【RL】Q-learning走迷宫案例及改进

假设我们用一个 [公式] 的表格表示 [公式] 值,称作 Q-table。就像训练神经网络时初始化模型系数一样,我们首先会初始化这个表格。然后开始与环境进行交互,以游戏为例。一局(一个 episode)内有很多个 step,我们会做一系列的动作,并最终获得胜利/失败(到达结束状态)。在每一个 step 中, 接收到当前状态 [公式] 后,我们就根据当前的 Q-table 选出 [公式] 值最大的动作 [公式] (也有可能用 [公式] 以一定概率随机选动作),执行该动作 [公式] 后,会从环境获得即时奖励 [公式] 和转移到的下一 step 的状态 [公式] 。
由于我们不知道真实的 [公式] 值是多少(不像监督学习那样有label),我们就需要构建一个估计出来的 Q-target(绿色框部分)。像 TD(0) 一样,Q-learning 每次只往前看一步,它会利用执行当前动作 [公式] 后收到的即时奖励 [公式] 和对转移到的状态 [公式] 的最大 [公式] 值来构造 Q-target。直观一点来说就是,马上能得到的,确定的奖励是 [公式] ,估计未来能得到的最大奖励则是 [公式] ,那定下一个小目标,就让当前估计的 [公式] 能往这两者之和靠拢吧!
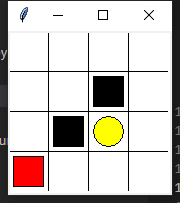
创建迷宫环境
import numpy as np
import time
import sys
import tkinter as tk
import random
UNIT = 40 # pixels 像素
MAZE_H = 4 # grid height 网格高度
MAZE_W = 4 # grid width 网格宽度
class Maze(tk.Tk, object): # 继承
def __init__(self):
super(Maze, self).__init__()
self.action_space = ['u', 'd', 'l', 'r']
self.n_actions = len(self.action_space) # 4
self.title('maze')
self._build_maze()
def _build_maze(self):
# 初始化画布
self.canvas = tk.Canvas(self, bg='white', height=MAZE_H * UNIT, width=MAZE_W * UNIT)
# 画网格
for c in range(0, MAZE_W * UNIT, UNIT):
x0, y0, x1, y1 = c, 0, c, MAZE_H * UNIT # 先描两侧横线上点
self.canvas.create_line(x0, y0, x1, y1) # 将上述的点连成线
for r in range(0, MAZE_H * UNIT, UNIT):
x0, y0, x1, y1 = 0, r, MAZE_W * UNIT, r
self.canvas.create_line(x0, y0, x1, y1)
# 创建一个原点
origin = np.array([20, 20])
# 画一个黑色矩形表示陷阱
hell1_center = origin + np.array([UNIT * 2, UNIT]) # 陷阱的中心点
self.hell1 = self.canvas.create_rectangle( # 根据矩形的两个对角的坐标画矩形
hell1_center[0] - 15, hell1_center[1] - 15,
hell1_center[0] + 15, hell1_center[1] + 15,
fill='black')
# 同上
hell2_center = origin + np.array([UNIT, UNIT * 2])
self.hell2 = self.canvas.create_rectangle(
hell2_center[0] - 15, hell2_center[1] - 15,
hell2_center[0] + 15, hell2_center[1] + 15,
fill='black')
# 画一个圆表示终点
oval_center = origin + UNIT * 2
self.oval = self.canvas.create_oval( # 先根据两个对角点定好矩形,再在矩形里画一个内切圆
oval_center[0] - 15, oval_center[1] - 15,
oval_center[0] + 15, oval_center[1] + 15,
fill='yellow')
# 画一个红色矩阵表示agent
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# 打包
self.canvas.pack()
def reset(self): # 复位
self.update()
time.sleep(0.5) # 0.5后复位
self.canvas.delete(self.rect)
origin = np.array([20, 20])
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# 返回agent的坐标(即所处的state)
#print(self.rect)
return self.canvas.coords(self.rect) # 返回的是一个list
def step(self, action):
s = self.canvas.coords(self.rect) # 获取当前agent的位置
base_action = np.array([0, 0])
if action == 0: # up
if s[1] > UNIT: # 判断这时候是否在上边界,因为要向上移动
base_action[1] -= UNIT
elif action == 1: # down
if s[1] < (MAZE_H - 1) * UNIT: # 同上
base_action[1] += UNIT
elif action == 2: # right
if s[0] < (MAZE_W - 1) * UNIT: # 同上
base_action[0] += UNIT
elif action == 3: # left
if s[0] > UNIT: # 同上
base_action[0] -= UNIT
self.canvas.move(self.rect, base_action[0], base_action[1]) # move agent
s_ = self.canvas.coords(self.rect) # agent执行完动作后所处的位置
# 奖励
if s_ == self.canvas.coords(self.oval): # 如果当前所处位置在圆上
reward = 1
done = True
s_ = 'terminal'
elif s_ in [self.canvas.coords(self.hell1), self.canvas.coords(self.hell2)]:
reward = -1
done = True
s_ = 'terminal'
else:
reward = 0
done = False
return s_, reward, done
def render(self):
time.sleep(0.1) # 时间步长
self.update()
def update():
for t in range(10):
s = env.reset()
while True:
env.render()
a = random.randint(0, 4)
s, r, done = env.step(a)
if done:
break
if __name__ == '__main__':
env = Maze()
env.after(100, update) # 每100毫秒调用一次函数
env.mainloop() # 该方法最后执行,将标签显示在屏幕,进入等待状态(若组件为打包,则不会再窗口中显示)
# 准备响应用户发起的GUI事件(图形用户界面)
智能体
```python
#!/usr/bin/python3
# -*- coding:utf-8 -*-
"""
This part of code is the Q learning brain, which is a brain of the agent.
All decisions are made in here.
View more on my tutorial page: https://morvanzhou.github.io/tutorials/
"""
from tkinter.constants import S
import numpy as np
import pandas as pd
class QLearningTable:
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.95,e_greedy_max = 0.9):
'''
:param actions: 行为
:param learning_rate: 学习率, 来决定这次的误差有多少是要被学习的
:param reward_decay: 是折扣因子,表示时间的远近对回报的影响程度,为0表示之看当前状态采取行动的reward。
:param e_greedy: 是用在决策上的一种策略, 比如 epsilon = 0.9 时, 就说明有90% 的情况我会按照 Q 表的最优值选择行为, 10% 的时间使用随机选行为
'''
self.actions = actions # a list
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon = e_greedy
self.epsilon_max = e_greedy_max
self.q_table = pd.DataFrame(columns=self.actions, dtype=np.float64) #一般行是状态 列是行为
def choose_action(self, observation, episode):
self.check_state_exist(observation) #首先检验传入的数据有没有在Q_table当中,如果没有则加入。当作新的索引值
# action selection
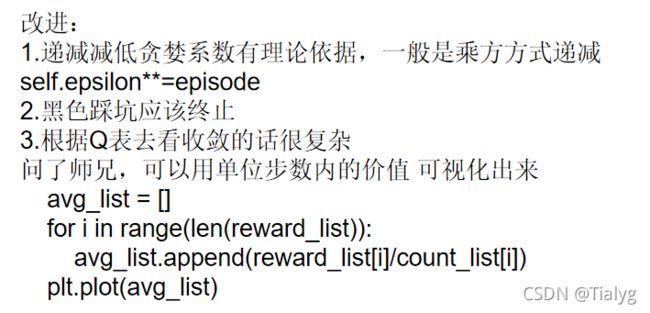
self.epsilon**=episode
if self.epsilon < self.epsilon_max:
pass
else:
self.epsilon = self.epsilon_max
if np.random.uniform() > self.epsilon: #如果随机数<0.9
# choose best action 根据最优结果选择action
state_action = self.q_table.loc[observation, :] #索引 选出这个observation的action值
# some actions may have the same value, randomly choose on in these actions
action = np.random.choice(state_action[state_action == np.max(state_action)].index) #这句话的意思是打乱
#action = state_action.idxmax()
else:
# choose random action 随机选择(10%的可能)
action = np.random.choice(self.actions)
return action
def learn(self, s, a, r, s_): #从这些状态 提升学习q_table
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, :].max() # next state is not terminal
else:
q_target = r # next state is terminal 已经到达了最终状态
self.q_table.loc[s, a] += self.lr * (q_target - q_predict) # update
def check_state_exist(self, state): #检查state
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
主程序流程
#!/usr/bin/python3
# -*- coding:utf-8 -*-
from maze_env import Maze #调用环境
from RL_brain import QLearningTable #调用主方法
import matplotlib.pyplot as plt
import pandas as pd
def update():
reward_list = [] #记录每一个episode的奖励总值
count_list= []
for episode in range(50): #运行100个回合
# initial observation #环境的观测值
observation = env.reset() #初始值的信息 (1,1) (1,2) 观测到的信息
# observation = env.reset()
reward_sum = 0
i = 0
while True:
# fresh env
i+=1
env.render() #刷新环境
# RL choose action based on observation
action = RL.choose_action(str(observation), episode) #先挑选一个动作
# RL take action and get next observation and reward
observation_, reward, done = env.step(action) #observation_下一个状态 #done 判断是否拿到奖励还是跳到坑
# RL learn from this transition 学习
RL.learn(str(observation), action, reward, str(observation_))
# swap observation
observation = observation_ #循环进入下一个状态
# break while loop when end of this episode
reward_sum += reward
if done:
count_list.append(i)
break
reward_list.append(reward_sum)
print(reward_list)
print("第%d回合"%episode)
print(RL.q_table)
RL.q_table.to_csv("./1.csv")
avg_list = []
for i in range(len(reward_list)):
avg_list.append(reward_list[i]/count_list[i])
plt.plot(avg_list)
plt.show()
#print(reward_list)
# end of game
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze() #Maze()环境
RL = QLearningTable(actions=list(range(env.n_actions))) #选择的学习方式
#print(RL.q_table)
env.after(100, update)
#print("hahah")
#print(RL.q_table)
env.mainloop() # 进入消息循环
#找出收敛的方法:
"""
设置了一个reward_list去记录每一episode的值,
画图可视化出来
根据图中-1 和1的分布情况
如果大部分是1的情况,则代表收敛了
"""
思考与改进
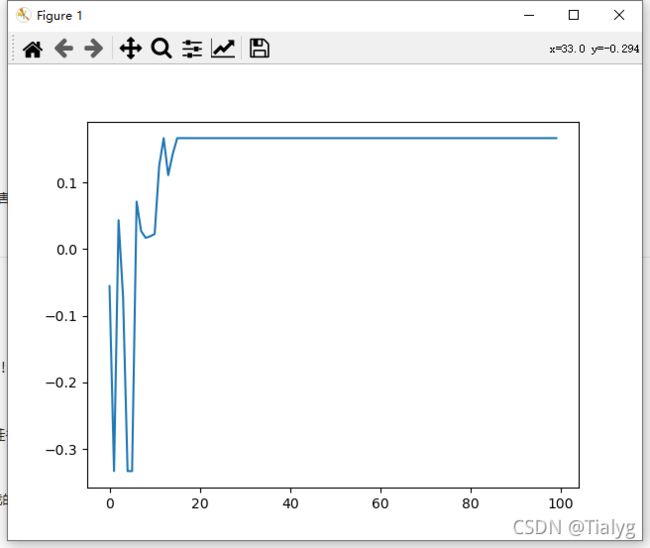
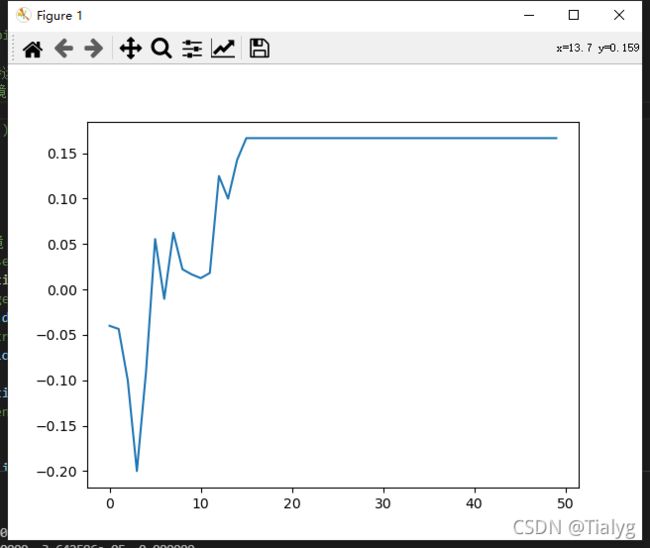
可视化结果:
迭代50次:
迭代100次: