k8s的核心概念
一. Pod
pod,中文翻译过来叫豆荚,如下图。我们都知道豆荚,一个豆荚里面有很多豆子。豆荚就可以理解为pod,一个个的豆子就可以理解为容器。pod和容器的关系是一个pod里面可以有一个或者多个容器。Pod是k8s部署的最小单位。
那么pod中容器和容器之间有什么关系呢?
当server api将指令下发给kubelet的时候,kubelet会创建第一个容器,不管创建pod的目标是什么,第一个容器总是不变的,他就是pause。pause是第一个被创建的容器,它的作用有两个:
-
初始化网络栈
创建对应的veth,网络命名空间,网桥,这些都是初始化网络栈的时候完成的。
-
挂载网络卷
当我们需要 pod有一定的存储能力,这时就需要给pod挂载到对应的卷,这个卷是被谁挂载的呢?不是被应用容器挂载的,而是被pause挂载的。
初始化好pause,后续可以在pod中安装一个或多个容器。这些容器跟pause共享网络栈,共享数据卷。
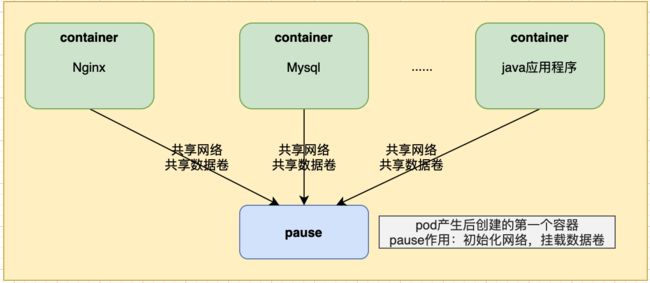
比如,我们在pod中添加了3个容器,nginx,mysql,java应用程序。还可以更多,但最少要有一个container。这些容器共享pause的网络和数据卷。所以,在pod中的容器,容器名、端口号都不能重复,否则会报错。
提示:通常容器关联比较大的应用,放在一个pod中,在同一个pod中可以使用localhost进行访问
1.Pod的类型
1) 自主式Pod
自主式Pod是不被控制器管理的Pod. 这种Pod死亡以后, 不会被重新启动. 这个Pod死了以后, 副本数就达不到期望值了, 也不会有人去创建一个新的Pod来达到副本数的期望值.
在传统情况下, 我们运行一个容器, 每一个容器都是独立存在的, 每个容器都有自己的ip地址, 每个容器都有自己的挂载卷. 但在k8s移植的时候, 就不太容易了. 我们把一个没有在容器里运行的环境转移到或迁移到k8s的环境里, 就比较难迁移.比如:LAMP, 那么A和php之间有联系,我们把A和php分开了, 他俩个是不同的地址, 还要去配置反向代理, 比较费劲.
说的是什么意思呢? 有些组件应该在一起, 并且能互相见面, 也就是通过localhost能访问到. 但是, 使用标准的容器, 你没办法这样做, 除非你把两个进程封装在一个容器内部. K8S给我们建立了一个Pod, Pod是怎样实现的呢?
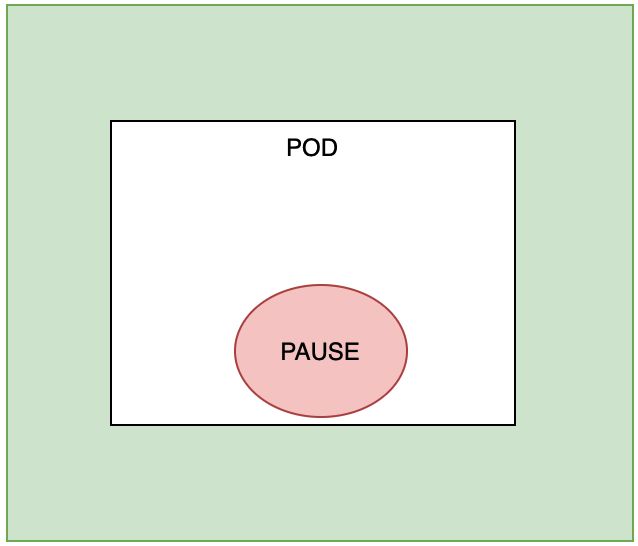
首先, 要定义一个Pod, 他会先启动第一个容器, 需要注意的是, 只要运行了Pod, 这个容器就会被启动. 这个容器叫pause
然后, 在Pod里定义了两个容器, 这两个容器不是固定的,几个都可以,至少是一个。 然后这两个容器会共用PAUSE的网络栈和存储卷.
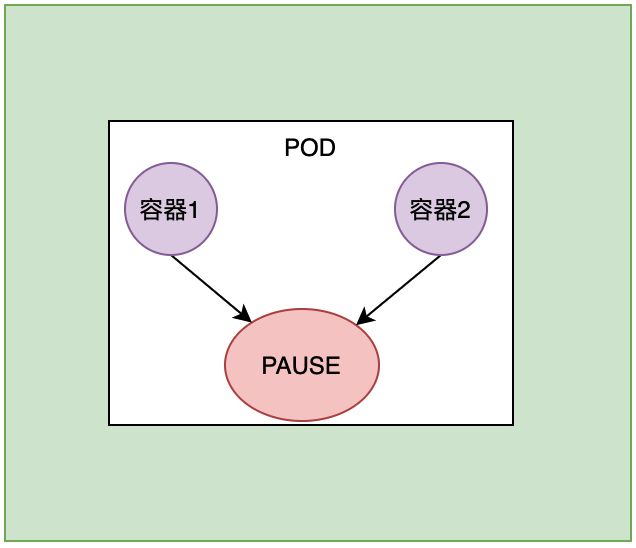
也就是说, 这两个容器没有自己独立的ip地址和存储卷, 或者说, 他们有的是PAUSE或者pod的ip地址. 这两个容器他们尾根隔离, 但是进程不隔离. 也就是说, 如果容器1运行的是php, 容器2运行的是nginx, nginx想要反向代理访问php, 只需要要写localhost:9000即可. 不需要写IP地址+端口映射. 能够直接使用localhost的原因是这两个容器共享的是PAUSE的网络栈.
这样就说明了, 在同一个Pod里, 容器之间的端口不能冲突. 一个pod里不能有两个容器的端口都是80

下面一个要说明的是: 共享存储. 这里两个容器除了共享网络, 同时也共享存储卷.
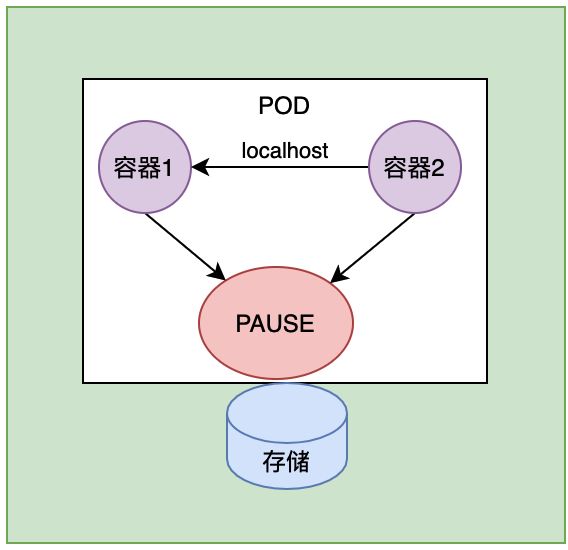
假设PAUSE挂载了一个存储,容器1会共享PAUSE的储存卷,容器2也共享PAUSE的存储卷,也就是说一个pod中的容器共享PAUSE的存储卷
2) 控制器管理的Pod
控制器管理的Pod有三种:ReplicationController & ReplicaSet & Deployment , 这三种控制器有很多相似的地方
i.ReplicationController
ReplicationController简称rc. 它的作用是确保容器应用的副本数始终保持在用户定义的副本数, 这是用户的期望。即如果有容器异常退出, 会自动创建新的Pod来代替; 而如果异常多出来的容器也会自动回收. 在新版本的k8s中, 建议使用ReplicaSet来取代ReplicationController.
ii.ReplicaSet:
ReplicaSet简称rs. 跟ReplicationController没有本质上的区别, 除了名字不同, ReplicaSet支持集合式的selector.
这个集合式的选择器是什么呢?就是在我们创建Pod的时候, 可以给他打标签. 比如: app = http, version = v1版本等等. 我们会打一堆的标签. 当我们想删除容器的时候, 我们可以这样说: 当app=http, version = v1的时候, 执行什么操作. rs支持这种集合方案, 但是rc不支持. 所以在大型项目中, rs比rc会更简单, 更有效率. 所以, 在新版本中, 官方抛弃rc, 全部转用rs.
在小的集群下,有没有标签都没所谓,但当集群越来越大,pod越来越多的时候,标签就很有用了。我们可以通过标签定位某一个pod。
所以,rc适合小集群使用,rs适合多集群,pod量很大的时候使用。rs包含了rc的功能,所以官方都建议使用rs。
iii.Deployment:
虽然replicaSet可以独立使用, 但一般还是建议使用Deployment来自动管理ReplicaSet, 这样就无需担心跟其他机制的不兼容问题(比如ReplicaSet不支持 rolling-update滚动更新, 但Deployment支持) 。Deployment为何要和RS一起使用呢?是因为Deployment本身不能创建Pod。
滚动更新还是很有意义的, 尤其是在生成环境中
比如:我们现在有两个容器, 我们要将现在容器的版本从v1版本升级到v2版本. 这时候, 怎么办呢? 我们可以进行滚动更新.
首先, 先生成一个新的pod. 然删除一个旧的pod, 如下如所示. 先生成一个v2版本的pod, 然后删除一个v1版本的pod .再把v2版本的pod挂载到集群上,然后以此类推,所有服务器以此替换。最后,所有服务器就都是v2版本的,这就是滚动更新.

那么, Deployment是如何管理rs并滚动更新的呢?
- 首次部署的时候,要做那些事呢?
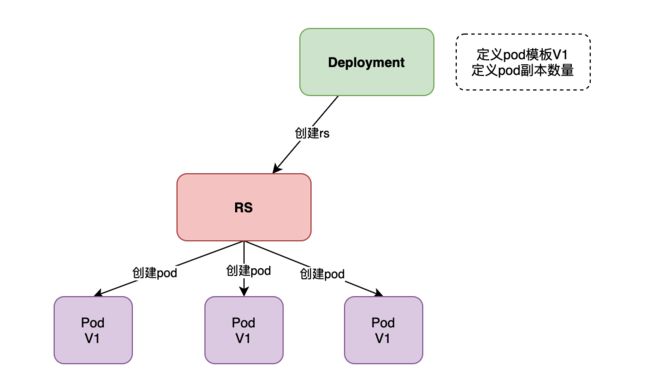
第一步:会创建一个Deployment控制器,在Deployment控制器中定义了pod的模板和副本数量。
第二步,Deployment会主动创建一个RS。也就是说rs不是我们自己定义的, 是Deployment自动生成的. RS会创建多个pod
第三步,RS主动帮我们创建Pod,并维持pod副本数的稳定。
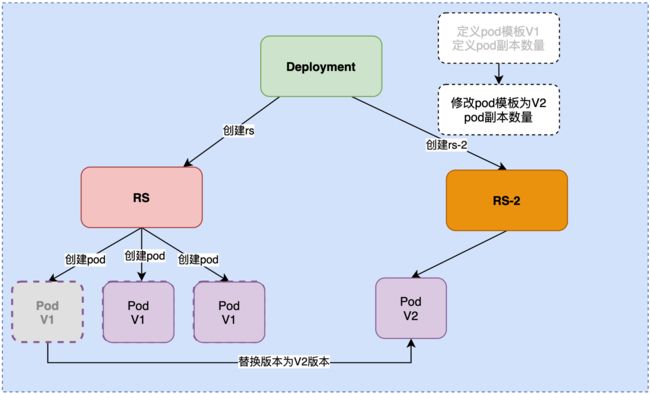
Deployment定义出来以后, 他会定义一个rs, RS会创建多个pod. 如下图
- 当需要更新版本的时候. 怎么做呢?
官方开发出了v2版本,这时我们要进行滚动更新了。如何滚动更新呢?
第一步:Deployment会更改pod模板为V2。
第二步:Deployment控制器再创建一个新的RS。我们的期望是从左边的RS迁移到右边的RS。
` 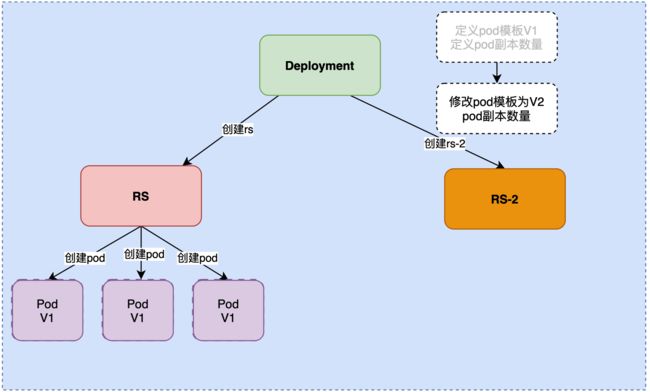
第三步:RS-2再创建一个新的 Pod, 将其升级到v2版本. 然后下掉一个v1版本的Pod
第四步:在创建一个Pod, 将其版本升级到v2, 在下掉一个v1版本的Pod
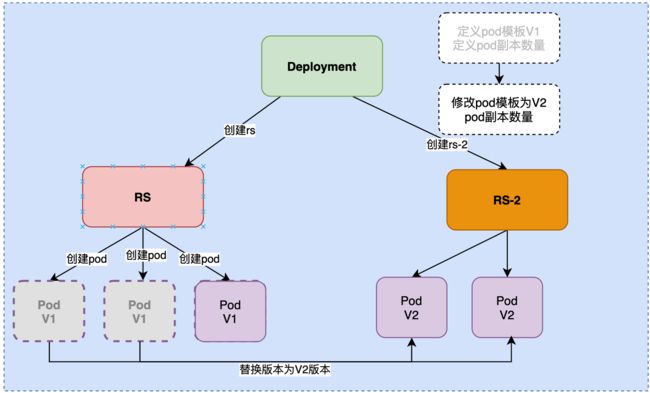
第五步:直至全部下完.

这就是Deployment管理的滚动rolling-update滚动升级。
如果升级的过程中, 发现新版本有一些小bug, 我们还可以回滚. 如何回滚, 执行undo即可. 回滚的逻辑和版本升级的原理一样. 恢复一个v1, 下掉一个v2. 直至全部恢复.
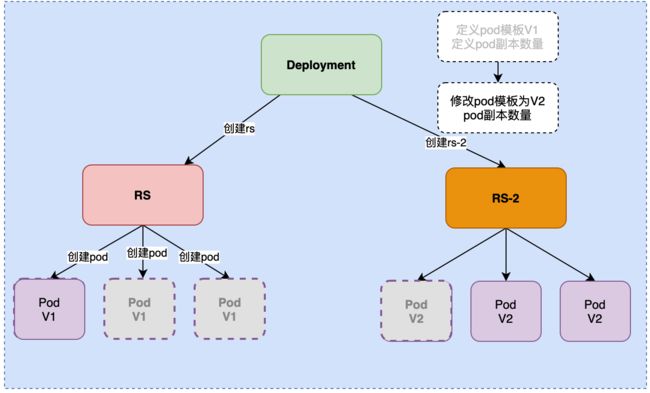
为什么RS能够恢复呢?
因为, 下掉的RS没有被删掉. 只是停用了. 当回滚的时候, 老旧的RS就会被启动.
iv. HPA控制器
Horizontal Pod Autoscaling 简称HPA控制器,仅适用于Deployment和ReplicaSet,在V1版本中仅支持根据Pod的CPU利用率扩缩容,在vlalpha版本中,可以根据内存和用户自定义的metric扩缩容。
举个例子:
首先,我们创建出一个Deployment控制器或者RS控制器,这个控制器会创建pod副本,在Deployment或者RS之上可以增加一个HPA控制器。HPA也是一个对象, 他是基于RS创建的。HPA控制器可以定义一个阈值,比如CPU使用率大于80%的时候,进行扩容;CPU使用率小于20%的时候进行缩容。pod副本数最小2个,最大20个。
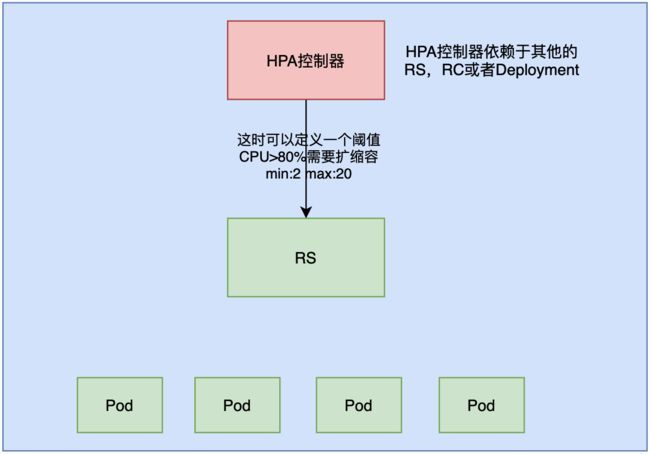
于是,当cpu使用率超过80%的时候,RS会自动进行扩容,最大扩容到20个副本。

如果创建了20个副本以后,CPU依然大于80%,那么就爱莫能助了。
缩容也是一样的,当cpu使用率很小的时候,就缩容,但最小是2个。也即是减到只剩2个pod, 不能再减了.
这样就达到了一个水平扩展的目的. 这也是HPA帮我们实现的.
v. statefulSet
statefulSet主要解决的是有状态服务的问题. docker主要面对的是无状态服务。
服务的分类:
1. 无状态服务: 踢出去过段时间放回来, 依然能正常工作. 比如LVS调度器, APACHE(http服务)
为什么apache是无状态服务呢? 因为apache中的数据可以通过共享服务来完成. 对于组件本身他不需要数据, 也没有数据的更新. 所以, apache被定义到无状态服务里面.
docker: 对于docker来说, 他更适合运行的是无状态服务.
2. 有状态服务: 踢出集群后过段时间再放回来, 就不能正常工作了, 这样的服务就是有状态服务. 比如: 数据库DBMS, 因为有很大一部分数据缺失了.
Kubernetes的一个难点就是必须要攻克有状态服务. 那么, 有状态服务, 有些数据需要持久化, 需要保存起来, 这时,我们就会引入存储的概念.
主要解决的是有状态服务的问题. docker主要面对的是无状态服务, 无状态服务的含义时, 没有对应的存储需要实时的保留. 或者是把他摘出来, 经过一段时间以后, 放回去依然能够工作. 典型的无状态服务有哪些呢? 比如: apache服务, LVS服务(负载均衡调度器) . 典型的有状态服务有哪些呢?mysql, mongodb, 他们需要实时的对数据进行更新和存储. 把他抽离出集群,再放回来就没办法工作了. statefulSet就是为了解决有状态服务而诞生的. Deployment 和 ReplicaSet是无状态服务
statefulset的应用场景包括:
1>稳定的持久化存储.
即Pod重新调度后还是能访问到相同的持久化数据. 基于PVC来实现.
Pod重新调度指的是Pod死亡以后, 我们会在调度回来。也就是创建一个新的Pod,创建的这个新的Pod取代原来的Pod的时候, 他的存储依然是之前的存储, 并不会变, 并且里面的数据也不会丢失.
2> 稳定的网络标识:
即Pod重新调度后,其PodName和HostName是不变的,也就是说之前的Pod叫什么, 现在Pod就叫什么. 之前的主机名是什么,现在的主机名还是哪个。 基于Headless Service(即没有Cluster IP 的Service)来实现。
3> 有序部署.
有序部署分为扩展和回收两个阶段.
- 有序扩展. 即Pod是有顺序的, 再部署或扩展的时候, 要依据定义的顺序一次进行(即从0到n-1, 在下一个pod运行之前, 所有之前的Pod必须都是Running和Ready的标志), 基于init Containars实现
只有当前一个Pod处于running和ready的状态, 第二个才可以被创建. 为什么需要这样部署呢? 原因是, 我们构建一个集群化, 比如集群里有nginx, apache, mysql. 我们的启动顺序是先启mysql, 再启apache, 再启nginx, 因为他们之间是有依赖关系的. nginx依赖apache, apache依赖mysql. 这就是有序部署.
4> 有序收缩, 有序删除
回收也是一样的是有序的, 不同的是, 他是逆序回收. 从n-1开始, 一直到0.
vi. **DaemonSet: **
确保全部(或一些)Node上运行一个Pod的副本. 当有Pod加入集群时, 也会为他们增加一个Pod副本, 当有Pod从集群移除时, Pod副本也会被回收,删除DeamonSet会删除对应的所有的Pod.
- 这里说的是确保全部或者一些,为什么会是一些呢?这是因为,我们可以在node上打污点,打上污点的node是不被调度的。所以,在DaemonSet运行的时候,打了污点的node是不会被创建的。默认情况下,所有node都会被运行。每个pod只会创建一个副本。
使用DaemonSet的典型用法:
- 运行集群存储daemon, 例如在每个Node上运行glusterd, ceph.
- 在每个节点上运行日志收集daemon, 例如fluentd, logstash.
- 在每个节点上运行监控daemon, 例如Prometheus, Node Exporter.
只要有需求,每个node上都可以运行一个守护进程,去帮我们做一些事情,这个时候就可以使用DaemonSet
vii. Job, CronJob
-
Job是负责批处理的任务. 仅执行一次的任务, 它保证批处理任务的一个或多个Pod成功结束
比如: 我想备份数据库, 备份代码可以放在Pod里, 我们将其放到Job里去执行,脚本是可以正常执行正常工作。直接在linux操作, 到时间就可以把脚本运行, 执行出来. linux操作系统执行不也是一样的么?
一方面封装成pod, 我们可以重复利用;
另一方面,如果脚本执行意外退出,是没办法重复执行的,job如果判断当前脚本不是正常退出,她会重新执行一遍脚本.直到正常退出为止,并且还可以设置政策退出的次数.
-
CronJob管理基于时间的Pob, 在特定的时间可以执行
即
》在给定的时间点只运行一次
》周期性的再交给时间点运行
3. 服务发现
k8s是如何实现服务间的调用的呢?这就是接下来要说的服务发现

客户端想要访问一组pod, 如果这些pod是无相干的话,是不能通过Service统一代理的. pod需要具有相关性, 比如由同一个rs//rc/deployment创建的, 或者拥有同一组标签, 这样的话可以被service收集到. 即: service去搜集Pod是通过标签去选择到的. 这一点很重要.
选择到以后, service会有自己的ip+port, 客户端就可以访问service的ip+端口. 间接访问pod. 并且这里有一个RR的算法存在.
假设我们现在有一个简单的集群环境:
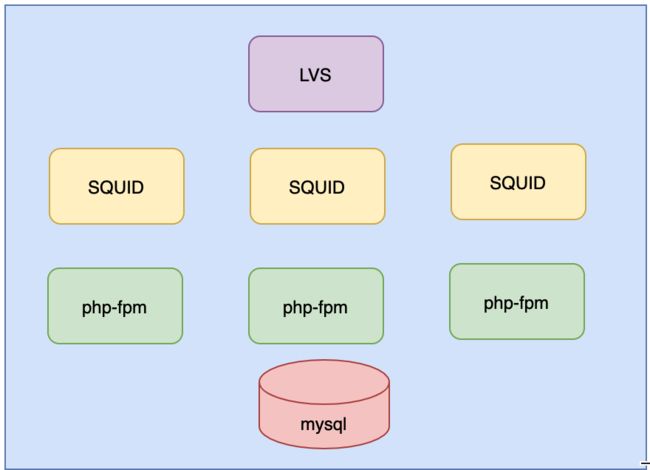
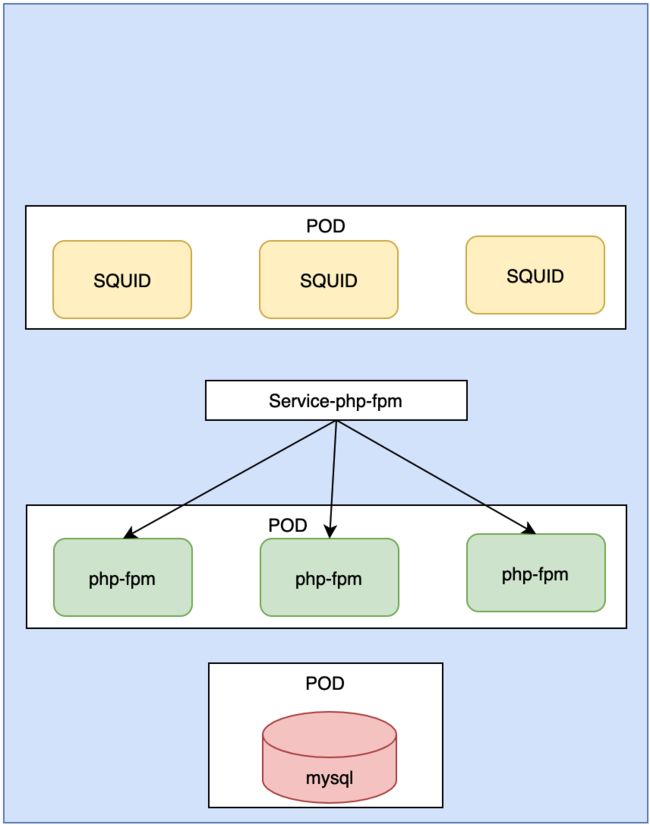
有一个myqsl, 三台apache-fpm, 三台缓存服务器SQUID, 有一个负载均衡器LVS. 我们来分析一下, 如果把这个集群放到k8s中应该如何部署.
1> mysql需要运行在一个Pod中
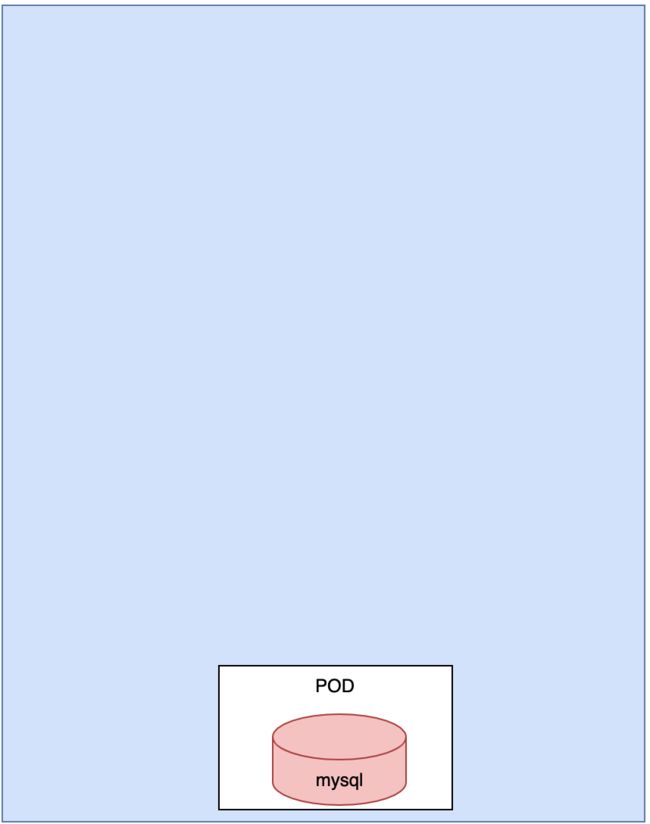
在k8s上创建一个pod,里面在创建一个mysql容器
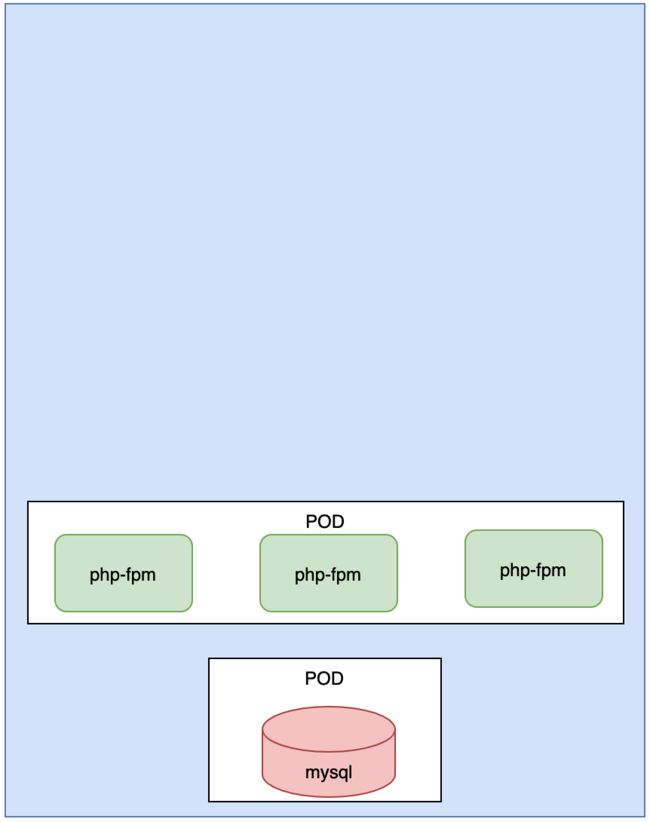
2> apache-fpm, 有三个, 其实他们都是类似, 所以我们可以把它放到Deployment控制器中创建, Deployment可以配置apache-fpm的副本数有3个副本
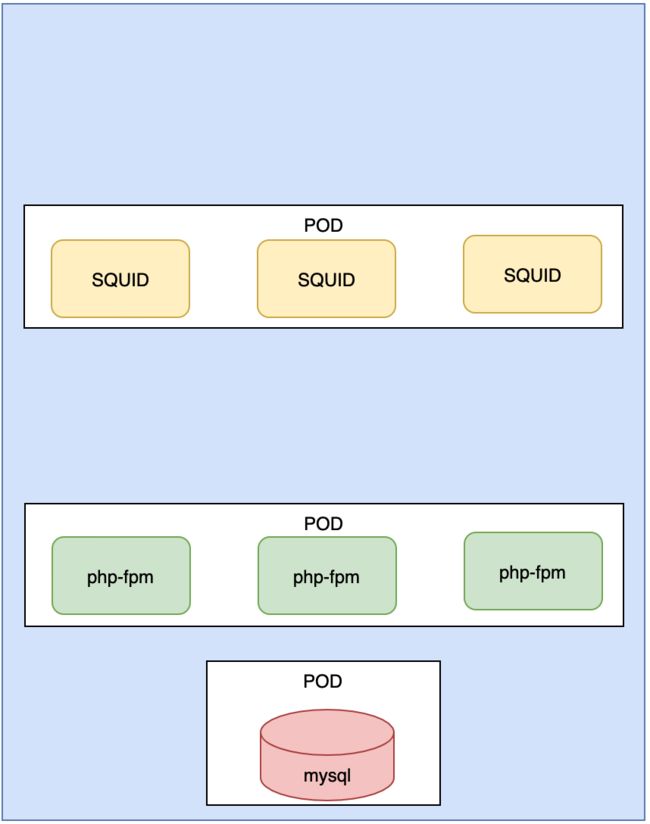
3> SQUID,缓存服务器也有三个, 我们也可以把它放到Deployment控制器中创建.
4> LVS, 可以用集群本身的功能, 进行负载调度.
现在这种结构, 我们发现, 如果缓存服务器SQUID想要访问apapche-fpm, 写反向代理的话, 需要写三台服务器. 并且, pod如果退出重新创建, 那么pod的ip地址会变换. 除非采用的是statefulSet, 但是在apache-fpm中使用statefulSet是没有意义, 因为他是一个无状态服务 . 那怎么办呢? 我么可以在前面加一个service, 这个service就是Service-php-fpm的. 他会绑定我们的标签.
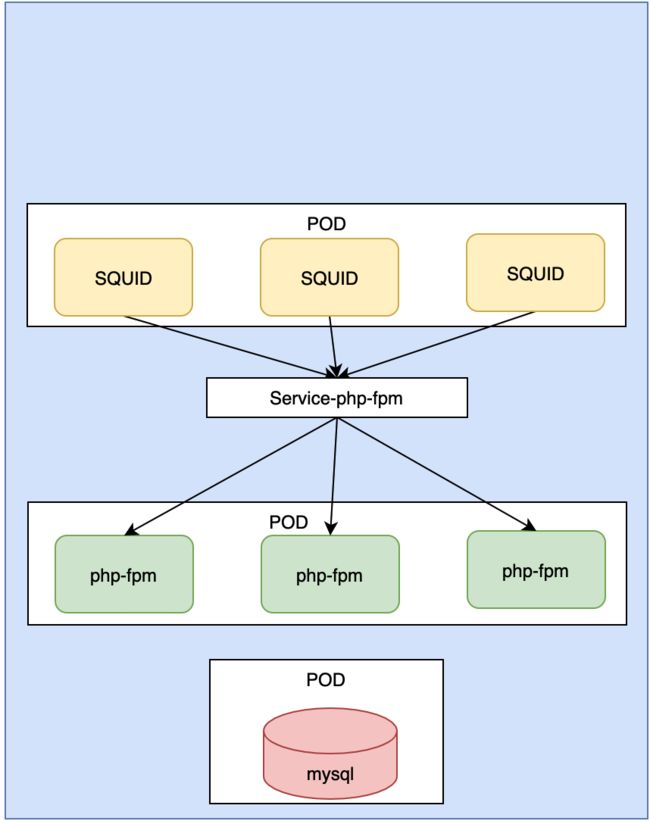
SQUID去进行反向代理设定的时候, 不需要写php-fpm的三个ip地址了, 而且, pod死亡以后, 控制器会把他维持到三个副本, 会在自动创建一个, 新创建的ip地址和原来的是不一样的. SQUID如果在里面填写的是目标ip, 就有问题. 所以, SQUID里面写的是server-php-fpm的地址. 这样SQUID只要执行到Service-php-fpm上面即可.
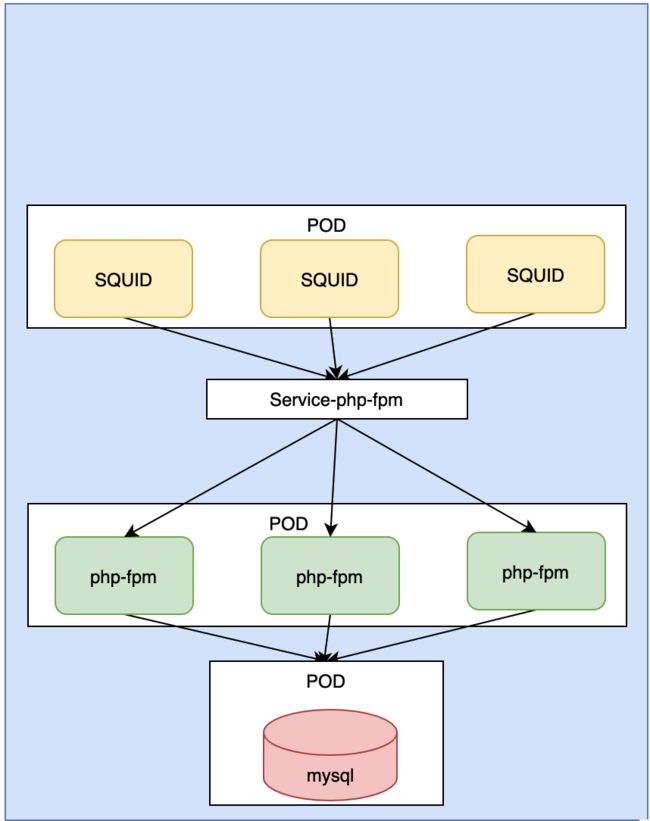
mysql也是一个pod, 我们要求mysql这个pod如果死了,重启, 他的ip地址和主机名是不能变的, 因此我们把它放到statefulSet中.
Kubernetes内部是一个扁平化的网络, 相互之间可以通过localhost请求访问, 所以, 关联关系如下:
SQUID需要被外网访问, 因此, 我们在SQUID上也可以创建一个Service-SQUID

这样,我们就可以把这个架构完整的部署在k8s集群中了.