- 【Freertos实战】零基础制作基于stm32的物联网温湿度检测(教程非常简易)持续更新中.........
熬夜的猪仔
stm32物联网嵌入式硬件
本次记录采用Freertos的第二个DIY作品,基于Onenet的物联网温湿度检测系统,此次代码依然是全部开源。通过网盘分享的文件:物联网温湿度检测.rar链接:https://pan.baidu.com/s/1uj9UURVtGE6ZB6OsL2W8lw?pwd=qm2e提取码:qm2e大家也可以看看我上个的开源项目【Freertos实战】零基础制作基于stm32智能小车(教程非常简易)实物演示
- STM32 ADC详解
月入鱼饵
stm32嵌入式硬件单片机
本文介绍stm32ADC的使用,本文较长,可以配合目录跳转到需要的地方阅读。ADC转换原理本文重点在于STM32的ADC的使用,介绍ADC转换原理是为了更好理解STM32中关于ADC的配置,所以这里只是简单介绍一下ADC的转换原理,想详细了解ADC的转换原理可以看看看完这篇文章,终于搞懂了ADC原理及分类!和ADC基本工作原理-CSDN。简单来说,模拟信号输入进来,经过低通滤波操作预处理信号之后,
- STM32-DAC数模转换
DAC数模转换:将数字信号转换成模拟信号特性:2个DAC转换器每个都拥有一个转换通道8位或12位单调输出(8位右对齐;12位左对齐右对齐)双ADC通道同时或者分别转换外部触发中断电压源控制部分(外部触发3个APB1;不使用1个APB1)外部触发输出:DAC1-PA4;DAC2-PA5软件设计流程:使能端口以及DAC时钟;设置引脚为模拟输入RCC_APB2PeriphClockCmd(RCC_APB
- STM32F1单片机驱动42步进电机
All right 1
STM32学习单片机stm32嵌入式硬件
我们使用的单片机是STM32F103ZET6,电机是42步进电机(额定电流是1A)、驱动是TMC2209;但是暂时使用2160这个外接驱动(注意:2160为大电流电机驱动不能长时间带动这个42电机,否则会发烫烧电机)。开启一个定时器2外设中断:为电机提供步进脉冲;开启三个GPIO口:作为EN、STEP、DIR控制;42步进电机:步距角1.8°、16细分、3200步每圈。一、代码:tim.c:/*U
- 让电机转起来--基于STM32F1控制两相步进电机转动-新手小白入(完整代码)
梦想是成为甜妹儿
stm32嵌入式硬件单片机
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、基础内容1、步进电机2、电机驱动器3、接线方法二、最简单控制电机转动程序1.定时器的输出比较功能生成PWM波2.电机方向控制3.主函数三、进阶版电机控制程序1.加入按键控制2.motor.c中添加一个函数3.主函数总结前言本帖分享步进电机与驱动器的接线方式、速度计算与代码分析。第一次接触电机的小白可能会面对无数的代码分
- stm32与ESP32-C3通过串口连接
林内克思
stm32嵌入式硬件单片机
ESP32-C3是一款安全稳定、低功耗、低成本的物联网芯片,搭载RISC-V32位单核处理器,支持2.4GHzWi-Fi和Bluetooth5(LE)。ESP32-C3本身就可以作为一个单片机使用,但是我们这里只是把ESP32-C3作为一个Wi-Fi/蓝牙模块使用。STM32与ESP32-C3使用串口进行通讯。STM32可以给ESP32-C3发送命令,这种命令叫ESP-AT指令。首先通过pc串口E
- STM32CubeMX配置-看门狗配置
一叶知秋06
MCUstm32嵌入式硬件单片机
一、简介MCU为STM32G070,LSI为32K,看门狗IWDG配置为4S溢出,则配置是设置分频为32分频,重装载值为3000。二、IWDG配置1.外设配置2.时钟配置3.生成代码HAL_IWDG_Refresh(&hiwdg);//喂狗
- STM32 CubMax 6.1.1 版本安装包
姜奇惟Sparkling
STM32CubMax6.1.1版本安装包【下载地址】STM32CubMax6.1.1版本安装包本仓库提供STM32CubeMX6.1.1版本的安装包,支持Linux、macOS和Windows64位系统。STM32CubeMX是STMicroelectronics推出的一款图形化配置工具,能够自动生成适用于STM32微控制器的初始化代码,极大地简化了开发流程。用户只需根据操作系统选择相应的安装包
- 使用STM32单片机控制步进电动机是一个常见的应用场景
QoyOle
单片机stm32mongodb
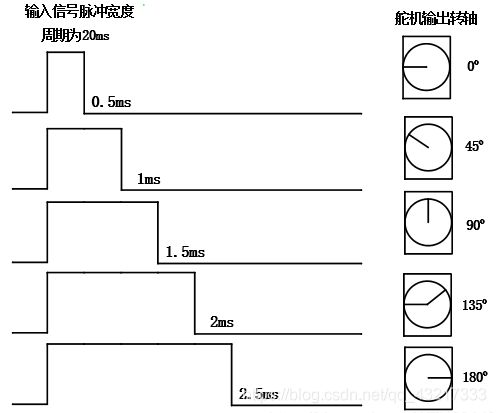
使用STM32单片机控制步进电动机是一个常见的应用场景。步进电动机可以通过产生脉冲信号来控制转动角度和速度。在本文中,我们将详细介绍如何使用STM32单片机来生成脉冲信号并控制步进电动机。下面是一个简要的步骤概览:初始化STM32单片机的GPIO引脚:首先,我们需要初始化单片机的GPIO引脚,以将其配置为输出模式。这些引脚将用于产生脉冲信号,并控制步进电动机的步进脚。具体的引脚配置取决于你使用的具
- 基于STM32金属探测器设计
摘要随着便携式金属探测器在安防,考古及工业检测等领域需求的增加,现有探测器的体积大,能耗高,操作复杂的缺点亟需解决。本文针对便携式金属探测器的设计进行探索,在硬件上使用了STM32F103C8T6单片机模块,WL02涡流传感器模块,ADS1115模数转换模块,蜂鸣器模块等设计出本系统的电路,在软件上设计出主程序,信号采集及报警子程序等,对系统进行基础功能,灵敏度,抗干扰和耐久性测试,测试结果表明探
- STM32F1系列综合测试程序实践指南
Love Snape
本文还有配套的精品资源,点击获取简介:STM32F1系列微控制器是基于ARMCortex-M3内核的低成本、高性能嵌入式系统解决方案。本综合测试程序旨在帮助初学者快速掌握STM32的基础操作和关键知识点,包括裸机编程、GPIO操作、定时器应用、串行通信、ADC转换、中断处理和Bootloader等。同时,程序将指导学习者熟悉开发环境和理解代码结构,为未来在嵌入式系统开发领域打下坚实的基础。1.ST
- STM32与FPGA用FMC进行通讯
weixin_43554366
单片机stm32fpga物联网人工智能
stm32正常按读写SDRAM进行配置,FPGA进行信号采集。FPGA信号采集发现SDWNE是高但H7手册上时序显示是低,造成无法像FPGA模拟的SDRAM无法写入数据FPGA采集信号应该在时钟下降沿,上升沿采集,数据会发生错误。
- 2 STM32单片机-蜂鸣器驱动
书山有路勤为径~
物联网-单片机单片机stm32嵌入式硬件
系列文章目录文章目录系列文章目录前言1硬件连接2目录结构3软件编写3.1main.c3.2beep_driver3.2.1beep_driver.c3.2.2beep_driver.h3.3board_config3.3.1board_config.c3.3.2board_config.h3.4utils3.4.1system_config.h总结前言在各种单片机中,都离不开蜂鸣器。蜂鸣器可以作为
- STM32-- 调试 -日志输出
code_snow
stm32stm32嵌入式硬件单片机
在调试嵌入式程序时,输出日志是非常重要的环节,可以帮助开发者定位问题、监控程序状态和性能。以下是几种常见的日志输出方式及其适用场景:1.使用串口(UART)输出日志实现方式:通过串口将日志输出到主机的串口工具(如PuTTY、TeraTerm、minicom)中。优点:简单易用,几乎所有嵌入式设备都支持。实时性强,适合调试运行时的动态信息。与printf结合使用方便。示例代码:#include//配
- 单片机STM32F103:DMA的原理以及应用
InnoLink_1024
单片机嵌入式C/C++单片机stm32
STM32F103系列微控制器(基于ARMCortex-M3内核)集成了**DMA(DirectMemoryAccess,直接内存访问)**控制器,用于在存储器与外设、存储器与存储器之间高效传输数据,减少CPU的干预,从而提升系统性能。本文将详细介绍STM32F103的DMA原理、架构、功能特性及使用方法,结合实际代码示例说明如何在开发中应用DMA,特别以STM32CubeMX和HAL库为工具。1
- STM32F103采用DMA方式多路ADC采样
章鱼哥嵌入式开发
STM32单片机开发产品进阶stm32单片机嵌入式硬件c语言51单片机
STM32F103采用DMA方式多路ADC采样文章目录STM32F103采用DMA方式多路ADC采样前言一、头文件adc.h二、初始化配置1.ADCGPIO配置2.开启ADC和DMA时钟3.多路ADCDMA采样配置三、软件滤波四、主函数调用1.初始化函数配置2.main函数调用总结前言stm32采用DMA方式进行ADC采样可以高效的进行数据采集,不用cpu实时参与,以节省单片机资源,让单片机可以在
- STM32F103:ADC采样——定时器触发+DMA传输
Forster-C
stm32单片机stm32c语言
实现ADC多通道采样,采用DMA传输,采样由定时器触发初始化代码:voidAdc_Init(void){GPIO_InitTypeDefGPIO_InitStructure;DMA_InitTypeDefDMA_InitStructure;ADC_InitTypeDefADC_InitStructure;TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;TI
- 使用STM32CubeMX在嵌入式系统中实现通过FMC读写SDRAM
程序员杨弋
嵌入式开发stm32嵌入式硬件单片机嵌入式
嵌入式系统中的存储器是非常重要的组成部分,为了满足大容量和高速度要求,SDRAM(SynchronousDynamicRandomAccessMemory)是常用的选择之一。本文将介绍如何使用STM32CubeMX配置硬件FMC(FlexibleMemoryController)以实现在STM32微控制器上读写SDRAM。1、STM32CubeMX配置FMC和SDRAM首先,我们需要打开STM32
- 多通路fpga 通信_FMC与FPGA双口ram通讯
weixin_39796752
多通路fpga通信
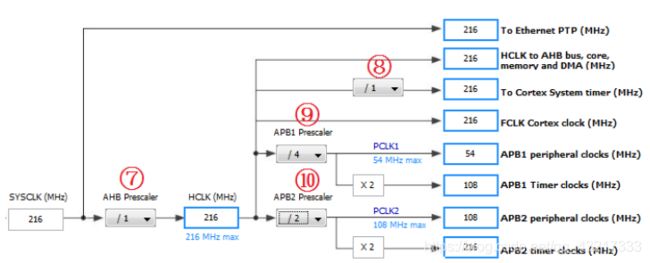
硬件环境:ARM+FPGA通过FMC互联,STM32F767和EP4CE15F23I7FMC设置,STM的系统时钟HCLK为216MHz1/*FMCinitializationfunction*/2voidMX_FMC_Init(void)3{4FMC_NORSRAM_TimingTypeDefTiming;56/**PerformtheNOR1memoryinitializationsequen
- 第十五届蓝桥杯嵌入式客观题真题(第二场)(个人错点总结)
lo卖火柴的小熊猫
电子相关竞赛分享蓝桥杯职场和发展嵌入式硬件
题目忘记拷贝了--,回忆到的写一下1.常见放大器的功能有(ABCD)A.放大B.滤波C.振荡D.比较X.stm32的ADC功能描述正确的是(ABCD)A.自校准B.12位采样精度C.单/多采集设置D.软件设置左靠右靠数据阵列X.RS485旁路的对称电阻作用.(D)A.B.静电保护C.防止浪涌D.防止信号反射X.BUCK电路的电平转换功能(D)A.AC/ACB.AC/DCC.DC/ACD.DC/DC
- 基于STM32单片机的物联网温室玫瑰种植系统
文章目录一、目的和意义二、项目内容和功能介绍三、效果图四、资料获取一、目的和意义基于STM32单片机的物联网温室玫瑰种植系统介绍一、系统概述基于STM32单片机的物联网温室玫瑰种植系统,是集环境监测、自动控制、远程管理于一体的智能化农业解决方案。该系统以STM32为核心控制器,通过传感器实时采集温室内的温度、湿度、光照、二氧化碳浓度、土壤温湿度及氮磷钾含量等关键参数,结合物联网技术实现数据远程传输
- 基于STM32单片机的考勤打卡系统
文章目录一、系统概述二、项目内容和功能介绍三、效果图四、资料获取一、系统概述基于STM32单片机的考勤打卡系统介绍一、系统概述基于STM32单片机的考勤打卡系统是一种集数据采集、身份识别、记录存储与远程管理于一体的智能化考勤解决方案。该系统以STM32微控制器为核心,通过非接触式识别技术(如RFID、指纹、人脸识别)或传统输入方式(如按键、密码)快速采集员工考勤信息,结合实时时钟模块(RTC)记录
- STM32F103C8T6标准库对SD卡读取数据的详细步骤
GC_June07
stm32嵌入式硬件单片机
一、准备工作模块:STM32F103C8T6核心板、ST-LINK下载器、CH340、SD卡、SD卡模块、SD卡读卡器二、代码编写(标准库)①主函数:main说明:用串口1打印信息charSD_FileName[]="hello.txt";uint8_twrite_buf[]="WBQ牛逼!!!\r\n";intmain(void){ uint8_tres; uart_init(960
- 嵌入式系统:多路温度采集与环境报警监测
DevCyberX
嵌入式
概述:本文介绍了如何使用单片机、LM35温度传感器、ADC0832模数转换器和DS18B20数字温度传感器构建一个嵌入式系统,用于多路温度采集和环境报警监测。通过该系统,可以实时监测多个温度传感器的温度,并在温度超过设定阈值时触发报警。硬件组件:单片机:选择一款适合的单片机(如Arduino、STM32等)作为主控制器。LM35温度传感器:用于测量环境温度。ADC0832模数转换器:将模拟信号转换
- 我的大学 ------------ 机械、单片机、电子设计大赛、算法、PAT之旅
iamttp
个人感悟PAT电赛大学记录
自己又好久没有写博客了,如果你看过我的github会发现我最近也没怎么更新github了。我最近干什么呢?答案是我这个暑假在参加全国大学生电子设计大赛以及刷算法准备参加PAT。大一记得刚入大学那一会,我还是机械设计制造及其自动化的一名学生,接触了solidworks和c语言,还有又爱又恨的单片机。我在寒假练习了很长时间的stm32单片机和solidworks。然后一次很重要的制图方面的比赛,我用s
- WiFi通信——STM32通过ESP8266-01S上传DHT11温湿度和LED灯状态到阿里云物联网平台上(二)MQTT协议代码讲解
文科比理科更擅长的工科男
STM32单片机实战项目讲解stm32阿里云物联网
上一篇博客讲了ESP8266-01S的MQTT固件包烧录过程,配置了阿里云物联网平台,并且利用MQTT.fx验证和阿里云通信的过程,链接如下:https://blog.csdn.net/weixin_41011452/article/details/1406451301MQTT协议MQTT(MessageQueuingTelemetryTransport,消息队列遥测传输协议)是IBM在1999年
- STM32F103+FreeRTOS的使用ESP8266与手机APP实现TCP连接通信控制
前言本人初学FreeRTOS,来自不知名普通院校,大二物联网专业,简单看完百问网韦东山老师FreeRTOS就想随便找个小项目试试看,手头里没什么元器件,只有一块ESP8266wifi模块以及温湿度模块显示屏模块,所以用到的模块不多,这俩个模块可能不太适用于FreeRTOS,但主要目的想着以最少的资源练练手,文中有缺陷或需补全的地方欢迎指导,大佬误喷。需要主要的细节有:ESP8266模块与手机APP
- STM32第十七天ESP8266-01Swifi模块
Do vis824
stm32嵌入式硬件单片机
ESP8266-01Swifi模块1:ESP8266是实现wifi通讯的一个模块种类,有很多分类包含esp8266-12、esp8266-12E、ESP8266-01S、esp32等等。esp8266-01S由一颗esp8266作为主控再由一块flash作为存储芯片组成,带有板载芯片供电采用3.3V电压使用串口进行烧写程序和AT指令集调试,注意芯片一旦烧写了程序使不可使用AT指令集,需要重新刷回A
- STM32第十八天 ESP8266-01S和电脑实现串口通信
Do vis824
stm32嵌入式硬件单片机
一:ESP和电脑实现串口通信1.配置WiFi模式AT+CWMODE=3//softAP+stationmode响应:OK2.连接路路由器器AT+CWJAP="SSID","password"//SSIDandpasswordofrouter响应:OK3.查询ESP8266设备的IP地址AT+CIFSR响应:+CIFSR:APIP,"192.168.4.1"+CIFSR:APMAC,"1a:fe:3
- stm32 micropython vscode_VS Code 上最硬核的 MicroPython 插件
weixin_39968309
stm32micropythonvscode
介绍VSCode上最硬核的MicroPython插件——RT-ThreadMicroPython,为MicroPython开发提供了强大的开发环境,主要特性如下:设备快速连接(串口、网络、USB)支持基于MicroPython的代码智能补全与语法检查支持MicroPythonREPL交互环境提供丰富的代码示例与demo程序提供工程同步功能支持下载单个文件或文件夹至开发板支持在内存中快速运行代码文件
- apache 安装linux windows
墙头上一根草
apacheinuxwindows
linux安装Apache 有两种方式一种是手动安装通过二进制的文件进行安装,另外一种就是通过yum 安装,此中安装方式,需要物理机联网。以下分别介绍两种的安装方式
通过二进制文件安装Apache需要的软件有apr,apr-util,pcre
1,安装 apr 下载地址:htt
- fill_parent、wrap_content和match_parent的区别
Cb123456
match_parentfill_parent
fill_parent、wrap_content和match_parent的区别:
1)fill_parent
设置一个构件的布局为fill_parent将强制性地使构件扩展,以填充布局单元内尽可能多的空间。这跟Windows控件的dockstyle属性大体一致。设置一个顶部布局或控件为fill_parent将强制性让它布满整个屏幕。
2) wrap_conte
- 网页自适应设计
天子之骄
htmlcss响应式设计页面自适应
网页自适应设计
网页对浏览器窗口的自适应支持变得越来越重要了。自适应响应设计更是异常火爆。再加上移动端的崛起,更是如日中天。以前为了适应不同屏幕分布率和浏览器窗口的扩大和缩小,需要设计几套css样式,用js脚本判断窗口大小,选择加载。结构臃肿,加载负担较大。现笔者经过一定时间的学习,有所心得,故分享于此,加强交流,共同进步。同时希望对大家有所
- [sql server] 分组取最大最小常用sql
一炮送你回车库
SQL Server
--分组取最大最小常用sql--测试环境if OBJECT_ID('tb') is not null drop table tb;gocreate table tb( col1 int, col2 int, Fcount int)insert into tbselect 11,20,1 union allselect 11,22,1 union allselect 1
- ImageIO写图片输出到硬盘
3213213333332132
javaimage
package awt;
import java.awt.Color;
import java.awt.Font;
import java.awt.Graphics;
import java.awt.image.BufferedImage;
import java.io.File;
import java.io.IOException;
import javax.imagei
- 自己的String动态数组
宝剑锋梅花香
java动态数组数组
数组还是好说,学过一两门编程语言的就知道,需要注意的是数组声明时需要把大小给它定下来,比如声明一个字符串类型的数组:String str[]=new String[10]; 但是问题就来了,每次都是大小确定的数组,我需要数组大小不固定随时变化怎么办呢? 动态数组就这样应运而生,龙哥给我们讲的是自己用代码写动态数组,并非用的ArrayList 看看字符
- pinyin4j工具类
darkranger
.net
pinyin4j工具类Java工具类 2010-04-24 00:47:00 阅读69 评论0 字号:大中小
引入pinyin4j-2.5.0.jar包:
pinyin4j是一个功能强悍的汉语拼音工具包,主要是从汉语获取各种格式和需求的拼音,功能强悍,下面看看如何使用pinyin4j。
本人以前用AscII编码提取工具,效果不理想,现在用pinyin4j简单实现了一个。功能还不是很完美,
- StarUML学习笔记----基本概念
aijuans
UML建模
介绍StarUML的基本概念,这些都是有效运用StarUML?所需要的。包括对模型、视图、图、项目、单元、方法、框架、模型块及其差异以及UML轮廓。
模型、视与图(Model, View and Diagram)
&
- Activiti最终总结
avords
Activiti id 工作流
1、流程定义ID:ProcessDefinitionId,当定义一个流程就会产生。
2、流程实例ID:ProcessInstanceId,当开始一个具体的流程时就会产生,也就是不同的流程实例ID可能有相同的流程定义ID。
3、TaskId,每一个userTask都会有一个Id这个是存在于流程实例上的。
4、TaskDefinitionKey和(ActivityImpl activityId
- 从省市区多重级联想到的,react和jquery的差别
bee1314
jqueryUIreact
在我们的前端项目里经常会用到级联的select,比如省市区这样。通常这种级联大多是动态的。比如先加载了省,点击省加载市,点击市加载区。然后数据通常ajax返回。如果没有数据则说明到了叶子节点。 针对这种场景,如果我们使用jquery来实现,要考虑很多的问题,数据部分,以及大量的dom操作。比如这个页面上显示了某个区,这时候我切换省,要把市重新初始化数据,然后区域的部分要从页面
- Eclipse快捷键大全
bijian1013
javaeclipse快捷键
Ctrl+1 快速修复(最经典的快捷键,就不用多说了)Ctrl+D: 删除当前行 Ctrl+Alt+↓ 复制当前行到下一行(复制增加)Ctrl+Alt+↑ 复制当前行到上一行(复制增加)Alt+↓ 当前行和下面一行交互位置(特别实用,可以省去先剪切,再粘贴了)Alt+↑ 当前行和上面一行交互位置(同上)Alt+← 前一个编辑的页面Alt+→ 下一个编辑的页面(当然是针对上面那条来说了)Alt+En
- js 笔记 函数
征客丶
JavaScript
一、函数的使用
1.1、定义函数变量
var vName = funcation(params){
}
1.2、函数的调用
函数变量的调用: vName(params);
函数定义时自发调用:(function(params){})(params);
1.3、函数中变量赋值
var a = 'a';
var ff
- 【Scala四】分析Spark源代码总结的Scala语法二
bit1129
scala
1. Some操作
在下面的代码中,使用了Some操作:if (self.partitioner == Some(partitioner)),那么Some(partitioner)表示什么含义?首先partitioner是方法combineByKey传入的变量,
Some的文档说明:
/** Class `Some[A]` represents existin
- java 匿名内部类
BlueSkator
java匿名内部类
组合优先于继承
Java的匿名类,就是提供了一个快捷方便的手段,令继承关系可以方便地变成组合关系
继承只有一个时候才能用,当你要求子类的实例可以替代父类实例的位置时才可以用继承。
在Java中内部类主要分为成员内部类、局部内部类、匿名内部类、静态内部类。
内部类不是很好理解,但说白了其实也就是一个类中还包含着另外一个类如同一个人是由大脑、肢体、器官等身体结果组成,而内部类相
- 盗版win装在MAC有害发热,苹果的东西不值得买,win应该不用
ljy325
游戏applewindowsXPOS
Mac mini 型号: MC270CH-A RMB:5,688
Apple 对windows的产品支持不好,有以下问题:
1.装完了xp,发现机身很热虽然没有运行任何程序!貌似显卡跑游戏发热一样,按照那样的发热量,那部机子损耗很大,使用寿命受到严重的影响!
2.反观安装了Mac os的展示机,发热量很小,运行了1天温度也没有那么高
&nbs
- 读《研磨设计模式》-代码笔记-生成器模式-Builder
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
/**
* 生成器模式的意图在于将一个复杂的构建与其表示相分离,使得同样的构建过程可以创建不同的表示(GoF)
* 个人理解:
* 构建一个复杂的对象,对于创建者(Builder)来说,一是要有数据来源(rawData),二是要返回构
- JIRA与SVN插件安装
chenyu19891124
SVNjira
JIRA安装好后提交代码并要显示在JIRA上,这得需要用SVN的插件才能看见开发人员提交的代码。
1.下载svn与jira插件安装包,解压后在安装包(atlassian-jira-subversion-plugin-0.10.1)
2.解压出来的包里下的lib文件夹下的jar拷贝到(C:\Program Files\Atlassian\JIRA 4.3.4\atlassian-jira\WEB
- 常用数学思想方法
comsci
工作
对于搞工程和技术的朋友来讲,在工作中常常遇到一些实际问题,而采用常规的思维方式无法很好的解决这些问题,那么这个时候我们就需要用数学语言和数学工具,而使用数学工具的前提却是用数学思想的方法来描述问题。。下面转帖几种常用的数学思想方法,仅供学习和参考
函数思想
把某一数学问题用函数表示出来,并且利用函数探究这个问题的一般规律。这是最基本、最常用的数学方法
- pl/sql集合类型
daizj
oracle集合typepl/sql
--集合类型
/*
单行单列的数据,使用标量变量
单行多列数据,使用记录
单列多行数据,使用集合(。。。)
*集合:类似于数组也就是。pl/sql集合类型包括索引表(pl/sql table)、嵌套表(Nested Table)、变长数组(VARRAY)等
*/
/*
--集合方法
&n
- [Ofbiz]ofbiz初用
dinguangx
电商ofbiz
从github下载最新的ofbiz(截止2015-7-13),从源码进行ofbiz的试用
1. 加载测试库
ofbiz内置derby,通过下面的命令初始化测试库
./ant load-demo (与load-seed有一些区别)
2. 启动内置tomcat
./ant start
或
./startofbiz.sh
或
java -jar ofbiz.jar
&
- 结构体中最后一个元素是长度为0的数组
dcj3sjt126com
cgcc
在Linux源代码中,有很多的结构体最后都定义了一个元素个数为0个的数组,如/usr/include/linux/if_pppox.h中有这样一个结构体: struct pppoe_tag { __u16 tag_type; __u16 tag_len; &n
- Linux cp 实现强行覆盖
dcj3sjt126com
linux
发现在Fedora 10 /ubutun 里面用cp -fr src dest,即使加了-f也是不能强行覆盖的,这时怎么回事的呢?一两个文件还好说,就输几个yes吧,但是要是n多文件怎么办,那还不输死人呢?下面提供三种解决办法。 方法一
我们输入alias命令,看看系统给cp起了一个什么别名。
[root@localhost ~]# aliasalias cp=’cp -i’a
- Memcached(一)、HelloWorld
frank1234
memcached
一、简介
高性能的架构离不开缓存,分布式缓存中的佼佼者当属memcached,它通过客户端将不同的key hash到不同的memcached服务器中,而获取的时候也到相同的服务器中获取,由于不需要做集群同步,也就省去了集群间同步的开销和延迟,所以它相对于ehcache等缓存来说能更好的支持分布式应用,具有更强的横向伸缩能力。
二、客户端
选择一个memcached客户端,我这里用的是memc
- Search in Rotated Sorted Array II
hcx2013
search
Follow up for "Search in Rotated Sorted Array":What if duplicates are allowed?
Would this affect the run-time complexity? How and why?
Write a function to determine if a given ta
- Spring4新特性——更好的Java泛型操作API
jinnianshilongnian
spring4generic type
Spring4新特性——泛型限定式依赖注入
Spring4新特性——核心容器的其他改进
Spring4新特性——Web开发的增强
Spring4新特性——集成Bean Validation 1.1(JSR-349)到SpringMVC
Spring4新特性——Groovy Bean定义DSL
Spring4新特性——更好的Java泛型操作API
Spring4新
- CentOS安装JDK
liuxingguome
centos
1、行卸载原来的:
[root@localhost opt]# rpm -qa | grep java
tzdata-java-2014g-1.el6.noarch
java-1.7.0-openjdk-1.7.0.65-2.5.1.2.el6_5.x86_64
java-1.6.0-openjdk-1.6.0.0-11.1.13.4.el6.x86_64
[root@localhost
- 二分搜索专题2-在有序二维数组中搜索一个元素
OpenMind
二维数组算法二分搜索
1,设二维数组p的每行每列都按照下标递增的顺序递增。
用数学语言描述如下:p满足
(1),对任意的x1,x2,y,如果x1<x2,则p(x1,y)<p(x2,y);
(2),对任意的x,y1,y2, 如果y1<y2,则p(x,y1)<p(x,y2);
2,问题:
给定满足1的数组p和一个整数k,求是否存在x0,y0使得p(x0,y0)=k?
3,算法分析:
(
- java 随机数 Math与Random
SaraWon
javaMathRandom
今天需要在程序中产生随机数,知道有两种方法可以使用,但是使用Math和Random的区别还不是特别清楚,看到一篇文章是关于的,觉得写的还挺不错的,原文地址是
http://www.oschina.net/question/157182_45274?sort=default&p=1#answers
产生1到10之间的随机数的两种实现方式:
//Math
Math.roun
- oracle创建表空间
tugn
oracle
create temporary tablespace TXSJ_TEMP
tempfile 'E:\Oracle\oradata\TXSJ_TEMP.dbf'
size 32m
autoextend on
next 32m maxsize 2048m
extent m
- 使用Java8实现自己的个性化搜索引擎
yangshangchuan
javasuperword搜索引擎java8全文检索
需要对249本软件著作实现句子级别全文检索,这些著作均为PDF文件,不使用现有的框架如lucene,自己实现的方法如下:
1、从PDF文件中提取文本,这里的重点是如何最大可能地还原文本。提取之后的文本,一个句子一行保存为文本文件。
2、将所有文本文件合并为一个单一的文本文件,这样,每一个句子就有一个唯一行号。
3、对每一行文本进行分词,建立倒排表,倒排表的格式为:词=包含该词的总行数N=行号