推荐系统(十六)推荐系统中的attention机制
契机
推荐系统中存在各种各样的序列特征,比如手机APP中各个场景下用户的点击行为序列,曝光序列,加入购物车序列等等,如何建模这些序列与target_item之间的关系成为最近大家都在研究的问题。传统处理序列特征的RNN和LSTM模型,由于耗时较多,慢慢不太适用于对耗时要求越来越高的推荐系统。最近attention机制的崛起恰巧能够解决耗时问题,且效果也比较好,所以本文会讲一些自己对推荐系统中的attention机制的理解,不对的地方请大家指出。
target-attention
原理
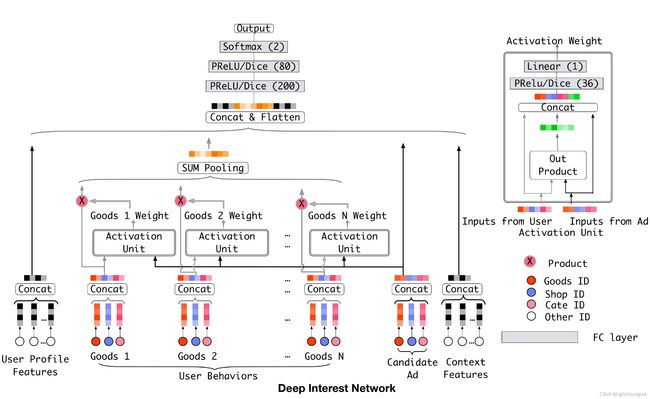
attention机制在推荐系统中第一次广泛应用应该是阿里DIN模型,该模型用attention方式建立了用户历史点击序列与当前待打分item之间的联系,较为成功地解决了序列特征的建模问题,由于整体原理比较简单,在这里不过多讲述。
代码实现
DIN模型作者提供的代码不是特别好理解,组内同事按照自己的理解,改进了下target-attention的实现方法,更符合attention本来 Q , K , V Q,K,V Q,K,V实现机制,代码如下所示,可以看出,target-attention和传统attention之间的区别在于多了一个 W W W,将原先的 K K K转换为 K t r a n s f o r m K_{transform} Ktransform,这样做的好处在于模型并不是强依赖于 K K K,而依赖于 K K K的一个高维抽象表示。传统attention机制实现代码可以参见这里。
# coding=utf-8
import tensorflow as tf
import numpy as np
def target_attention(Q, K, V):
""" target_attention implementation
:param Q:
:param K:
:param V:
:return: target_attention tensor
"""
k1, k2 = K.get_shape().as_list()[-1], Q.get_shape().as_list()[-1]
W = tf.get_variable("w", shape=[k1, k2], initializer=tf.keras.initializers.he_normal())
K_transform = tf.tensordot(K, W, axes=1)
d_k = tf.cast((k1 + k2) / 2, dtype=tf.float32)
logit = tf.matmul(K_transform, tf.expand_dims(Q, axis=-1)) / tf.sqrt(d_k)
weight = tf.nn.softmax(tf.squeeze(logit, axis=-1), axis=-1)
attention = tf.matmul(tf.expand_dims(weight, axis=1), V)
return tf.squeeze(attention, axis=1)
if __name__ == '__main__':
seq_len = 3
embedding_size = 4
seq_tensor = tf.placeholder(dtype=tf.float32, shape=(None, seq_len, embedding_size)) # 序列特征
target_tensor = tf.placeholder(dtype=tf.float32, shape=(None, embedding_size)) # target_item
t_attn = target_attention(target_tensor, seq_tensor, seq_tensor)
feed_dict = {
target_tensor: np.array([
[3.0, 4.0, 5.0, 6.0]
]),
seq_tensor: np.array([[
[1.0, 2.0, 3.0, 4.0],
[5.0, 6.0, 7.0, 8.0],
[9.0, 10.0, 11.0, 12.0]
]])
}
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
t_attn_out = sess.run(t_attn, feed_dict=feed_dict)
print(t_attn_out)
通常情况下,推荐系统中attention的 K K K和 V V V都为用户的点击序列,序列由item_id组成, Q Q Q为target_item_id;但也有许多变种,比如 Q Q Q为item_id + item_side_info,期望通过增加side_info来增加模型稳定性;或者 Q Q Q为点击序列的均值, K K K和 V V V为曝光未点击序列,期望利用点击序列过滤掉曝光未点击序列中用户感兴趣的item。
对于推荐系统中的target_attention,debug和case排查一直都是比较难解决的问题。个人建议是把 Q Q Q和 K K K组合计算后的权重(即上述代码的weight)打印出来,分析一下均值、方差以及直方图分布,就能在一定程度上发现问题。举个例子,如果发现所有权重的均值都差不多,说明attention压根就没起作用,要么是序列特征出问题了,要么是target_item构造的emb有问题,这样由果推因定位问题的速度还是比较快的。
self-attention
self-attention顾名思义,就是自己学习自己的attention权重,旨在增强序列内部各元素之间的联系,更像是一种可学习的归一化操作,具体代码如下所示:
import tensorflow as tf
def attention(Q, K, scaled_=True):
""" attention implementation
:param Q:
:param K:
:param scaled_: whether scaling logit by sqrt{dim of K}
:return: attention result
"""
logit = tf.matmul(Q, K, transpose_b=True) # [batch_size, sequence_length, sequence_length]
if scaled_:
d_k = tf.cast(tf.shape(K)[-1], dtype=tf.float32)
logit = tf.divide(logit, tf.sqrt(d_k)) # [batch_size, sequence_length, sequence_length]
weight = tf.nn.softmax(logit, dim=-1) # [batch_size, sequence_length, sequence_length]
return weight
def self_attention(Q, K, V):
""" self_attention implementation
:param V:
:param K:
:param Q:
:return: self attention result
"""
weight = attention(Q, K) # [batch_size, sequence_length, sequence_length]
s_attn = tf.matmul(weight, V) # [batch_size, sequence_length, n_classes]
return s_attn
排查self-attention的问题所用的手段,个人理解和target-attention比较类似,观察下weight的分布情况,进而由果推因。
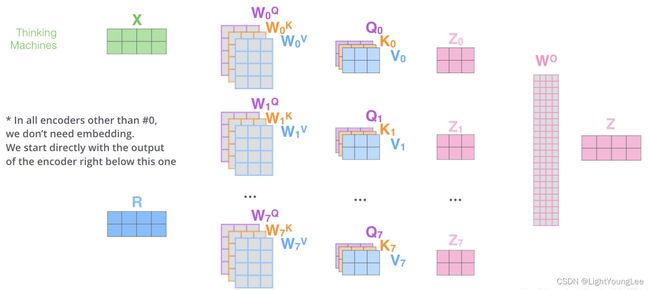
multi-head attention
multi-head attention是在self-attention上做进一步拓展,具体原理如下图所示,
代码参考这里,如下所示。
class MultiHeadAttention(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads):
super(MultiHeadAttention, self).__init__()
self.num_heads = num_heads
self.d_model = d_model
assert d_model % self.num_heads == 0
self.depth = d_model // self.num_heads
self.wq = tf.keras.layers.Dense(d_model)
self.wk = tf.keras.layers.Dense(d_model)
self.wv = tf.keras.layers.Dense(d_model)
self.dense = tf.keras.layers.Dense(d_model)
def split_heads(self, x, batch_size):
"""
分拆最后一个维度到 (num_heads, depth).
转置结果使得形状为 (batch_size, num_heads, seq_len, depth)
"""
x = tf.reshape(x, (batch_size, -1, self.num_heads, self.depth))
return tf.transpose(x, perm=[0, 2, 1, 3])
def call(self, v, k, q):
batch_size = tf.shape(q)[0]
# 第一步
q = self.wq(q) # (batch_size, seq_len, d_model)
k = self.wk(k) # (batch_size, seq_len, d_model)
v = self.wv(v) # (batch_size, seq_len, d_model)
# 第二步
q = self.split_heads(q, batch_size) # (batch_size, num_heads, seq_len_q, depth)
k = self.split_heads(k, batch_size) # (batch_size, num_heads, seq_len_k, depth)
v = self.split_heads(v, batch_size) # (batch_size, num_heads, seq_len_v, depth)
# 第三步
scaled_attention = self_attention(q, k, v) # (batch_size, num_heads, seq_len_q, depth)
scaled_attention = tf.transpose(scaled_attention, perm=[0, 2, 1, 3]) # (batch_size, seq_len_q, num_heads, depth)
# 第四步
concat_attention = tf.reshape(scaled_attention, (batch_size, -1, self.d_model)) # (batch_size, seq_len_q, d_model)
# 第五步
m_attention = self.dense(concat_attention) # (batch_size, seq_len_q, d_model)
return m_attention
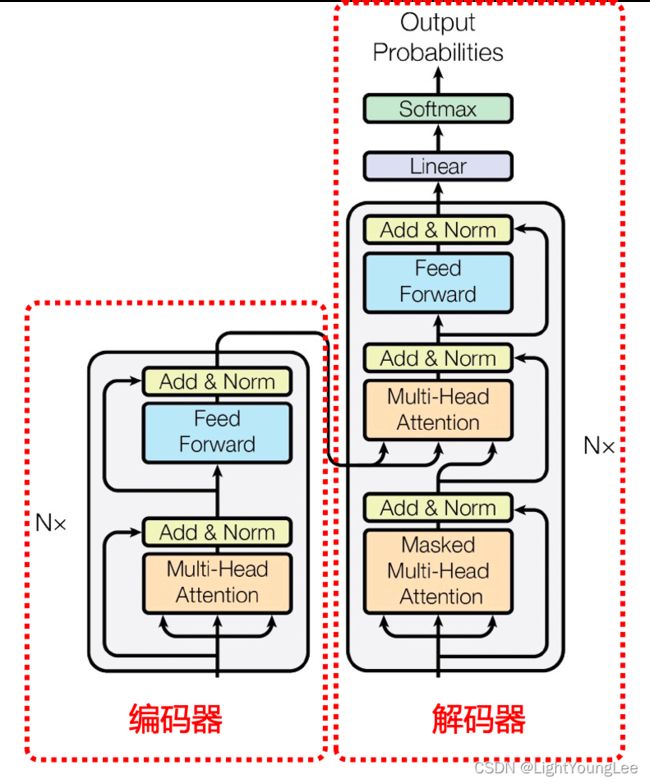
transformer
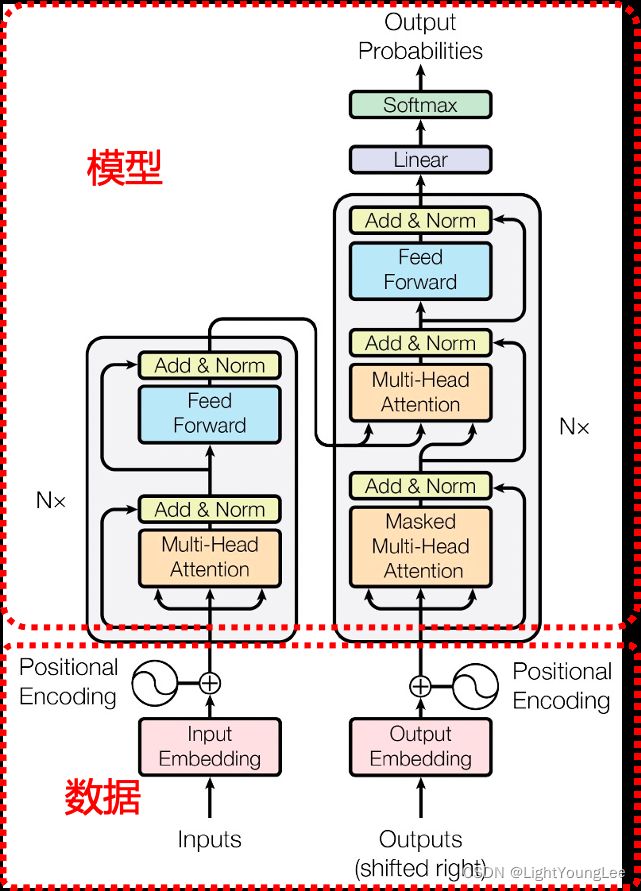
transformer总体结构如下图所示,
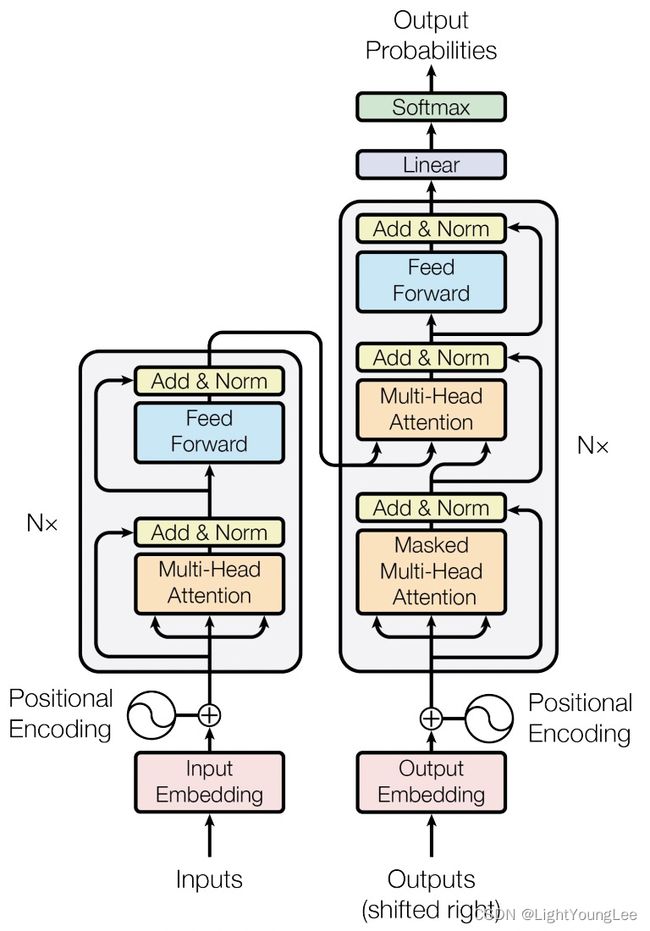
整体流程分为两块:数据和模型。
输入数据是positional encoding,核心是对embedding进行再编码,这里不赘述。模型分为编码器和解码器,下面会具体讲述这两个部件。
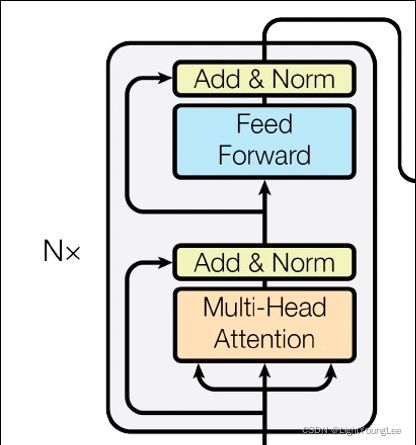
编码器
编码器(Encoder)的任务是把输入position encoding转化为较为高阶的表示。它由N个EncodeLayer组成,具体示意图和代码如下,后续会逐步解析。
class Encoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, input_vocab_size,
maximum_position_encoding, rate=0.1):
super(Encoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(input_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding,
self.d_model)
self.enc_layers = [EncoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
seq_len = tf.shape(x)[1]
# 将嵌入和位置编码相加。
x = self.embedding(x) # (batch_size, input_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x = self.enc_layers[i](x, training, mask)
return x # (batch_size, input_seq_len, d_model)
从代码可以看出,当前EncoderLayer输入为上一个EncodeLayer的输出,符合seq2seq模型中编码器的定义。
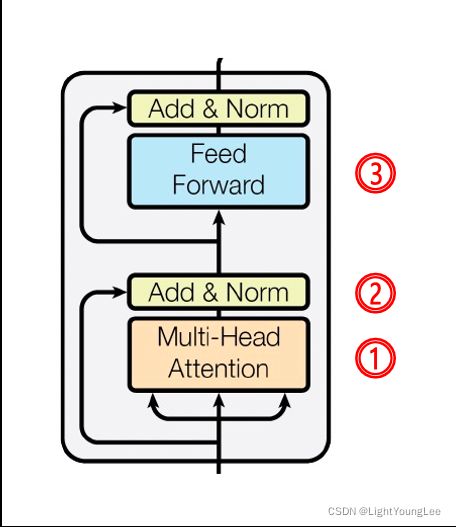
EncodeLayer
EncodeLayer由3个部分组成:masked-multi-head attention、残差网络和前向反馈网络,具体示意图和代码如下,后续会逐步解析。
class EncoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(EncoderLayer, self).__init__()
self.mha = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
attn_output, _ = self.mha(x, x, x, mask) # (batch_size, input_seq_len, d_model)
attn_output = self.dropout1(attn_output, training=training)
out1 = self.layernorm1(x + attn_output) # (batch_size, input_seq_len, d_model)
ffn_output = self.ffn(out1) # (batch_size, input_seq_len, d_model)
ffn_output = self.dropout2(ffn_output, training=training)
out2 = self.layernorm2(out1 + ffn_output) # (batch_size, input_seq_len, d_model)
return out2
masked-multi-head attention
第一部分是masked-multi-head attention,它multi-head attention的区别在于,计算第k个位置上attention_score时,把后面的输入信息都置为0。具体代码如下所示:
def create_look_ahead_mask(size):
mask = 1 - tf.linalg.band_part(tf.ones((size, size)), -1, 0)
return mask # (seq_len, seq_len)
残差网络
第二部分是残差网络,指类似resnet的残差结构 + layer_norm,这里不再赘述。
前向反馈网络
第三部分是前向反馈网络,即为DNN全连接网络。
def point_wise_feed_forward_network(d_model, dff):
return tf.keras.Sequential([
tf.keras.layers.Dense(dff, activation='relu'), # (batch_size, seq_len, dff)
tf.keras.layers.Dense(d_model) # (batch_size, seq_len, d_model)
])
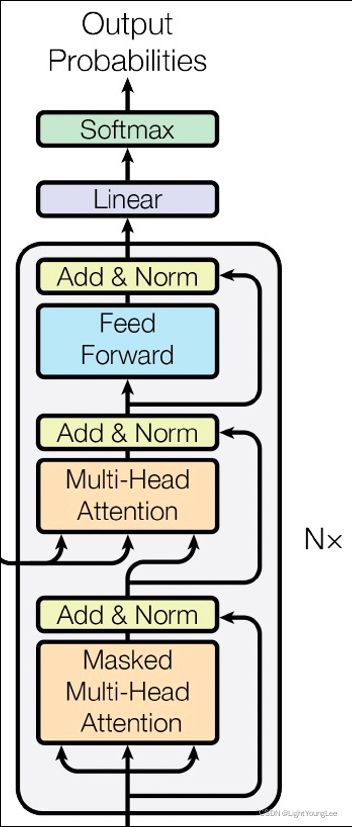
解码器
解码器(Decoder)的原理比Encoder相对复杂些,由N个DecodeLayer组成,具体示意图和代码如下所示,然后逐层去解析。
class Decoder(tf.keras.layers.Layer):
def __init__(self, num_layers, d_model, num_heads, dff, target_vocab_size,
maximum_position_encoding, rate=0.1):
super(Decoder, self).__init__()
self.d_model = d_model
self.num_layers = num_layers
self.embedding = tf.keras.layers.Embedding(target_vocab_size, d_model)
self.pos_encoding = positional_encoding(maximum_position_encoding, d_model)
self.dec_layers = [DecoderLayer(d_model, num_heads, dff, rate)
for _ in range(num_layers)]
self.dropout = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
seq_len = tf.shape(x)[1]
attention_weights = {
}
x = self.embedding(x) # (batch_size, target_seq_len, d_model)
x *= tf.math.sqrt(tf.cast(self.d_model, tf.float32))
x += self.pos_encoding[:, :seq_len, :]
x = self.dropout(x, training=training)
for i in range(self.num_layers):
x, block1, block2 = self.dec_layers[i](x, enc_output, training,
look_ahead_mask, padding_mask)
attention_weights['decoder_layer{}_block1'.format(i + 1)] = block1
attention_weights['decoder_layer{}_block2'.format(i + 1)] = block2
# x.shape == (batch_size, target_seq_len, d_model)
return x, attention_weights
从上面代码可以看出,Decoder的整体流程是先经过一个DecoderLayer,然后之后的每个DecoderLayer的输入Q为上一个DecoderLayer的输出,K和V为最后一个Encoder的输出。
DecoderLayer
DecoderLayer的基本组成部分和Encoder大体类似,这里直接上代码:
class DecoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(DecoderLayer, self).__init__()
self.mha1 = MultiHeadAttention(d_model, num_heads)
self.mha2 = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff)
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm3 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
self.dropout3 = tf.keras.layers.Dropout(rate)
def call(self, x, enc_output, training,
look_ahead_mask, padding_mask):
# enc_output.shape == (batch_size, input_seq_len, d_model)
attn1, attn_weights_block1 = self.mha1(x, x, x, look_ahead_mask) # (batch_size, target_seq_len, d_model)
attn1 = self.dropout1(attn1, training=training)
out1 = self.layernorm1(attn1 + x)
attn2, attn_weights_block2 = self.mha2(
enc_output, enc_output, out1, padding_mask) # (batch_size, target_seq_len, d_model)
attn2 = self.dropout2(attn2, training=training)
out2 = self.layernorm2(attn2 + out1) # (batch_size, target_seq_len, d_model)
ffn_output = self.ffn(out2) # (batch_size, target_seq_len, d_model)
ffn_output = self.dropout3(ffn_output, training=training)
out3 = self.layernorm3(ffn_output + out2) # (batch_size, target_seq_len, d_model)
return out3, attn_weights_block1, attn_weights_block2
从Decoder这一侧可以看出,transformer模型依然符合传统意义上的seq2seq模型的架构,只是每个部件由attention代替。
参考链接
- 阿里DIN模型
- attention应用
- tf官方讲解transformer