60、在Visual Studio 2019 环境下,使用C#调用C++生成的dll实现yolov5的图片检测
基本思想:写了一个简单的c#调用c++的dll库图形化界面程序,完成yolov5检测图片的分类
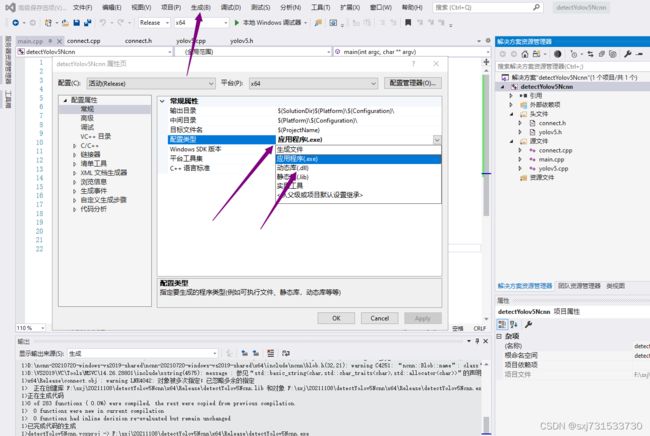
一、创建一个c++工程,详细的构建和配置环境就不详细累述了,贴代码吧,导入opencv和ncnn库即可,因为需要考虑使用C#调用,所以改的代码尽量迎合C#调用的风格
main.cpp
#include "connect.h"
int main(int argc, char** argv)
{
cv::Mat image = cv::imread("F:\\sxj\\predictions.jpg");
unsigned char* src = image.data;
cv::Mat result = cv::Mat(image.rows, image.cols, CV_8UC3, src);
unsigned char* dest = result.data;
const char* model_param = "F:\\sxj\\20211201\\yolov5s_6.0.param";
const char* model_bin = "F:\\sxj\\20211201\\yolov5s_6.0.bin";
ConnectCppWrapper::init_model(model_param, model_bin);
ConnectCppWrapper::detect_image(src, dest, image.rows, image.cols);
cv::imshow("demo", result);
cv::waitKey(0);
return 0;
}connect.h
#pragma once
#include "yolov5.h"
namespace ConnectCppWrapper
{
extern "C" __declspec(dllexport) int __stdcall init_model(const char* model_param, const char* bin_param);
extern "C" __declspec(dllexport) int __stdcall detect_image(unsigned char* ImageBuffer, unsigned char* ImageResult, int imageWidth, int imageHeight);
}connect.cpp
#include "connect.h"
namespace ConnectCppWrapper
{
Yolov5* yolov5Item = new Yolov5();
int __stdcall init_model(const char* model_param, const char* bin_param)
{
return yolov5Item->init_model(model_param, bin_param);
}
int __stdcall detect_image(unsigned char* ImageBuffer, unsigned char* ImageResult, int imageWidth, int imageHeight)
{
cv::Mat result;
cv::Mat image = cv::Mat(imageHeight, imageWidth, CV_8UC3, ImageBuffer);
yolov5Item->detect_yolov5(image);
int length = (int)(result.total() * result.elemSize());
unsigned char* buffer = new unsigned char[length];
memcpy(ImageResult, result.data, length * sizeof(unsigned char));
return 0;
}
}yolov5.h 这部分代码和模型来自ncnn的example
#pragma once
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include
#include
#include
#endif
#include
#include
#include
#define YOLOV5_V60 1 //YOLOv5 v6.0
using namespace std;
using namespace ncnn;
struct Object
{
cv::Rect_ rect;
int label;
float prob;
};
class Yolov5 {
public:
Yolov5();
~Yolov5();
private:
float intersection_area(const Object& a, const Object& b);
void qsort_descent_inplace(std::vector yolov5.cpp
#include "yolov5.h"
#if YOLOV5_V60
#define MAX_STRIDE 64
#else
#define MAX_STRIDE 32
class YoloV5Focus : public ncnn::Layer
{
public:
YoloV5Focus()
{
one_blob_only = true;
}
virtual int forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob, const ncnn::Option& opt) const
{
int w = bottom_blob.w;
int h = bottom_blob.h;
int channels = bottom_blob.c;
int outw = w / 2;
int outh = h / 2;
int outc = channels * 4;
top_blob.create(outw, outh, outc, 4u, 1, opt.blob_allocator);
if (top_blob.empty())
return -100;
#pragma omp parallel for num_threads(opt.num_threads)
for (int p = 0; p < outc; p++)
{
const float* ptr = bottom_blob.channel(p % channels).row((p / channels) % 2) + ((p / channels) / 2);
float* outptr = top_blob.channel(p);
for (int i = 0; i < outh; i++)
{
for (int j = 0; j < outw; j++)
{
*outptr = *ptr;
outptr += 1;
ptr += 2;
}
ptr += w;
}
}
return 0;
}
};
DEFINE_LAYER_CREATOR(YoloV5Focus)
#endif //YOLOV5_V60
Yolov5::Yolov5() {
}
Yolov5::~Yolov5() {
}
float Yolov5::intersection_area(const Object& a, const Object& b)
{
cv::Rect_ inter = a.rect & b.rect;
return inter.area();
}
void Yolov5::qsort_descent_inplace(std::vector 先使用vs测试一下

然后再生dll库
58、Visual studio 2019+C#传递Mat数据给C++动态包处理,并将处理结果Mat返回给C#显示、保存_sxj731533730-CSDN博客
二、然后在创建.NET工程,拖拽三个按钮和两个pictureBox画布
Program.cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Threading.Tasks;
using System.Windows.Forms;
using System.IO;
using System.Runtime.InteropServices;
using OpenCvSharp;
using System.Drawing;
using OpenCvSharp.Extensions;
using System.Text;
namespace WindowsFormsApp1
{
static class Program
{
[DllImport(@"F:\sxj\20211108\detectYolov5Ncnn\x64\Release\detectYolov5Ncnn.dll",
CharSet = CharSet.Ansi,
CallingConvention = CallingConvention.StdCall)]
public static extern int init_model(StringBuilder model_param, StringBuilder model_bin);
///
/// 应用程序的主入口点。
///
[STAThread]
static void Main()
{
StringBuilder model_param = new StringBuilder("F:\\sxj\\20211201\\yolov5s_6.0.param");
StringBuilder model_bin = new StringBuilder("F:\\sxj\\20211201\\yolov5s_6.0.bin");
init_model(model_param, model_bin);
Application.EnableVisualStyles();
Application.SetCompatibleTextRenderingDefault(false);
Application.Run(new Form1());
}
}
}
Form1.cs
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using OpenCvSharp;
using System.Runtime.InteropServices;
using OpenCvSharp.Extensions;
using System.IO.Compression;
using System.Drawing.Imaging;
namespace WindowsFormsApp1
{
public partial class Form1 : Form
{
[DllImport(@"F:\sxj\20211108\detectYolov5Ncnn\x64\Release\detectYolov5Ncnn.dll")]
public static extern int detect_image(byte[] ImageBuffer, byte[] ImageResult, int imageWidth, int imageHeight);
public Form1()
{
InitializeComponent();
}
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog openFileDialog = new OpenFileDialog();
openFileDialog.Filter = @"jpeg|*.jpg|bmp|*.bmp|gif|*.gif";
if (openFileDialog.ShowDialog() == DialogResult.OK)
{
string fullpath = openFileDialog.FileName;
FileStream fs = new FileStream(fullpath, FileMode.Open);
byte[] picturebytes = new byte[fs.Length];
BinaryReader br = new BinaryReader(fs);
picturebytes = br.ReadBytes(Convert.ToInt32(fs.Length));
MemoryStream ms = new MemoryStream(picturebytes);
Bitmap bmpt = new Bitmap(ms);
pictureBox1.Image = bmpt;
pictureBox1.SizeMode = PictureBoxSizeMode.StretchImage;
}
else {
MessageBox.Show("图片打开失败");
}
}
private void button2_Click(object sender, EventArgs e)
{
SaveFileDialog saveImageDialog = new SaveFileDialog();
saveImageDialog.Title = "图片保存";
saveImageDialog.Filter = @"jpeg|*.jpg|bmp|*.bmp";
saveImageDialog.FileName = System.DateTime.Now.ToString("yyyyMMddHHmmss");//设置默认文件名
if (saveImageDialog.ShowDialog() == DialogResult.OK)
{
string fileName = saveImageDialog.FileName.ToString();
//Console.WriteLine("fileName" + fileName);
if (fileName != "" && fileName != null)
{
string fileExtName = fileName.Substring(fileName.LastIndexOf(".") + 1).ToString();
//Console.WriteLine("fileExtName" + fileExtName);
System.Drawing.Imaging.ImageFormat imgformat = null;
if (fileExtName != "")
{
switch (fileExtName)
{
case "jpg":
imgformat = System.Drawing.Imaging.ImageFormat.Jpeg;
break;
case "bmp":
imgformat = System.Drawing.Imaging.ImageFormat.Bmp;
break;
default:
imgformat = System.Drawing.Imaging.ImageFormat.Jpeg;
break;
}
try
{
Bitmap bit = new Bitmap(pictureBox2.Image);
MessageBox.Show(fileName);
pictureBox2.Image.Save(fileName, imgformat);
}
catch
{
}
}
}
}
}
private void button3_Click(object sender, EventArgs e)
{
Bitmap bmp = (Bitmap)pictureBox1.Image.Clone();
byte[] source = GetBGRValues(bmp);
byte[] dest = source;
detect_image(source, dest, bmp.Width, bmp.Height);
Bitmap bmpConvert = Byte2Bitmap(dest, bmp.Width, bmp.Height);
Image images = bmpConvert;
pictureBox2.Image = images;
pictureBox2.SizeMode = PictureBoxSizeMode.StretchImage;
}
public static byte[] GetBGRValues(Bitmap bmp)
{
var rect = new Rectangle(0, 0, bmp.Width, bmp.Height);
var bmpData = bmp.LockBits(rect, System.Drawing.Imaging.ImageLockMode.ReadOnly, bmp.PixelFormat);
var rowBytes = bmpData.Width * Image.GetPixelFormatSize(bmp.PixelFormat) / 8;
var imgBytes = bmp.Height * rowBytes;
byte[] rgbValues = new byte[imgBytes];
IntPtr ptr = bmpData.Scan0;
for (var i = 0; i < bmp.Height; i++)
{
Marshal.Copy(ptr, rgbValues, i * rowBytes, rowBytes);
ptr += bmpData.Stride;
}
bmp.UnlockBits(bmpData);
return rgbValues;
}
public static Bitmap Byte2Bitmap(Byte[] data, int width, int height)
{
Bitmap image = new Bitmap(width, height, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
Rectangle rect = new Rectangle(0, 0, image.Width, image.Height);
BitmapData bmData = image.LockBits(rect, ImageLockMode.ReadWrite, image.PixelFormat);
IntPtr ptr = bmData.Scan0;
for (int i = 0; i < image.Height; i++)
{
Marshal.Copy(data, i * image.Width * 3, ptr, image.Width * 3);
ptr = (IntPtr)(ptr.ToInt64() + bmData.Stride);
}
image.UnlockBits(bmData);
return image;
}
private void pictureBox1_Click(object sender, EventArgs e)
{
}
}
}
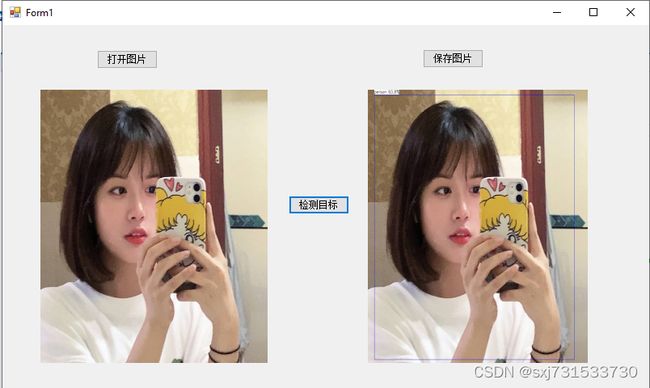
测试效果图
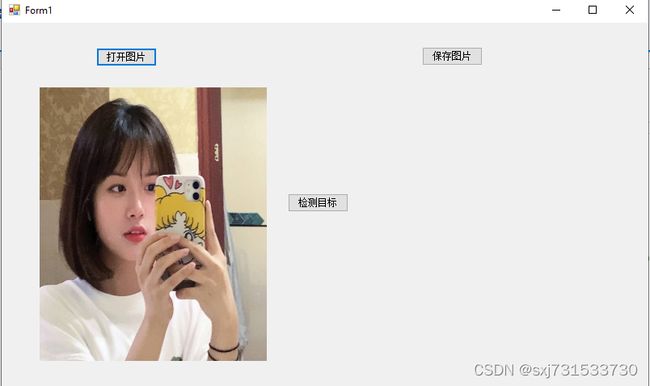
(1)初始化界面

(2)选择一张图
(3)检测出结果