图像特征提取与描述_角点特征03:Fast算法+ORB算法
1 Fast算法
1.1 原理
我们前面已经介绍过几个特征检测器,它们的效果都很好,特别是SIFT和SURF算法,但是从实时处理的角度来看,效率还是太低了。为了解决这个问题,Edward Rosten和Tom Drummond在2006年提出了FAST算法,并在2010年对其进行了修正。
FAST (全称Features from accelerated segment test)是一种用于角点检测的算法,该算法的原理是取图像中检测点,以该点为圆心的周围邻域内像素点判断检测点是否为角点,通俗的讲就是若一个像素周围有一定数量的像素与该点像素值不同,则认为其为角点。
1.1.1 FAST算法的基本流程
-
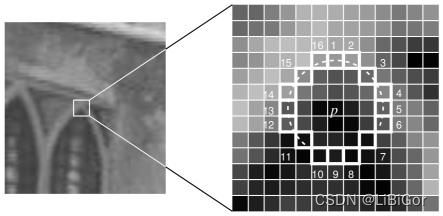
在图像中选取一个像素点 p,来判断它是不是关键点。I_pIp等于像素点 p的灰度值。
-
以r为半径画圆,覆盖p点周围的M个像素,通常情狂下,设置 r=3,则 M=16,如下图所示:
-
设置一个阈值t,如果在这 16 个像素点中存在 n 个连续像素点的灰度值都高于I_p + tIp+t,或者低于I_p - tIp−t,那么像素点 p 就被认为是一个角点。如上图中的虚线所示,n 一般取值为 12。
-
由于在检测特征点时是需要对图像中所有的像素点进行检测,然而图像中的绝大多数点都不是特征点,如果对每个像素点都进行上述的检测过程,那显然会浪费许多时间,因此采用一种进行非特征点判别的方法:首先对候选点的周围每个 90 度的点:1,9,5,13 进行测试(先测试 1 和 19, 如果它们符合阈值要求再测试 5 和 13)。如果 p 是角点,那么这四个点中至少有 3 个要符合阈值要求,否则直接剔除。对保留下来的点再继续进行测试(是否有 12 的点符合阈值要求)。
虽然这个检测器的效率很高,但它有以下几条缺点:
- 获得的候选点比较多
- 特征点的选取不是最优的,因为它的效果取决与要解决的问题和角点的分布情况。
- 进行非特征点判别时大量的点被丢弃
- 检测到的很多特征点都是相邻的
前 3 个问题可以通过机器学习的方法解决,最后一个问题可以使用非最大值抑制的方法解决。
1.1.2机器学习的角点检测器
-
选择一组训练图片(最好是跟最后应用相关的图片)
-
使用 FAST 算法找出每幅图像的特征点,对图像中的每一个特征点,将其周围的 16 个像素存储构成一个向量P。

-
每一个特征点的 16 像素点都属于下列三类中的一种
-
根据这些像素点的分类,特征向量 P 也被分为 3 个子集:Pd ,Ps ,Pb,
-
定义一个新的布尔变量Kp,如果 p 是角点就设置为 Ture,如果不是就设置为 False。
-
利用特征值向量p,目标值是$K_p$,训练ID3树(决策树分类器)。
-
将构建好的决策树运用于其他图像的快速的检测。
1.1.3 非极大值抑制
在筛选出来的候选角点中有很多是紧挨在一起的,需要通过非极大值抑制来消除这种影响。
为所有的候选角点都确定一个打分函数V , V的值可这样计算:先分别计算Ip与圆上16个点的像素值差值,取绝对值,再将这16个绝对值相加,就得到了V的值
最后比较毗邻候选角点的 V 值,把V值较小的候选角点pass掉。
FAST算法的思想与我们对角点的直观认识非常接近,化繁为简。FAST算法比其它角点的检测算法快,但是在噪声较高时不够稳定,这需要设置合适的阈值。
1.2 实现
OpenCV中的FAST检测算法是用传统方法实现的,
1.实例化fast
fast = =cv.FastFeatureDetector_create( threshold, nonmaxSuppression)
参数:
- threshold:阈值t,有默认值10
- nonmaxSuppression:是否进行非极大值抑制,默认值True
返回:
- Fast:创建的FastFeatureDetector对象
2.利用fast.detect检测关键点,没有对应的关键点描述
kp = fast.detect(grayImg, None)
参数:
- gray: 进行关键点检测的图像,注意是灰度图像
返回:
- kp: 关键点信息,包括位置,尺度,方向信息
3.将关键点检测结果绘制在图像上,与在sift中是一样的
cv.drawKeypoints(image, keypoints, outputimage, color, flags)
示例:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/tv.jpg')
# 2 Fast角点检测
# 2.1 创建一个Fast对象,传入阈值,注意:可以处理彩色空间图像
fast = cv.FastFeatureDetector_create(threshold=30)
# 2.2 检测图像上的关键点
kp = fast.detect(img,None)
# 2.3 在图像上绘制关键点
img2 = cv.drawKeypoints(img, kp, None, color=(0,0,255))
# 2.4 输出默认参数
print( "Threshold: {}".format(fast.getThreshold()) )
print( "nonmaxSuppression:{}".format(fast.getNonmaxSuppression()) )
print( "neighborhood: {}".format(fast.getType()) )
print( "Total Keypoints with nonmaxSuppression: {}".format(len(kp)) )
# 2.5 关闭非极大值抑制
fast.setNonmaxSuppression(0)
kp = fast.detect(img,None)
print( "Total Keypoints without nonmaxSuppression: {}".format(len(kp)) )
# 2.6 绘制为进行非极大值抑制的结果
img3 = cv.drawKeypoints(img, kp, None, color=(0,0,255))
# 3 绘制图像
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)
axes[0].imshow(img2[:,:,::-1])
axes[0].set_title("加入非极大值抑制")
axes[1].imshow(img3[:,:,::-1])
axes[1].set_title("未加入非极大值抑制")
plt.show()
结果:
2 ORB 算法
2.1 原理
SIFT和SURF算法是受专利保护的,在使用他们时我们是要付费的,但是ORB(Oriented Fast and Rotated Brief)不需要,它可以用来对图像中的关键点快速创建特征向量,并用这些特征向量来识别图像中的对象。
2.1.1 ORB算法流程
ORB算法结合了Fast和Brief算法,提出了构造金字塔,为Fast特征点添加了方向,从而使得关键点具有了尺度不变性和旋转不变性。具体流程描述如下:
- 构造尺度金字塔,金字塔共有n层,与SIFT不同的是,每一层仅有一幅图像。第s层的尺度为:

σ0是初始尺度,默认为1.2,原图在第0层。

第s层图像的大小:

-
在不同的尺度上利用Fast算法检测特征点,采用Harris角点响应函数,根据角点的响应值排序,选取前N个特征点,作为本尺度的特征点。
-
计算特征点的主方向,计算以特征点为圆心半径为r的圆形邻域内的灰度质心位置,将从特征点位置到质心位置的方向做特征点的主方向。

- 为了解决旋转不变性,将特征点的邻域旋转到主方向上利用Brief算法构建特征描述符,至此就得到了ORB的特征描述向量。
2.1.2 BRIEF算法
BRIEF是一种特征描述子提取算法,并非特征点的提取算法,一种生成二值化描述子的算法,不提取代价低,匹配只需要使用简单的汉明距离(Hamming Distance)利用比特之间的异或操作就可以完成。因此,时间代价低,空间代价低,效果还挺好是最大的优点。
算法的步骤介绍如下:
-
图像滤波:原始图像中存在噪声时,会对结果产生影响,所以需要对图像进行滤波,去除部分噪声。
-
选取点对:以特征点为中心,取S*S的邻域窗口,在窗口内随机选取N组点对,一般N=128,256,512,默认是256,关于如何选取随机点对,提供了五种形式,结果如下图所示:
-
x,y方向平均分布采样
-
x,y均服从Gauss(0,S^2/25)各向同性采样
-
x服从Gauss(0,S^2/25),y服从Gauss(0,S^2/100)采样
-
x,y从网格中随机获取
-
x一直在(0,0),y从网格中随机选取

图中一条线段的两个端点就是一组点对,其中第二种方法的结果比较好。
-
-
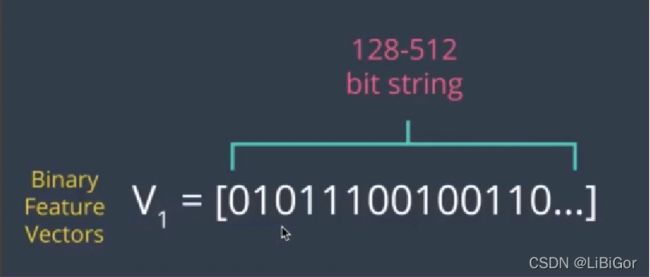
构建描述符:假设x,y是某个点对的两个端点,p(x),p(y)是两点对应的像素值,则有:
对每一个点对都进行上述的二进制赋值,形成BRIEF的关键点的描述特征向量,该向量一般为 128-512 位的字符串,其中仅包含 1 和 0,如下图所示:
2.2 实现
在OPenCV中实现ORB算法,使用的是:
1.实例化ORB
orb = cv.xfeatures2d.orb_create(nfeatures)
参数:
- nfeatures: 特征点的最大数量
2.利用orb.detectAndCompute()检测关键点并计算
kp,des = orb.detectAndCompute(gray,None)
参数:
- gray: 进行关键点检测的图像,注意是灰度图像
返回:
- kp: 关键点信息,包括位置,尺度,方向信息
- des: 关键点描述符,每个关键点BRIEF特征向量,二进制字符串,
3.将关键点检测结果绘制在图像上
cv.drawKeypoints(image, keypoints, outputimage, color, flags)
示例:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/tv.jpg')
# 2 ORB角点检测
# 2.1 实例化ORB对象
orb = cv.ORB_create(nfeatures=500)
# 2.2 检测关键点,并计算特征描述符
kp,des = orb.detectAndCompute(img,None)
print(des.shape)
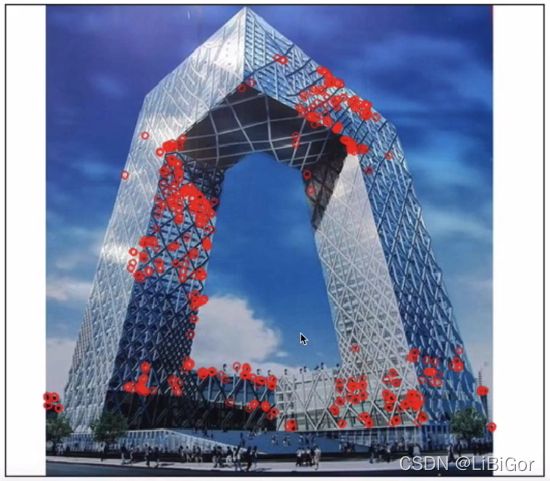
# 3 将关键点绘制在图像上
img2 = cv.drawKeypoints(img, kp, None, color=(0,0,255), flags=0)
# 4. 绘制图像
plt.figure(figsize=(10,8),dpi=100)
plt.imshow(img2[:,:,::-1])
plt.xticks([]), plt.yticks([])
plt.show()
总结
-
Fast算法
原理:若一个像素周围有一定数量的像素与该点像素值不同,则认为其为角点
API: cv.FastFeatureDetector_create()
-
ORB算法
原理:是FAST算法和BRIEF算法的结合
API:cv.ORB_create()