强化学习基础篇(二十)k-bandit问题
最近回顾继续回顾了一遍第二版的《Reinforcement Learning: An Introduction》,发现有必要对那些基本的实验进行复现回顾,本文先针对多臂Bandit问题进行复现。
1、k-bandit问题设定
k-bandit问题考虑的是如下的学习问题:你要重复地在k个选项或者动作中进行选择。每次做出选择后,都会得到一定数值的收益,收益由你选择的动作决定的平稳概率分布产生。目标是在某一段时间内最大化总收益的期望。
k-bandit问题是源于老虎机(或者叫单臂Bandit),不同之处在于它有k个控制杆,而不是老虎机的一个控制杆。
在k-bandit的问题中,k个动作中的每一个在被选择时都有一个期望或者平均收益,我们称之为“价值”。我们将在时刻选择的动作记为,并将对应的收益记为。任一动作对应的价值记为,即为给定动作时收益的期望:
如果我们知道了每个动作的价值,那么k-bandit问题就很简单,只需要每次选择价值最高的动作。但是我们不知道每个动作的价值的情况下,就只能对其进行归集。所以我们将对动作在时刻时的价值估计记为,其估计的目标是希望他接近于。
Exploration与Exploitation:
既然我们会对动作的价值进行估计,那么在任一时刻会至少有一个动作的估计价值是最高的。我们将这些对应最高估计值的动作称之为贪心(greedy)动作。我们持续选择greedy动作,则称为Exploitation。
如果我们一直进行greedy选择动作,有可能陷入局部最优,为了能够获得全局最优。我们还需要在任务运行中去探索那些我们未知价值的动作,这就称为Exploration。
如果我们只是以的概率去探索未知的动作,而以的概率持续进行greedy选择,那么这种规则称为方法。
2、k-bandit建模
为了大致评估贪心方法和方法,我们在一个10臂Bandit问题上进行相应的验证。
首先我们导入会用到的库函数。
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
from tqdm import trange
from pylab import mpl
import seaborn as sns
np.random.seed(sum(map(ord, "aesthetics")))
mpl.rcParams['font.sans-serif'] = ['SimHei']
接下来我们构建k-臂Bandit模型。
环境设置
在用代码实现Bandit时,我们需要考虑多方因素,下面先列出一个bandit初始化时需要考虑到的各种参数:
-
k_arm:
Bandit的臂数,其决定了可选动作空间的大小,例如当k_arm=10时意味着:每个时刻有10个可选动作,其分别决定着不同的收益。
-
epsilon:
在每次进行动作选取时,一个朴素的思想就是每次都选带来最大收益的动作,即,我们称之为“贪心”,贪心有利于exploitation但不利于exploration,为了平衡开发和试探,可采用方法进行动作的选择,即在每个时刻,使用的概率选取最优动作,使用概率选取随机动作。
-
initial:
在对动作价值估计之前,我们通常为每个动作的价值)初始化为0。使用乐观初始值(即高于真实价值的均值)估计会去鼓励bandit进行explore,因为无论哪种动作被选取,其带来的收益均要小于乐观初始值,因此bandit会转而采取另一种动作,从而使每一个动作在收敛之前都被尝试很多次。
-
step_size:
步长参数,有固定步长和非固定步长两种类别可选。用于动作估计值的更新:
-
sample_averages:
用非固定步长作为步长参数,用于动作估计值的更新:
-
UCB_param:
UCB即对应置信度上界,即动作的选取从改变为:
其中UCB_param即动作选取公式中的c,可解释为:平方根项是对a动作值估计的不确定性或方差的度量,参数c决定了置信水平,但随着a选取次数的增多,其不确定性会逐渐减少。
-
gradient:
对应梯度Bandit算法,算法中每个动作被选取的概率为softmax分布所确定:
其中代表时刻t动作被选择的概率,而则代表动作的偏好函数。 -
gradient_baseline:在梯度Bandit算法中,待学习的变量为偏好函数,可以把其理解为动作的收益,但其本身不重要,重要的是一个动作对另一个动作的相对偏好。偏好函数的更新如下:
当使用baseline时,baseline被赋值为到t为止的平均收益;不使用时则等于0。使用基准项可以实现缩减方差的作用,使算法快速收敛。
class Bandit:
def __init__(self, k_arm=10, epsilon=0., initial=0., step_size=0.1, sample_averages=False, UCB_param=None,
gradient=False, gradient_baseline=False, true_reward=0.):
self.k = k_arm # 设定Bandit臂数
self.step_size = step_size # 设定更新步长
self.sample_averages = sample_averages # bool变量,表示是否使用简单增量式算法
self.indices = np.arange(self.k) # 创建动作索引(和Bandit臂数长度相同)
self.time = 0 # 计算所有选取动作的数量,为UCB做准备
self.UCB_param = UCB_param # 如果设定了UCB的参数c,就会在下面使用UCB算法
self.gradient = gradient # bool变量,表示是否使用梯度Bandit算法
self.gradient_baseline = gradient_baseline # 设定梯度Bandit算法中的基准项(baseline),通常都用时刻t内的平均收益表示
self.average_reward = 0 # 用于存储baseline所需的平均收益
self.true_reward = true_reward # 存储一个Bandit的真实收益均值,为下面制作一个Bandit的真实价值函数做准备
self.epsilon = epsilon # 设定epsilon-贪婪算法的参数
self.initial = initial # 设定初始价值估计,如果调高就是乐观初始值
状态重置函数定义
reset(self)函数主要用于在episode结束后重置状态。
这次实验中我们会考虑在k-bandit中,动作的真实价值是从一个均值为0,方差为1的状态分布中进行选择的。
我把每一步的具体含义也打在代码中了,值得注意的是其中true_reward的用意,我是根据上下文才推测出来的,由于之后要对比使用和不使用baseline的训练效果,而真实价值是一个标准正态分布,这就导致它回报的平均值会接近0,即baseline接近0,这和不使用baseline的效果是类似的,所以在对比baseline效果的实验中我们通过true_reward把真实价值垫高。
# 初始化训练状态,设定真实收益和最佳行动状态
def reset(self):
# #设定真实价值函数,在一个标准高斯分布上抬高一个外部设定的true_reward,true_reward设置为非0数字以和不使用baseline的方法相区分
self.q_true = np.random.randn(self.k) + self.true_reward
# 设定初始估计值,在全0的基础上用initial垫高,表现乐观初始值
self.q_estimation = np.zeros(self.k) + self.initial
# 计算每个动作被选取的数量,为UCB做准备
self.action_count = np.zeros(self.k)
# 根据真实价值函数选择最佳策略,为之后做准备
self.best_action = np.argmax(self.q_true)
# 设定时间步t为0
self.time = 0
动作选择函数定义
其中考虑了如下几种动作选择情况:
- 动作选择:
- 置信度上界的动作选择:
- 基于梯度的动作选择:
# 动作选取函数
def act(self):
# epsilon概率随机选取一个动作下标
if np.random.rand() < self.epsilon:
return np.random.choice(self.indices)
# 基于置信度上界的动作选取
if self.UCB_param is not None:
# 按照公司计算UCB估计值
UCB_estimation = self.q_estimation + \
self.UCB_param * np.sqrt(np.log(self.time + 1) / (self.action_count + 1e-5))
# 选择不同动作导致的预测值中最大的
q_best = np.max(UCB_estimation)
# 返回基于UCB的动作选择下值最大的动作
return np.random.choice(np.where(UCB_estimation == q_best)[0])
# 基于梯度Bandit算法
if self.gradient:
exp_est = np.exp(self.q_estimation)
self.action_prob = exp_est / np.sum(exp_est)
return np.random.choice(self.indices, p=self.action_prob)
# 在未使用UCB与基于梯度的方法后,继续返回epsilon概率随机选择的greedy动作
q_best = np.max(self.q_estimation)
return np.random.choice(np.where(self.q_estimation == q_best)[0])
价值更新
由bandit建模部分可以得知,在选取完动作后,与动作价值更新有关的参数为sample_averages、gradient、gradient_baseline,
step函数的任务是接受agent动作,根据agent选择的方法更新价值函数估计,并返回reward以进行平均reward的计算。
给出代码如下:
# take an action, update estimation for this action
# 选择动作并进行价值更新
def step(self, action):
# generate the reward under N(real reward, 1)
# 按照之前产生的真实价值作为均值,产生一个遵从正态分布的随机奖励
reward = np.random.randn() + self.q_true[action]
# 执行动作后时间步加一
self.time += 1
## 动作选择数量计数
self.action_count[action] += 1
# 计算平均回报(return),为baseline做好准备
self.average_reward += (reward - self.average_reward) / self.time
if self.sample_averages:
# update estimation using sample averages
# 增量式实现(非固定步长1/n)
# Qn+1 = Qn + [Rn-Qn]/n
self.q_estimation[action] += (reward - self.q_estimation[action]) / self.action_count[action]
# 使用梯度Bandit
elif self.gradient:
# 将k臂做onehot编码
one_hot = np.zeros(self.k)
# 将选择的动作位置置为1.
one_hot[action] = 1
# 在梯度Bandit上使用baseline
if self.gradient_baseline:
# 平均收益作为baseline
baseline = self.average_reward
else:
#不使用baseline的情况
baseline = 0
# 梯度式偏好函数更新:
# 对action At:Ht+1(At) = Ht(At) + å(Rt-R_avg)(1-π(At))
self.q_estimation += self.step_size * (reward - baseline) * (one_hot - self.action_prob)
else:
# update estimation with constant step size
# 如过上面两种方法都没有选取,就选用常数步长更新
# Qn+1 = Qn + å(Rn-Qn)
self.q_estimation[action] += self.step_size * (reward - self.q_estimation[action])
return reward
3、辅助函数
simulate函数用来进行循环实验并返回不同策略指导下Bandit的平均回报和做出最佳选择的概率。
simulate由三个循环组成:
第一个循环是有对不同的实验组进行循环。
第二个循环是对实验次数进行循环,每次实验有着相同超参数但是不同奖励分布。
第三个循环是对每个Bandit进行预定时间步进行实验。在其中进行实际的动作与回报计算。最后返回每个Bandit选到最佳动作的概率和每个Bandit的平均回报,即选择不同计算策略和不同参数Bandit的表现,方便后面画图对比。
def simulate(runs, time, bandits):
# 这里定义结果存储,按照实验的对照组数量,每个组实验的次数,以及每次实验的时间步数量进行存储
rewards = np.zeros((len(bandits), runs, time))
# 计算选择到最佳动作的数量,为算法对比做准备
best_action_counts = np.zeros(rewards.shape)
# 在每个实验组中循环
for i, bandit in enumerate(bandits):
# 轮询实验次数
for r in trange(runs):
# 重置环境
bandit.reset()
# 在实验的时间步内循环
for t in range(time):
# 进行动作选择
action = bandit.act()
# 在环境中执行动作后,获取回报
reward = bandit.step(action)
# 结果存储
rewards[i, r, t] = reward
# 统计在哪些时刻agent选择了最优的动作
if action == bandit.best_action:
best_action_counts[i, r, t] = 1
# 计算每个Bandit平均选到最佳动作的概率
mean_best_action_counts = best_action_counts.mean(axis=1)
# 计算每个Bandit收到的平均回报
mean_rewards = rewards.mean(axis=1)
return mean_best_action_counts, mean_rewards
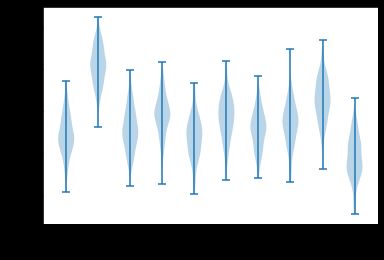
4、测试平台可视化
该次实验的10臂多搏击问题,具有10个动作,每个动作的真实值分别从一个零均值单位方差的正态分布中生成,然后实际的收益从均值为且为单位方差的正态分布中生成,下面代码可视化该过程的小提琴图(Violin Plot) 。
def figure_2_1():
plt.violinplot(dataset=np.random.randn(200, 10) + np.random.randn(10))
plt.xlabel("动作")
plt.ylabel("收益分布")
plt.show()
figure_2_1()
当然还可以用seaborn画出来:
dataset=np.random.randn(200, 10) + np.random.randn(10)
f, ax = plt.subplots()
sns.violinplot(data=dataset)
sns.despine(offset=10, trim=True)

5、贪心算法与算法比较
下面我们会比较贪心算法(),的以及的这三种方法。这里对2000次不同的10臂Bandit验收进行了平均,所有的方法都采用采样平均作为对动作价值的估计。
具体代码如下:
def figure_2_2(runs=2000, time=1000):
# 实验的三种epsilon场景
epsilons = [0, 0.1, 0.01]
# 这里用了一个list存储了三个相同参数的Bandit(除了epsilon),方便下面迭代对比
bandits = [Bandit(epsilon=eps, sample_averages=True) for eps in epsilons]
best_action_counts, rewards = simulate(runs, time, bandits)
plt.figure(figsize=(10, 20))
plt.subplot(2, 1, 1)
for eps, rewards in zip(epsilons, rewards):
plt.plot(rewards, label='epsilon = %.02f' % (eps))
plt.xlabel('steps')
plt.ylabel('average reward')
plt.legend()
plt.subplot(2, 1, 2)
for eps, counts in zip(epsilons, best_action_counts):
plt.plot(counts, label='epsilon = %.02f' % (eps))
plt.xlabel('steps')
plt.ylabel('% optimal action')
plt.legend()
plt.show()
figure_2_2()
实验结果如下:

这里所有方法都用采样平均策略来形成对动作价值的估计。上部的图显示了期望的收益随着经验的增长而增长。贪心方法在最初增长得略微快一些,但是随后稳定在一个较低的水平。相对于在这个测试平台上最好的可能收益1.55,这个方法每时刻只获得了大约1的收益。从长远来看,贪心的方法表现明显更糟,因为它经常陷入执行次优的动作的怪圈。下部的图显示贪心方法只在大约三分之一的任务中找到最优的动作。在另外三分之二的动作中,最初采样得到的动作非常不好,贪心方法无法跳出来找到最优的动作。方法最终表现更好,因为它们持续地试探并且提升找到最优动作的机会。的方法试探得更多,通常更早发现最优的动作,但是在每时刻选择这个最优动作的概率却永远不会超过91%(因为要在的情况下试探)。的方法改善得更慢,但是在图中的两种测度下,最终的性能表现都会比的方法更好。为了充分利用高和低的c值的优势,随着时刻的推移来逐步减小也是可以的。
6. 乐观初始值测试
该次实验会比较初始值设为与初始值为两种情况的对比。
def figure_2_3(runs=2000, time=1000):
bandits = []
# 实验对照组
bandits.append(Bandit(epsilon=0, initial=5, step_size=0.1))
bandits.append(Bandit(epsilon=0.1, initial=0, step_size=0.1))
best_action_counts, _ = simulate(runs, time, bandits)
plt.plot(best_action_counts[0], label='epsilon = 0, q = 5')
plt.plot(best_action_counts[1], label='epsilon = 0.1, q = 0')
plt.xlabel('Steps')
plt.ylabel('% optimal action')
plt.legend()
plt.show()
figure_2_3()
实验结果如下图所示,刚开始乐观初始值表现很差,这是因为他需要更多的试探次数,随着时间的推移,实验次数减少,乐观初始值表现得更好。

7、UCB测试
下面将比较UCB算法在10臂测试平台上的平均表现
def figure_2_4(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(epsilon=0, UCB_param=2, sample_averages=True))
bandits.append(Bandit(epsilon=0.1, sample_averages=True))
_, average_rewards = simulate(runs, time, bandits)
plt.plot(average_rewards[0], label='UCB c = 2')
plt.plot(average_rewards[1], label='epsilon greedy epsilon = 0.1')
plt.xlabel('Steps')
plt.ylabel('Average reward')
plt.legend()
plt.show()
figure_2_4()
实验结果如下,除了刚开始的k步随机选择让位尝试过的动作外,在一般情况下,UCB算法会比算法表现更好。

8、梯度Bandit算法测试
下面会比较四种情况的算法效果:
- 包含baseline,并且
- 包含baseline,并且
- 不包含baseline,并且
- 不包含baseline,并且
def figure_2_5(runs=2000, time=1000):
bandits = []
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.1, gradient_baseline=False, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=True, true_reward=4))
bandits.append(Bandit(gradient=True, step_size=0.4, gradient_baseline=False, true_reward=4))
best_action_counts, _ = simulate(runs, time, bandits)
labels = ['alpha = 0.1, with baseline',
'alpha = 0.1, without baseline',
'alpha = 0.4, with baseline',
'alpha = 0.4, without baseline']
for i in range(len(bandits)):
plt.plot(best_action_counts[i], label=labels[i])
plt.xlabel('Steps')
plt.ylabel('% Optimal action')
plt.legend()
plt.show()
figure_2_5()
实验结果如下,其中可以看到包含baseline的算法表现更好。

9、多算法融合比较
最后将比较四种算法的融合比较,包括:
- 算法
- 乐观初始值算法
- UCB算法
- 梯度Bandit算法
对比过程代码如下:
def figure_2_6(runs=2000, time=1000):
labels = ['epsilon-greedy', 'gradient bandit',
'UCB', 'optimistic initialization']
generators = [lambda epsilon: Bandit(epsilon=epsilon, sample_averages=True),
lambda alpha: Bandit(gradient=True, step_size=alpha, gradient_baseline=True),
lambda coef: Bandit(epsilon=0, UCB_param=coef, sample_averages=True),
lambda initial: Bandit(epsilon=0, initial=initial, step_size=0.1)]
parameters = [np.arange(-7, -1, dtype=np.float),
np.arange(-5, 2, dtype=np.float),
np.arange(-4, 3, dtype=np.float),
np.arange(-2, 3, dtype=np.float)]
bandits = []
for generator, parameter in zip(generators, parameters):
for param in parameter:
bandits.append(generator(pow(2, param)))
_, average_rewards = simulate(runs, time, bandits)
rewards = np.mean(average_rewards, axis=1)
i = 0
for label, parameter in zip(labels, parameters):
l = len(parameter)
plt.plot(parameter, rewards[i:i+l], label=label)
i += l
plt.xlabel('Parameter(2^x)')
plt.ylabel('Average reward')
plt.legend()
plt.show()
figure_2_6()
对比结果如下,这张图分别给出了每一种算法及参数随时间推移的学习曲线。这个曲线中展示了每种算法和参数超过1000步的平均收益值,这个值与学习曲线下的面积成正比。这种图叫参数研究图,每个算法的性能都呈现为倒U形,所有算法在其参数的中间值表现最好,参数既不能太大也不能太小。
在评估一种方法时,我们不仅要关注它在最佳参数设置上的表现,还要注意它对参数值的敏感性。所有这些算法都是相当不敏感的,它们在一系列的参数值上表现得很好,这些参数值的大小是一个数量级的。总的来说,在这个问题上,UCB似乎表现最好。
