函数初始化需要提供一个衰减速率(decay),用于控制模型的更新速度。这个函数还会维护一个影子变量(也就是更新参数后的参数值),这个影子变量的初始值就是这个变量的初始值,影子变量值的更新方式如下:
41 shadow_variable = decay * shadow_variable + (1-decay) * variable
42 shadow_variable是影子变量,variable表示待更新的变量,也就是变量被赋予的值,decay为衰减速率。decay一般设为接近于1的数(0.99,0.999)。decay越大模型越稳定,因为decay越大,参数更新的速度就越慢,趋于稳定。
43 """
44
45 ema = tf.train.ExponentialMovingAverage(decay=1 - TAU) # soft replacement
46 def ema_getter(getter, name, *args, **kwargs):
47 return ema.average(getter(name, *args, **kwargs))
48
49 target_update = [ema.apply(a_params), ema.apply(c_params)] # soft update operation
50 a_ = self._build_a(self.S_, reuse=True, custom_getter=ema_getter) # replaced target parameters
51 q_ = self._build_c(self.S_, a_, reuse=True, custom_getter=ema_getter)
52
53 a_loss = - tf.reduce_mean(q) # maximize the q
54 self.atrain = tf.train.AdamOptimizer(LR_A).minimize(a_loss, var_list=a_params)
55
56 with tf.control_dependencies(target_update): # soft replacement happened at here
57 q_target = self.R + GAMMA * q_
58 td_error = tf.losses.mean_squared_error(labels=q_target, predictions=q)
59 self.ctrain = tf.train.AdamOptimizer(LR_C).minimize(td_error, var_list=c_params)
60
61 self.sess.run(tf.global_variables_initializer())
62
63 # 选取动作函数
64 def choose_action(self, s):
65 return self.sess.run(self.a, {self.S: s[np.newaxis, :]})[0]
66
67 # 从R buffer中学习
68 def learn(self):
69 indices = np.random.choice(MEMORY_CAPACITY, size=BATCH_SIZE)
70 bt = self.memory[indices, :]
71 bs = bt[:, :self.s_dim]
72 ba = bt[:, self.s_dim: self.s_dim + self.a_dim]
73 br = bt[:, -self.s_dim - 1: -self.s_dim]
74 bs_ = bt[:, -self.s_dim:]
75
76 self.sess.run(self.atrain, {self.S: bs})
77 self.sess.run(self.ctrain, {self.S: bs, self.a: ba, self.R: br, self.S_: bs_})
78
79 # 存储序列
80 def store_transition(self, s, a, r, s_):
81 transition = np.hstack((s, a, [r], s_))
82 index = self.pointer % MEMORY_CAPACITY # replace the old memory with new memory
83 self.memory[index, :] = transition
84 self.pointer += 1
85
86 # 建立actor网络(输入S_dim,输出a_dim, 采用tanh激活函数)
87 def _build_a(self, s, reuse=None, custom_getter=None):
88 trainable = True if reuse is None else False
89 with tf.variable_scope('Actor', reuse=reuse, custom_getter=custom_getter):
90 net = tf.layers.dense(s, 30, activation=tf.nn.relu, name='l1', trainable=trainable)
91 a = tf.layers.dense(net, self.a_dim, activation=tf.nn.tanh, name='a', trainable=trainable)
92 return tf.multiply(a, self.a_bound, name='scaled_a')
93
94 # 建立critic网络(输入S_dim,s_dim, 输出q)
95 def _build_c(self, s, a, reuse=None, custom_getter=None):
96 trainable = True if reuse is None else False
97 with tf.variable_scope('Critic', reuse=reuse, custom_getter=custom_getter):
98 n_l1 = 30
99 w1_s = tf.get_variable('w1_s', [self.s_dim, n_l1], trainable=trainable)
100 w1_a = tf.get_variable('w1_a', [self.a_dim, n_l1], trainable=trainable)
101 b1 = tf.get_variable('b1', [1, n_l1], trainable=trainable)
102 net = tf.nn.relu(tf.matmul(s, w1_s) + tf.matmul(a, w1_a) + b1)
103 return tf.layers.dense(net, 1, trainable=trainable) # Q(s,a)
104
105
106# training process
107
108# 环境初始化
109env = gym.make(ENV_NAME)
110env = env.unwrapped
111env.seed(1)
112
113# 获取s,a的维度
114s_dim = env.observation_space.shape[0]
115a_dim = env.action_space.shape[0]
116a_bound = env.action_space.high
117
118ddpg = DDPG(a_dim, s_dim, a_bound)
119
120var = 3 # 定义探索因子
121
122t1 = time.time()
123for i in range(MAX_EPISODES):
124 s = env.reset()
125 ep_reward = 0
126 for j in range(MAX_EP_STEPS):
127 if RENDER:
128 env.render()
129
130 # 添加探索噪音
131 a = ddpg.choose_action(s)
132 a = np.clip(np.random.normal(a, var), -2, 2) # 随机选取动作探索
133 # np.clip()函数是,如果随机生成的数字大于2,则为2 ,如果小于-2,则为-2,其他则为本身
134
135 s_, r, done, info = env.step(a)
136 ddpg.store_transition(s, a, r / 10, s_)
137
138 if ddpg.pointer > MEMORY_CAPACITY:
139 var *= .9995 # 减缓动作探索度,即衰减速率
140 ddpg.learn()
141
142 s = s_
143 ep_reward += r
144 if j == MAX_EP_STEPS-1:
145 print('Episode:', i, ' Reward: %i' % int(ep_reward), 'Explore: %.2f' % var, )
146 # if ep_reward > -300:RENDER = True
147 break
148
149print('Running time: ', time.time() - t1)

参考资料
- https://blog.csdn.net/gsww404/article/details/80403150
- https://blog.csdn.net/kenneth_yu/article/details/78478356
- https://wanjun0511.github.io/2017/11/19/DDPG/
END
欢迎加入学习交流群

添加助手微信,可加入微信交流群

