10. STM32——PWM 控制舵机(超声波感应开盖垃圾桶)
STM32——PWM 控制舵机
- 通用定时输出PWM
-
- PWM的工作原理
- PWM的模式
-
- TIM_OCMode_PWM1 (边沿对齐模式)
- TIM_OCMode_PWM2(中央对齐模式)
- 占空比
- 舵机
-
- 实物图
- 接线
- 舵机工作原理
- 周期T
- PWM占空比
- TIM3 PWM输出 驱动SG90电机 配置过程:
-
- 1. 使能GPIO时钟,TIM定时器时钟,部分重映射时钟
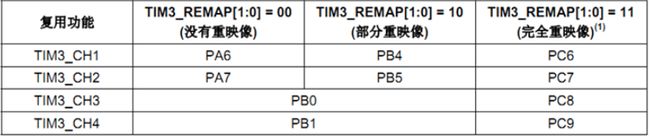
- 2. 重映射定时器
- 3. 配置GPIO结构体
- 4. 配置通用定时器TIM结构体
- 5. 配置PWM
- stm32 超声波感应开盖垃圾桶
-
- motor.c
- motor.h
- HC_SR04.c
- HC_SR04.h
- usart.c
- usart.h
- main.c
- stm32 超声波感应开盖垃圾桶 效果展示
通用定时输出PWM
以TIM3为例,STM32的通用定时器氛围TIM2,TIM3,TIM4,TIM5,每个定时器都有独立的四个通道可以用来作为: 输入捕获,输出比较,PWM输出,单脉冲模式输出等。
STM32的定时器除了TIM6和TIM7(基本定时器)之外,其他的定时器都可以产生PWM波输出,高级定时器TIM1,TIM8可以同时产生7路PWM输出,而通用定时器可以同时产生4路PWM输出,这样STM32可以最多同时输出30路PWM输出!
PWM的工作原理
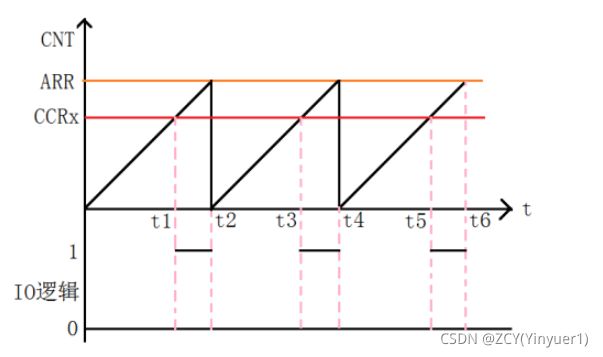
以向上计数为例,讲述PWM原理:
-
在PWM输出模式下除了CNT(计数器当前值),ARR(自动重装载值),CCRx(捕获/比较寄存器值)。
-
当CNT小于CCRx时,TIMx_CHx通道输出低电平
-
当CNT等于或大于CCRx时,TIMx_CHx通道输出高电平
所谓脉宽调制信号(PWM波),就是一个TIMx_ARR自动重装载寄存器确定频率(由它决定PWM周期),TIM_CCRx寄存器确定占空比信号。
PWM的模式
TIM_OCMode_PWM1 (边沿对齐模式)
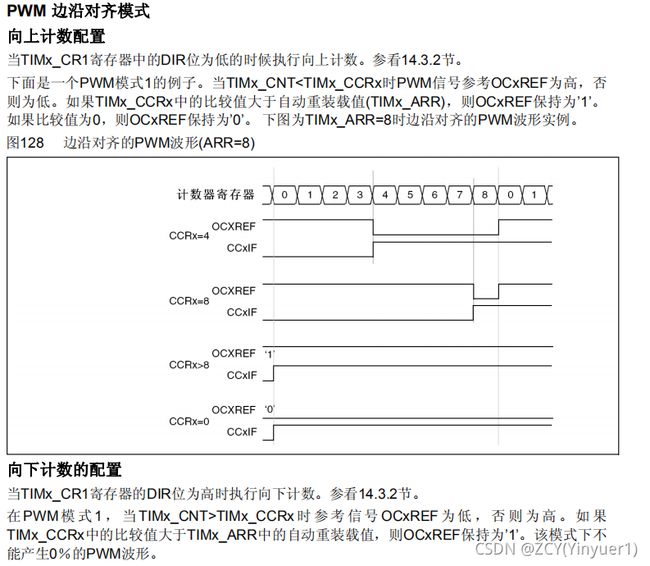
向上计数时: 当TIMx_CNT 向下计数时: 一旦TIMx_CNT>TIMx_CCRx,CCR1通道1为无效电平,否则为有效电平。 向上计数时: 当TIMx_CNT 向下计数时: 一旦TIMx_CNT>TIMx_CCRx,CCR1通道1为有效电平,否则为无效电平。 是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。 SG9O电机 硬件接线: 红线 : 3.3v/ 5v 舵机的主要组成部分为伺服电机,所谓伺服就是服从信号的要求而动作。在信号来之前,转子停止不动;信号来到之后,转子立即运动。因此我们就可以给舵机输入不同的信号,来控制其旋转到不同的角度。 舵机上有三根线,分别是GND、VCC和SIG,也就是地线、电源线和信号线,其中的PWM波就是从信号线输入给舵机的。 PWM周期为20ms = 0.02s = (7200*200)/72000000 是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比.由于PWM周期为20ms,所以(以舵机会转动 45°为例),占空比就应该为1ms/20ms = 5%,所以TIM_SetCompare1的 TIMx 捕获比较 1 寄存器值就为200 * 5% = 10 单位: % (0%~100%) 在STM32第9篇中可以找到 9. STM32——HC_SR04超声波测距 在STM32分栏第9篇中可以找到 9. STM32——HC_SR04超声波测距 在STM32分栏第6篇中可以找到 6. STM32——用串口发送数据点亮LED(串口的中断接收) 在STM32分栏第6篇中可以找到 6. STM32——用串口发送数据点亮LED(串口的中断接收) 如果觉得这篇文章对你有用。欢迎大家点赞、评论哈哈TIM_OCMode_PWM2(中央对齐模式)
占空比

舵机
实物图

接线
黑 / 棕线 : GND
黄线 : 信号线舵机工作原理
舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定的PWM信号,舵机就可以旋转到指定的位置。
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms~2.5ms之间时舵机就可以对应旋转到不同的角度。
t = 0.5ms——————-舵机会转到 0 °
t = 1.0ms——————-舵机会转到 45°
t = 1.5ms——————-舵机会转到 90°
t = 2.0ms——————-舵机会转到 135°
t = 2.5ms——————-舵机会转到 180°
周期T
PWM占空比
TIM3 PWM输出 驱动SG90电机 配置过程:
1. 使能GPIO时钟,TIM定时器时钟,部分重映射时钟
//1.使能GPIO时钟、定时器时钟、复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
2. 重映射定时器
//2.重映射定时器
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
3. 配置GPIO结构体
GPIO_InitTypeDef gpioInitStructure;
//3.配置GPIO
gpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
gpioInitStructure.GPIO_Pin = GPIO_Pin_5; //引脚5
gpioInitStructure.GPIO_Speed = GPIO_Speed_10MHz; //10Hz
GPIO_Init(GPIOB, &gpioInitStructure); //初始化
4. 配置通用定时器TIM结构体
TIM_TimeBaseInitTypeDef timInitStructure;
//4.配置定时器
timInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频
timInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
timInitStructure.TIM_Period = 200-1; //设置了在下一个更新事件装入活动的自动重装载寄存器周期的值。
timInitStructure.TIM_Prescaler = 7200-1; //设置了用来作为 TIMx时钟频率除数的预分频值。
TIM_TimeBaseInit(TIM3, &timInitStructure); //初始化
5. 配置PWM

//5.配置PWM
timOCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //边沿对齐模式
timOCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能
timOCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置为高电平有效
TIM_OC2Init(TIM3, &timOCInitStructure); //初始化
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //配置自动加载的预加载寄存器
TIM_Cmd(TIM3, ENABLE); //使能
stm32 超声波感应开盖垃圾桶
motor.c
#include "motor.h"
#include "stm32f10x.h"
void motor_Init(void)
{
GPIO_InitTypeDef gpioInitStructure;
TIM_TimeBaseInitTypeDef timInitStructure;
TIM_OCInitTypeDef timOCInitStructure;
//1.使能GPIO时钟、定时器时钟、复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//2.重映射定时器
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
//3.配置GPIO
gpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
gpioInitStructure.GPIO_Pin = GPIO_Pin_5;
gpioInitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOB, &gpioInitStructure);
//4.配置定时器
timInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
timInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
timInitStructure.TIM_Period = 200-1;
timInitStructure.TIM_Prescaler = 7200-1;
TIM_TimeBaseInit(TIM3, &timInitStructure);
//5.配置PWM
timOCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
timOCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
timOCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &timOCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
motor.h
#include "stm32f10x.h"
void motor_Init(void);
HC_SR04.c
HC_SR04.h
usart.c
usart.h
main.c
#include "stm32f10x.h"
#include "main.h"
#include "led.h"
#include "shake.h"
#include "relay.h"
#include "exti.h"
#include "usart.h"
#include "tim.h"
#include "motor.h"
#include "SysTick.h"
#include "HC_SR04.h"
int main()
{
float Length=0;
// int pwmval=155;
motor_Init();
HC_SR04Init();
usart_init();
// printf("abc");
while(1)
{
Length=Get_Length();
printf("%.3f\r\n",Length);
delay_ms(100);
if(Length<5)
{
TIM_SetCompare2(TIM3, 15);
delay_ms(1000);
}
else if(Length>5)
{
TIM_SetCompare2(TIM3, 25);
}
}
}
stm32 超声波感应开盖垃圾桶 效果展示
需要整个工程代码,欢迎大家打赏,评论区留上你的邮箱 or vx or qq。o( ̄︶ ̄)o
