pytorch入门(三):一些进阶部分的原理和实现
为什么pytorch是动态的
简单来说,说因为pytorch传入的参数可以动态修改,我们甚至可以在循环里修改,
其次呢就是框架可以自动求导
具体是什么原理就不过多介绍了
gpu加速
mac用户不支持gpu这个东西,拜拜hiahiahia
简述
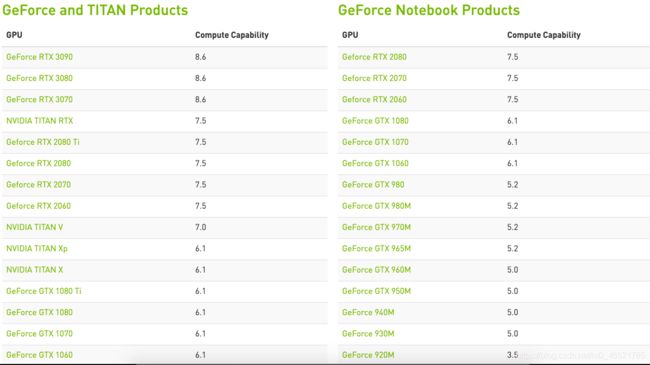
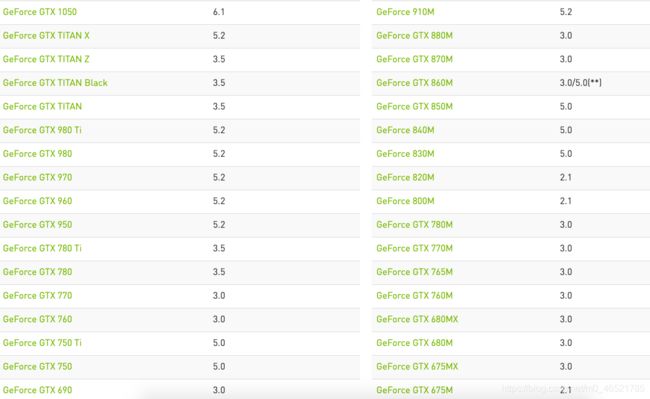
只有Nvidia厂家且支持cuda模块的gpu才可以加速(amd yes不了了)
我们可以在官网查看https://developer.nvidia.com/cuda-gpus
常见的就geforce了,部分型号截图如下
如何安装cuda
首先,去官网下载cudahttps://developer.nvidia.com/cuda-toolkit-archive然后安装就一路默认即可。
其次就是配置环境变量

在终端输入nvcc -v(大写的v)查看是否安装成功

如果没成功就是环境变量配置的不对或者没安装显卡驱动,成功了就来官网下载cudnnhttps://developer.nvidia.com/cudnn,下载的CUDNN的版本要跟CUDA版本一致
选择cuda,重新安装pytorch-gpu

运行下面代码查看是否ok了
如果没成功就继续往下看,成功了恭喜你可以转身走了
import torch
print(torch.cuda.is_available())
来官网https://www.nvidia.cn/Download/index.aspx?lang=cn安装NVIDIA控制面板,键打开NIVIDIA控制面板,选择管理3D设置,全局设置中选择高性能NVIDIA处理器即可。
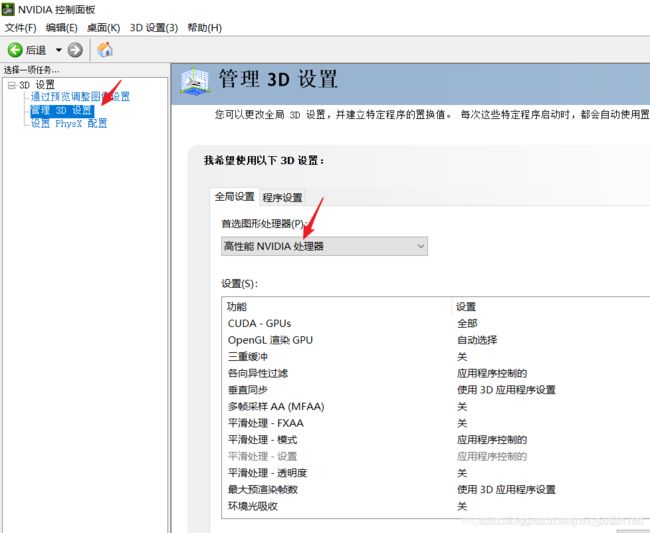
若还返回False的话 ,记得重启一下电脑,遇到问题重启一下电脑,看是否可以正常显示。
如何使用cuda加速
- 直接在数据/网络后面加上.cuda()即可把数据搬到gpu上
什么是过拟合
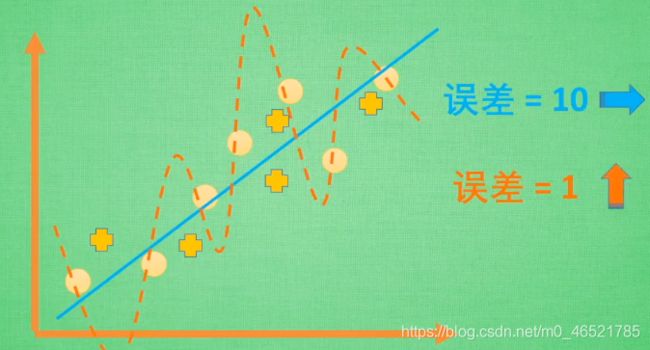
直白点说就是机器学习过于自信,已经到了自负的阶段了,表现就是在小圈子里表现的很好,大圈子里就处处碰壁
为了达到误差小的目的,机器学习可能会画出橙色的线
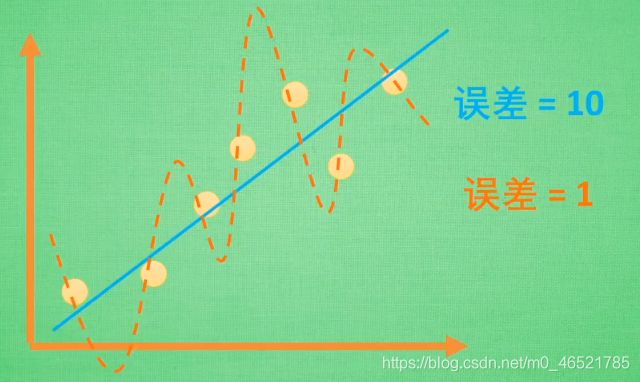
但如果实际数据是这样的,那机器学习的误差就超级大了
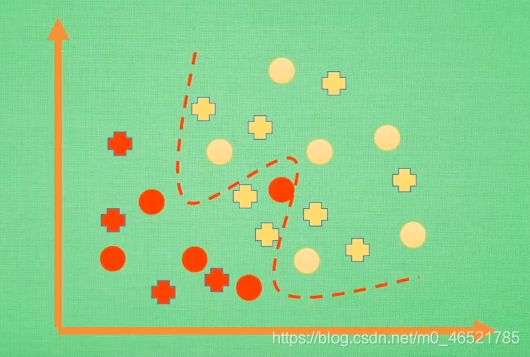
在分类问题上可能是这样的
那么如何解决过拟合现象呢?
- 增加数据量。(大多数情况下是因为数据量太少了)
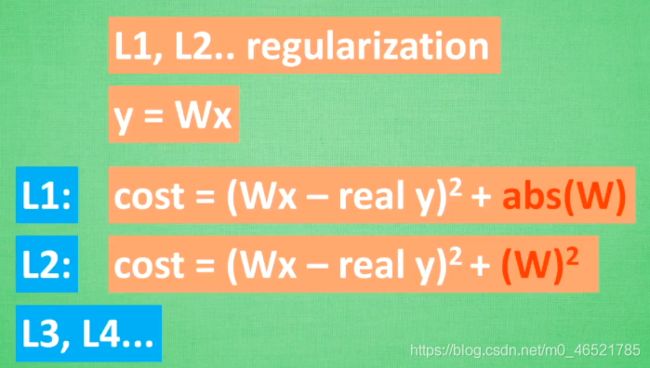
- 使用正规化,我们把数据也考虑进来,当变化很大的时候,cost也很大,相当于一种惩罚机制
- 减少神经元的数量
(正规化公式)
还有一种专门用于神经网络的正规化,我们在训练网络的时候随机忽略一些神经元让这个网络不完整,用不完整的神经元训练一次,第二次再随机忽略另外一些,这就可以让每次训练的时候,训练的结果都不会过于依赖某些特定的神经元。
机器学习是惩罚过大的w,神经网络直接是从根本上没有办法过于依赖w
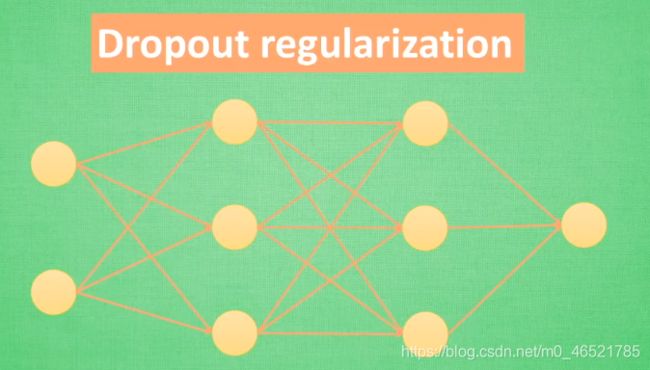

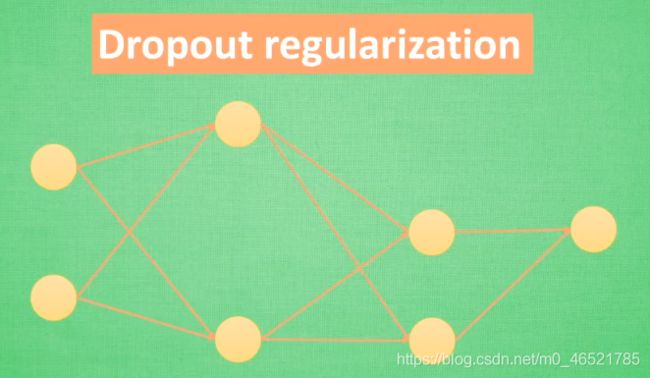

dropout处理过拟合
我们只需要加几个层就OK了,差别如图所示。
import torch
import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
N_SAMPLES = 20
N_HIDDEN = 300
# training data
x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
y = x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
# test data
test_x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
test_y = test_x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
# show data
plt.scatter(x.data.numpy(), y.data.numpy(), c='magenta', s=50, alpha=0.5, label='train')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='cyan', s=50, alpha=0.5, label='test')
plt.legend(loc='upper left')
plt.ylim((-2.5, 2.5))
plt.show()
net_overfitting = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
net_dropped = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
print(net_overfitting) # net architecture
print(net_dropped)
optimizer_ofit = torch.optim.Adam(net_overfitting.parameters(), lr=0.01)
optimizer_drop = torch.optim.Adam(net_dropped.parameters(), lr=0.01)
loss_func = torch.nn.MSELoss()
plt.ion() # something about plotting
for t in range(500):
pred_ofit = net_overfitting(x)
pred_drop = net_dropped(x)
loss_ofit = loss_func(pred_ofit, y)
loss_drop = loss_func(pred_drop, y)
optimizer_ofit.zero_grad()
optimizer_drop.zero_grad()
loss_ofit.backward()
loss_drop.backward()
optimizer_ofit.step()
optimizer_drop.step()
if t % 10 == 0:
# change to eval mode in order to fix drop out effect
net_overfitting.eval()
net_dropped.eval() # parameters for dropout differ from train mode
# plotting
plt.cla()
test_pred_ofit = net_overfitting(test_x)
test_pred_drop = net_dropped(test_x)
plt.scatter(x.data.numpy(), y.data.numpy(), c='magenta', s=50, alpha=0.3, label='train')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='cyan', s=50, alpha=0.3, label='test')
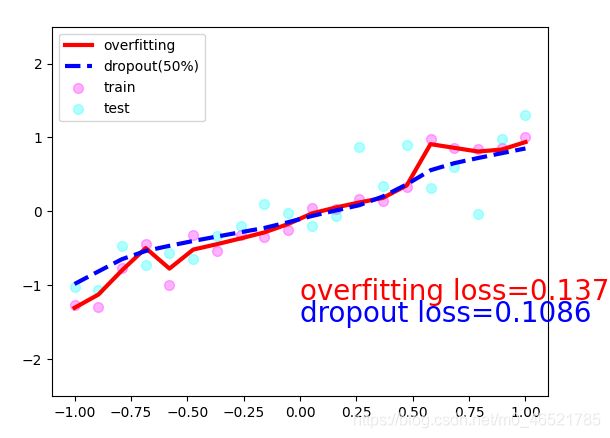
plt.plot(test_x.data.numpy(), test_pred_ofit.data.numpy(), 'r-', lw=3, label='overfitting')
plt.plot(test_x.data.numpy(), test_pred_drop.data.numpy(), 'b--', lw=3, label='dropout(50%)')
plt.text(0, -1.2, 'overfitting loss=%.4f' % loss_func(test_pred_ofit, test_y).data.numpy(), fontdict={
'size': 20, 'color': 'red'})
plt.text(0, -1.5, 'dropout loss=%.4f' % loss_func(test_pred_drop, test_y).data.numpy(), fontdict={
'size': 20, 'color': 'blue'})
plt.legend(loc='upper left'); plt.ylim((-2.5, 2.5));plt.pause(0.1)
# change back to train mode
net_overfitting.train()
net_dropped.train()
plt.ioff()
plt.show()
什么是批标准化(batch-normalization)
和普通标准化一样,批标准化就是将分散的数据统一的做法,也是优化神经网络的一种做法,可以让机器学习更容易学习到机器学习的规律
平常在数据分布或者隐藏层,激活一下,神经元不对数据大的特征敏感了,不论x再怎么大,激活到的数据增长的都很缓慢


将数据分为一块一块的,每次向前传递都会normalize一下。

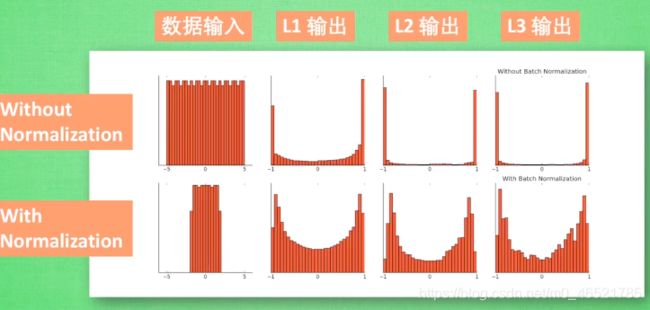
batch-normalization也可以看作成一个层面,在一层层添加神经网络的时候,先有x,再添加全连接层,再使用激活函数,再将数据传给下一个全连接层,我们把bn添加在全连接层和激励函数之间
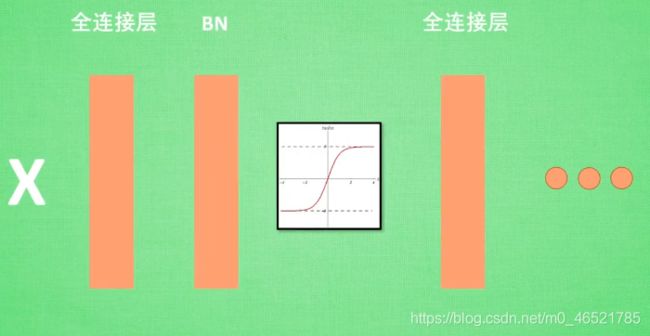
下面是使用和未使用bn的分布,以及激活之后的数据
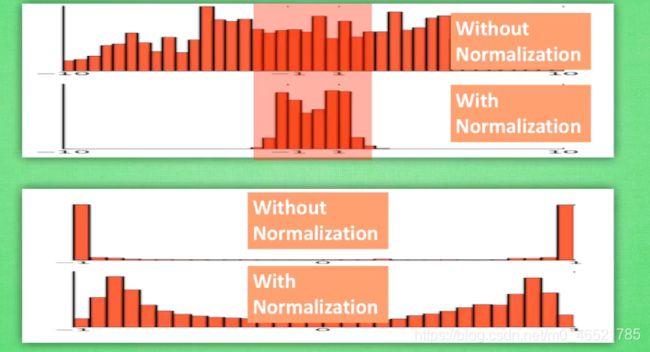
除此之外,bn不仅normalize了数据,还具有反向normalize的作用。当我们没有起到优化作用的时候,贝塔和伽马就会抵消一些normalize操作

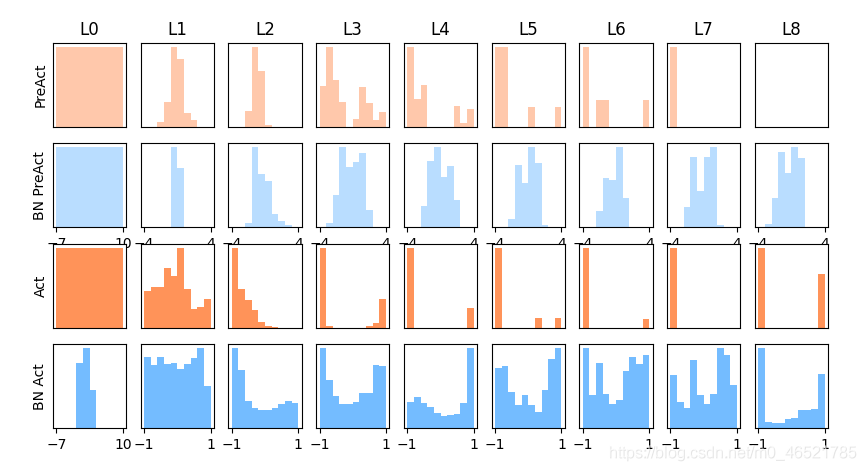
这是一张输出到最后的对比图
batch-normalization的实现
效果图,使用relu和tanh两种激活函数进行了对比
函数是nn.batchnorm1d(1,momentum=0.5),1表示有多少个输入值
import torch
from torch import nn
from torch.nn import init
import torch.utils.data as Data
import matplotlib.pyplot as plt
import numpy as np
import matplotlib;matplotlib.use('tkagg')
# torch.manual_seed(1) # reproducible
# np.random.seed(1)
# Hyper parameters
N_SAMPLES = 2000
BATCH_SIZE = 64
EPOCH = 12
LR = 0.03
N_HIDDEN = 8
ACTIVATION = torch.tanh
B_INIT = -0.2 # use a bad bias constant initializer
# training data
x = np.linspace(-7, 10, N_SAMPLES)[:, np.newaxis]
noise = np.random.normal(0, 2, x.shape)
y = np.square(x) - 5 + noise
# test data
test_x = np.linspace(-7, 10, 200)[:, np.newaxis]
noise = np.random.normal(0, 2, test_x.shape)
test_y = np.square(test_x) - 5 + noise
train_x, train_y = torch.from_numpy(x).float(), torch.from_numpy(y).float()
test_x = torch.from_numpy(test_x).float()
test_y = torch.from_numpy(test_y).float()
train_dataset = Data.TensorDataset(train_x, train_y)
train_loader = Data.DataLoader(dataset=train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,)
# show data
plt.scatter(train_x.numpy(), train_y.numpy(), c='#FF9359', s=50, alpha=0.2, label='train')
plt.legend(loc='upper left')
class Net(nn.Module):
def __init__(self, batch_normalization=False):
super(Net, self).__init__()
self.do_bn = batch_normalization
self.fcs = []
self.bns = []
self.bn_input = nn.BatchNorm1d(1, momentum=0.5) # for input data
for i in range(N_HIDDEN): # build hidden layers and BN layers
input_size = 1 if i == 0 else 10
fc = nn.Linear(input_size, 10)
setattr(self, 'fc%i' % i, fc) # IMPORTANT set layer to the Module
self._set_init(fc) # parameters initialization
self.fcs.append(fc)
if self.do_bn:
bn = nn.BatchNorm1d(10, momentum=0.5)
setattr(self, 'bn%i' % i, bn) # IMPORTANT set layer to the Module
self.bns.append(bn)
self.predict = nn.Linear(10, 1) # output layer
self._set_init(self.predict) # parameters initialization
def _set_init(self, layer):
init.normal_(layer.weight, mean=0., std=.1)
init.constant_(layer.bias, B_INIT)
def forward(self, x):
pre_activation = [x]
if self.do_bn: x = self.bn_input(x) # input batch normalization
layer_input = [x]
for i in range(N_HIDDEN):
x = self.fcs[i](x)
pre_activation.append(x)
if self.do_bn: x = self.bns[i](x) # batch normalization
x = ACTIVATION(x)
layer_input.append(x)
out = self.predict(x)
return out, layer_input, pre_activation
nets = [Net(batch_normalization=False), Net(batch_normalization=True)]
# print(*nets) # print net architecture
opts = [torch.optim.Adam(net.parameters(), lr=LR) for net in nets]
loss_func = torch.nn.MSELoss()
def plot_histogram(l_in, l_in_bn, pre_ac, pre_ac_bn):
for i, (ax_pa, ax_pa_bn, ax, ax_bn) in enumerate(zip(axs[0, :], axs[1, :], axs[2, :], axs[3, :])):
[a.clear() for a in [ax_pa, ax_pa_bn, ax, ax_bn]]
if i == 0:
p_range = (-7, 10);the_range = (-7, 10)
else:
p_range = (-4, 4);the_range = (-1, 1)
ax_pa.set_title('L' + str(i))
ax_pa.hist(pre_ac[i].data.numpy().ravel(), bins=10, range=p_range, color='#FF9359', alpha=0.5);ax_pa_bn.hist(pre_ac_bn[i].data.numpy().ravel(), bins=10, range=p_range, color='#74BCFF', alpha=0.5)
ax.hist(l_in[i].data.numpy().ravel(), bins=10, range=the_range, color='#FF9359');ax_bn.hist(l_in_bn[i].data.numpy().ravel(), bins=10, range=the_range, color='#74BCFF')
for a in [ax_pa, ax, ax_pa_bn, ax_bn]: a.set_yticks(());a.set_xticks(())
ax_pa_bn.set_xticks(p_range);ax_bn.set_xticks(the_range)
axs[0, 0].set_ylabel('PreAct');axs[1, 0].set_ylabel('BN PreAct');axs[2, 0].set_ylabel('Act');axs[3, 0].set_ylabel('BN Act')
plt.pause(0.01)
if __name__ == "__main__":
f, axs = plt.subplots(4, N_HIDDEN + 1, figsize=(10, 5))
plt.ion() # something about plotting
plt.show()
# training
losses = [[], []] # recode loss for two networks
for epoch in range(EPOCH):
print('Epoch: ', epoch)
layer_inputs, pre_acts = [], []
for net, l in zip(nets, losses):
net.eval() # set eval mode to fix moving_mean and moving_var
pred, layer_input, pre_act = net(test_x)
l.append(loss_func(pred, test_y).data.item())
layer_inputs.append(layer_input)
pre_acts.append(pre_act)
net.train() # free moving_mean and moving_var
plot_histogram(*layer_inputs, *pre_acts) # plot histogram
for step, (b_x, b_y) in enumerate(train_loader):
for net, opt in zip(nets, opts): # train for each network
pred, _, _ = net(b_x)
loss = loss_func(pred, b_y)
opt.zero_grad()
loss.backward()
opt.step() # it will also learns the parameters in Batch Normalization
plt.ioff()
# plot training loss
plt.figure(2)
plt.plot(losses[0], c='#FF9359', lw=3, label='Original')
plt.plot(losses[1], c='#74BCFF', lw=3, label='Batch Normalization')
plt.xlabel('step');plt.ylabel('test loss');plt.ylim((0, 2000));plt.legend(loc='best')
# evaluation
# set net to eval mode to freeze the parameters in batch normalization layers
[net.eval() for net in nets] # set eval mode to fix moving_mean and moving_var
preds = [net(test_x)[0] for net in nets]
plt.figure(3)
plt.plot(test_x.data.numpy(), preds[0].data.numpy(), c='#FF9359', lw=4, label='Original')
plt.plot(test_x.data.numpy(), preds[1].data.numpy(), c='#74BCFF', lw=4, label='Batch Normalization')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='r', s=50, alpha=0.2, label='train')
plt.legend(loc='best')
plt.show()
nice
yeap,基础入门部分已经完结,后面会补充概念和常见的问题嘿嘿