百度飞桨架构师手把手带你零基础实践深度学习——【手写数字识别】之训练调试与优化
百度飞桨架构师手把手带你零基础实践深度学习——打卡计划
- 总目录
- 【手写数字识别】之训练调试与优化
-
- 概述
- 计算模型的分类准确率
- 检查模型训练过程,识别潜在训练问题
- 加入校验或测试,更好评价模型效果
- 加入正则化项,避免模型过拟合
- 过拟合现象
- 导致过拟合原因
- 过拟合的成因与防控
- 正则化项
- 可视化分析
- 使用Matplotlib库绘制损失随训练下降的曲线图
- 使用VisualDL可视化分析
下面给出课程链接,欢迎各位小伙来来报考!本帖将持续更新。我只是飞桨的搬运工

话不多说,这么良心的课程赶快扫码上车!https://aistudio.baidu.com/aistudio/education/group/info/1297?activityId=5&directly=1&shared=1
总目录
【手写数字识别】之训练调试与优化
概述
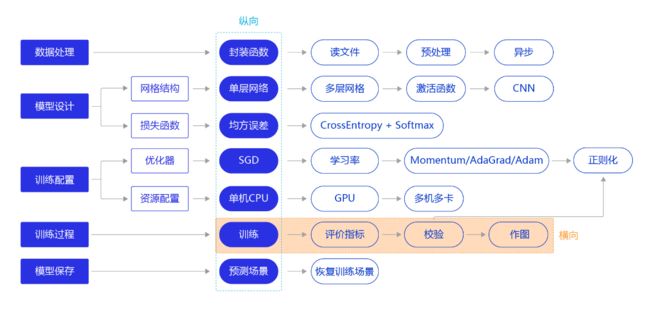
上一节我们研究了资源部署优化的方法,通过使用单GPU和分布式部署,提升模型训练的效率。本节我们依旧横向展开"横纵式",如 图1 所示,探讨在手写数字识别任务中,为了保证模型的真实效果,在模型训练部分,对模型进行一些调试和优化的方法。
训练过程优化思路主要有如下五个关键环节:
1. 计算分类准确率,观测模型训练效果。
交叉熵损失函数只能作为优化目标,无法直接准确衡量模型的训练效果。准确率可以直接衡量训练效果,但由于其离散性质,不适合做为损失函数优化神经网络。
2. 检查模型训练过程,识别潜在问题。
如果模型的损失或者评估指标表现异常,通常需要打印模型每一层的输入和输出来定位问题,分析每一层的内容来获取错误的原因。
3. 加入校验或测试,更好评价模型效果。
理想的模型训练结果是在训练集和验证集上均有较高的准确率,如果训练集上的准确率高于验证集,说明网络训练程度不够;如果验证集的准确率高于训练集,可能是发生了过拟合现象。通过在优化目标中加入正则化项的办法,解决过拟合的问题。
4. 加入正则化项,避免模型过拟合。
飞桨框架支持为整体参数加入正则化项,这是通常的做法。此外,飞桨框架也支持为某一层或某一部分的网络单独加入正则化项,以达到精细调整参数训练的效果。
5. 可视化分析。
用户不仅可以通过打印或使用matplotlib库作图,飞桨还提供了更专业的可视化分析工具VisualDL,提供便捷的可视化分析方法。
计算模型的分类准确率
准确率是一个直观衡量分类模型效果的指标,由于这个指标是离散的,因此不适合作为损失函数来优化。通常情况下,交叉熵损失越小的模型,分类的准确率也越高。基于分类准确率,我们可以公平的比较两种损失函数的优劣,例如【手写数字识别】之损失函数 章节中均方误差和交叉熵的比较。
飞桨提供了计算分类准确率的API,使用fluid.layers.accuracy可以直接计算准确率,该API的输入参数input为预测的分类结果predict,输入参数label为数据真实的label。
在下述代码中,我们在模型前向计算过程forward函数中计算分类准确率,并在训练时打印每个批次样本的分类准确率。
# 加载相关库
import os
import random
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, Linear
import numpy as np
from PIL import Image
import gzip
import json
# 定义数据集读取器
def load_data(mode='train'):
# 读取数据文件
datafile = './work/mnist.json.gz'
print('loading mnist dataset from {} ......'.format(datafile))
data = json.load(gzip.open(datafile))
# 读取数据集中的训练集,验证集和测试集
train_set, val_set, eval_set = data
# 数据集相关参数,图片高度IMG_ROWS, 图片宽度IMG_COLS
IMG_ROWS = 28
IMG_COLS = 28
# 根据输入mode参数决定使用训练集,验证集还是测试
if mode == 'train':
imgs = train_set[0]
labels = train_set[1]
elif mode == 'valid':
imgs = val_set[0]
labels = val_set[1]
elif mode == 'eval':
imgs = eval_set[0]
labels = eval_set[1]
# 获得所有图像的数量
imgs_length = len(imgs)
# 验证图像数量和标签数量是否一致
assert len(imgs) == len(labels), \
"length of train_imgs({}) should be the same as train_labels({})".format(
len(imgs), len(labels))
index_list = list(range(imgs_length))
# 读入数据时用到的batchsize
BATCHSIZE = 100
# 定义数据生成器
def data_generator():
# 训练模式下,打乱训练数据
if mode == 'train':
random.shuffle(index_list)
imgs_list = []
labels_list = []
# 按照索引读取数据
for i in index_list:
# 读取图像和标签,转换其尺寸和类型
img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')
label = np.reshape(labels[i], [1]).astype('int64')
imgs_list.append(img)
labels_list.append(label)
# 如果当前数据缓存达到了batch size,就返回一个批次数据
if len(imgs_list) == BATCHSIZE:
yield np.array(imgs_list), np.array(labels_list)
# 清空数据缓存列表
imgs_list = []
labels_list = []
# 如果剩余数据的数目小于BATCHSIZE,
# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batch
if len(imgs_list) > 0:
yield np.array(imgs_list), np.array(labels_list)
return data_generator
# 定义模型结构
class MNIST(fluid.dygraph.Layer):
def __init__(self):
super(MNIST, self).__init__()
# 定义一个卷积层,使用relu激活函数
self.conv1 = Conv2D(num_channels=1, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool1 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个卷积层,使用relu激活函数
self.conv2 = Conv2D(num_channels=20, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool2 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个全连接层,输出节点数为10
self.fc = Linear(input_dim=980, output_dim=10, act='softmax')
# 定义网络的前向计算过程
def forward(self, inputs, label):
x = self.conv1(inputs)
x = self.pool1(x)
x = self.conv2(x)
x = self.pool2(x)
x = fluid.layers.reshape(x, [x.shape[0], 980])
x = self.fc(x)
if label is not None:
acc = fluid.layers.accuracy(input=x, label=label)
return x, acc
else:
return x
#调用加载数据的函数
train_loader = load_data('train')
#在使用GPU机器时,可以将use_gpu变量设置成True
use_gpu = False
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
with fluid.dygraph.guard(place):
model = MNIST()
model.train()
#四种优化算法的设置方案,可以逐一尝试效果
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.MomentumOptimizer(learning_rate=0.01, momentum=0.9, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdagradOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, parameter_list=model.parameters())
EPOCH_NUM = 5
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), acc.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
检查模型训练过程,识别潜在训练问题
使用飞桨动态图可以方便的查看和调试训练的执行过程。在网络定义的Forward函数中,可以打印每一层输入输出的尺寸,以及每层网络的参数。通过查看这些信息,不仅可以更好地理解训练的执行过程,还可以发现潜在问题,或者启发继续优化的思路。
在下述程序中,使用check_shape变量控制是否打印“尺寸”,验证网络结构是否正确。使用check_content变量控制是否打印“内容值”,验证数据分布是否合理。假如在训练中发现中间层的部分输出持续为0,说明该部分的网络结构设计存在问题,没有充分利用。
# 定义模型结构
class MNIST(fluid.dygraph.Layer):
def __init__(self):
super(MNIST, self).__init__()
# 定义一个卷积层,使用relu激活函数
self.conv1 = Conv2D(num_channels=1, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool1 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个卷积层,使用relu激活函数
self.conv2 = Conv2D(num_channels=20, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool2 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个全连接层,输出节点数为10
self.fc = Linear(input_dim=980, output_dim=10, act='softmax')
# 加入对每一层输入和输出的尺寸和数据内容的打印,根据check参数决策是否打印每层的参数和输出尺寸
def forward(self, inputs, label=None, check_shape=False, check_content=False):
# 给不同层的输出不同命名,方便调试
outputs1 = self.conv1(inputs)
outputs2 = self.pool1(outputs1)
outputs3 = self.conv2(outputs2)
outputs4 = self.pool2(outputs3)
_outputs4 = fluid.layers.reshape(outputs4, [outputs4.shape[0], -1])
outputs5 = self.fc(_outputs4)
# 选择是否打印神经网络每层的参数尺寸和输出尺寸,验证网络结构是否设置正确
if check_shape:
# 打印每层网络设置的超参数-卷积核尺寸,卷积步长,卷积padding,池化核尺寸
print("\n########## print network layer's superparams ##############")
print("conv1-- kernel_size:{}, padding:{}, stride:{}".format(self.conv1.weight.shape, self.conv1._padding, self.conv1._stride))
print("conv2-- kernel_size:{}, padding:{}, stride:{}".format(self.conv2.weight.shape, self.conv2._padding, self.conv2._stride))
print("pool1-- pool_type:{}, pool_size:{}, pool_stride:{}".format(self.pool1._pool_type, self.pool1._pool_size, self.pool1._pool_stride))
print("pool2-- pool_type:{}, poo2_size:{}, pool_stride:{}".format(self.pool2._pool_type, self.pool2._pool_size, self.pool2._pool_stride))
print("fc-- weight_size:{}, bias_size_{}, activation:{}".format(self.fc.weight.shape, self.fc.bias.shape, self.fc._act))
# 打印每层的输出尺寸
print("\n########## print shape of features of every layer ###############")
print("inputs_shape: {}".format(inputs.shape))
print("outputs1_shape: {}".format(outputs1.shape))
print("outputs2_shape: {}".format(outputs2.shape))
print("outputs3_shape: {}".format(outputs3.shape))
print("outputs4_shape: {}".format(outputs4.shape))
print("outputs5_shape: {}".format(outputs5.shape))
# 选择是否打印训练过程中的参数和输出内容,可用于训练过程中的调试
if check_content:
# 打印卷积层的参数-卷积核权重,权重参数较多,此处只打印部分参数
print("\n########## print convolution layer's kernel ###############")
print("conv1 params -- kernel weights:", self.conv1.weight[0][0])
print("conv2 params -- kernel weights:", self.conv2.weight[0][0])
# 创建随机数,随机打印某一个通道的输出值
idx1 = np.random.randint(0, outputs1.shape[1])
idx2 = np.random.randint(0, outputs3.shape[1])
# 打印卷积-池化后的结果,仅打印batch中第一个图像对应的特征
print("\nThe {}th channel of conv1 layer: ".format(idx1), outputs1[0][idx1])
print("The {}th channel of conv2 layer: ".format(idx2), outputs3[0][idx2])
print("The output of last layer:", outputs5[0], '\n')
# 如果label不是None,则计算分类精度并返回
if label is not None:
acc = fluid.layers.accuracy(input=outputs5, label=label)
return outputs5, acc
else:
return outputs5
#在使用GPU机器时,可以将use_gpu变量设置成True
use_gpu = False
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
with fluid.dygraph.guard(place):
model = MNIST()
model.train()
#四种优化算法的设置方案,可以逐一尝试效果
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.MomentumOptimizer(learning_rate=0.01, momentum=0.9, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdagradOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, parameter_list=model.parameters())
EPOCH_NUM = 1
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
if batch_id == 0 and epoch_id==0:
# 打印模型参数和每层输出的尺寸
predict, acc = model(image, label, check_shape=True, check_content=False)
elif batch_id==401:
# 打印模型参数和每层输出的值
predict, acc = model(image, label, check_shape=False, check_content=True)
else:
predict, acc = model(image, label)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了100批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), acc.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
print("Model has been saved.")
加入校验或测试,更好评价模型效果
在训练过程中,我们会发现模型在训练样本集上的损失在不断减小。但这是否代表模型在未来的应用场景上依然有效?为了验证模型的有效性,通常将样本集合分成三份,训练集、校验集和测试集。
- 训练集 :用于训练模型的参数,即训练过程中主要完成的工作。
- 校验集 :用于对模型超参数的选择,比如网络结构的调整、正则化项权重的选择等。
- 测试集 :用于模拟模型在应用后的真实效果。因为测试集没有参与任何模型优化或参数训练的工作,所以它对模型来说是完全未知的样本。在不以校验数据优化网络结构或模型超参数时,校验数据和测试数据的效果是类似的,均更真实的反映模型效果。
如下程序读取上一步训练保存的模型参数,读取测试数据集,并测试模型在测试数据集上的效果。
with fluid.dygraph.guard():
print('start evaluation .......')
#加载模型参数
model = MNIST()
model_state_dict, _ = fluid.load_dygraph('mnist')
model.load_dict(model_state_dict)
model.eval()
eval_loader = load_data('eval')
acc_set = []
avg_loss_set = []
for batch_id, data in enumerate(eval_loader()):
x_data, y_data = data
img = fluid.dygraph.to_variable(x_data)
label = fluid.dygraph.to_variable(y_data)
prediction, acc = model(img, label)
loss = fluid.layers.cross_entropy(input=prediction, label=label)
avg_loss = fluid.layers.mean(loss)
acc_set.append(float(acc.numpy()))
avg_loss_set.append(float(avg_loss.numpy()))
#计算多个batch的平均损失和准确率
acc_val_mean = np.array(acc_set).mean()
avg_loss_val_mean = np.array(avg_loss_set).mean()
print('loss={}, acc={}'.format(avg_loss_val_mean, acc_val_mean))
加入正则化项,避免模型过拟合
过拟合现象
对于样本量有限、但需要使用强大模型的复杂任务,模型很容易出现过拟合的表现,即在训练集上的损失小,在验证集或测试集上的损失较大,如 图2 所示。

图2:过拟合现象,训练误差不断降低,但测试误差先降后增
反之,如果模型在训练集和测试集上均损失较大,则称为欠拟合。过拟合表示模型过于敏感,学习到了训练数据中的一些误差,而这些误差并不是真实的泛化规律(可推广到测试集上的规律)。欠拟合表示模型还不够强大,还没有很好的拟合已知的训练样本,更别提测试样本了。因为欠拟合情况容易观察和解决,只要训练loss不够好,就不断使用更强大的模型即可,因此实际中我们更需要处理好过拟合的问题。
导致过拟合原因
造成过拟合的原因是模型过于敏感,而训练数据量太少或其中的噪音太多。
如图3 所示,理想的回归模型是一条坡度较缓的抛物线,欠拟合的模型只拟合出一条直线,显然没有捕捉到真实的规律,但过拟合的模型拟合出存在很多拐点的抛物线,显然是过于敏感,也没有正确表达真实规律。
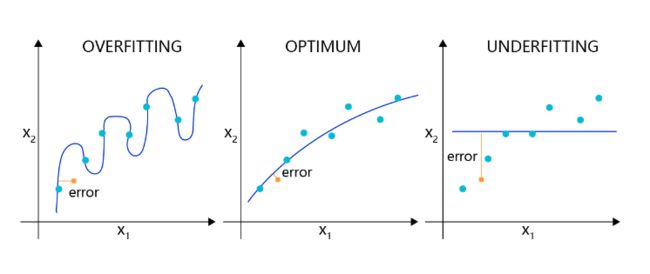
图3:回归模型的过拟合,理想和欠拟合状态的表现
如图4 所示,理想的分类模型是一条半圆形的曲线,欠拟合用直线作为分类边界,显然没有捕捉到真实的边界,但过拟合的模型拟合出很扭曲的分类边界,虽然对所有的训练数据正确分类,但对一些较为个例的样本所做出的妥协,高概率不是真实的规律。
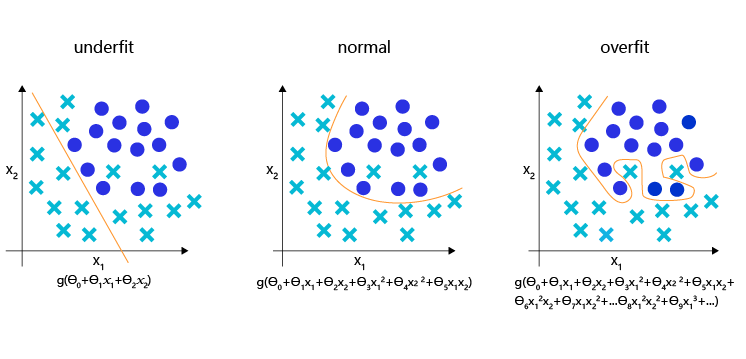
图4:分类模型的欠拟合,理想和过拟合状态的表现
过拟合的成因与防控
为了更好的理解过拟合的成因,可以参考侦探定位罪犯的案例逻辑,如 图5 所示。

图5:侦探定位罪犯与模型假设示意
对于这个案例,假设侦探也会犯错,通过分析发现可能的原因:
-
情况1:罪犯证据存在错误,依据错误的证据寻找罪犯肯定是缘木求鱼。
-
情况2:搜索范围太大的同时证据太少,导致符合条件的候选(嫌疑人)太多,无法准确定位罪犯。
那么侦探解决这个问题的方法有两种:或者缩小搜索范围(比如假设该案件只能是熟人作案),或者寻找更多的证据。
归结到深度学习中,假设模型也会犯错,通过分析发现可能的原因:
-
情况1:训练数据存在噪音,导致模型学到了噪音,而不是真实规律。
-
情况2:使用强大模型(表示空间大)的同时训练数据太少,导致在训练数据上表现良好的候选假设太多,锁定了一个“虚假正确”的假设。
对于情况1,我们使用数据清洗和修正来解决。 对于情况2,我们或者限制模型表示能力,或者收集更多的训练数据。
而清洗训练数据中的错误,或收集更多的训练数据往往是一句“正确的废话”,在任何时候我们都想获得更多更高质量的数据。在实际项目中,更快、更低成本可控制过拟合的方法,只有限制模型的表示能力。
正则化项
为了防止模型过拟合,在没有扩充样本量的可能下,只能降低模型的复杂度,可以通过限制参数的数量或可能取值(参数值尽量小)实现。
具体来说,在模型的优化目标(损失)中人为加入对参数规模的惩罚项。当参数越多或取值越大时,该惩罚项就越大。通过调整惩罚项的权重系数,可以使模型在“尽量减少训练损失”和“保持模型的泛化能力”之间取得平衡。泛化能力表示模型在没有见过的样本上依然有效。正则化项的存在,增加了模型在训练集上的损失。
飞桨支持为所有参数加上统一的正则化项,也支持为特定的参数添加正则化项。前者的实现如下代码所示,仅在优化器中设置regularization参数即可实现。使用参数regularization_coeff调节正则化项的权重,权重越大时,对模型复杂度的惩罚越高。
with fluid.dygraph.guard():
model = MNIST()
model.train()
#各种优化算法均可以加入正则化项,避免过拟合,参数regularization_coeff调节正则化项的权重
#optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, regularization=fluid.regularizer.L2Decay(regularization_coeff=0.1),parameter_list=model.parameters()))
optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, regularization=fluid.regularizer.L2Decay(regularization_coeff=0.1),parameter_list=model.parameters())
EPOCH_NUM = 10
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了100批次的数据,打印下当前Loss的情况
if batch_id % 100 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), acc.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
可视化分析
训练模型时,经常需要观察模型的评价指标,分析模型的优化过程,以确保训练是有效的。可选用这两种工具:Matplotlib库和VisualDL。
- Matplotlib库:Matplotlib库是Python中使用的最多的2D图形绘图库,它有一套完全仿照MATLAB的函数形式的绘图接口,使用轻量级的PLT库(Matplotlib)作图是非常简单的。
- VisualDL:如果期望使用更加专业的作图工具,可以尝试VisualDL,飞桨可视化分析工具。VisualDL能够有效地展示飞桨在运行过程中的计算图、各种指标变化趋势和数据信息。
使用Matplotlib库绘制损失随训练下降的曲线图
将训练的批次编号作为X轴坐标,该批次的训练损失作为Y轴坐标。
- 训练开始前,声明两个列表变量存储对应的批次编号(iters=[])和训练损失(losses=[])。
iters=[]
losses=[]
for epoch_id in range(EPOCH_NUM):
"""start to training"""
- 随着训练的进行,将iter和losses两个列表填满。
iters=[]
losses=[]
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
predict, acc = model(image, label)
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
# 累计迭代次数和对应的loss
iters.append(batch_id + epoch_id*len(list(train_loader()))
losses.append(avg_loss)
- 训练结束后,将两份数据以参数形式导入PLT的横纵坐标。
plt.xlabel("iter", fontsize=14),plt.ylabel("loss", fontsize=14)
- 最后,调用plt.plot()函数即可完成作图。
plt.plot(iters, losses,color='red',label='train loss')
详细代码如下:
#引入matplotlib库
import matplotlib.pyplot as plt
with fluid.dygraph.guard(place):
model = MNIST()
model.train()
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
EPOCH_NUM = 10
iter=0
iters=[]
losses=[]
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了100批次的数据,打印下当前Loss的情况
if batch_id % 100 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), acc.numpy()))
iters.append(iter)
losses.append(avg_loss.numpy())
iter = iter + 100
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
#画出训练过程中Loss的变化曲线
plt.figure()
plt.title("train loss", fontsize=24)
plt.xlabel("iter", fontsize=14)
plt.ylabel("loss", fontsize=14)
plt.plot(iters, losses,color='red',label='train loss')
plt.grid()
plt.show()
使用VisualDL可视化分析
飞桨可视化分析工具,以丰富的图表呈现训练参数变化趋势、模型结构、数据样本、高维数据分布等。帮助用户清晰直观地理解深度学习模型训练过程及模型结构,进而实现高效的模型调优,具体代码实现如下。
说明:
本案例不支持AI Studio演示,请读者在本地安装的飞桨上实践。
- 步骤1:引入VisualDL库,定义作图数据存储位置(供第3步使用),本案例的路径是“log”。
from visualdl import LogWriter
log_writer = LogWriter("./log")
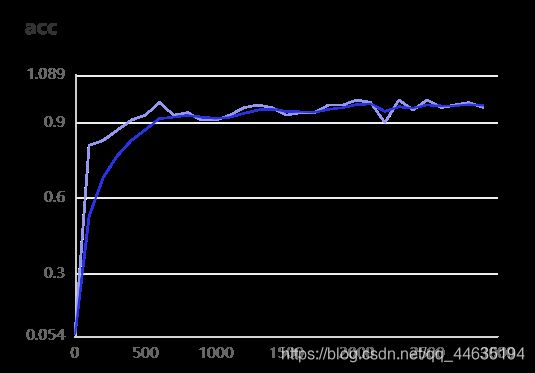
- 步骤2:在训练过程中插入作图语句。当每100个batch训练完成后,将当前损失作为一个新增的数据点(iter和acc的映射对)存储到第一步设置的文件中。使用变量iter记录下已经训练的批次数,作为作图的X轴坐标。
log_writer.add_scalar(tag = 'acc', step = iter, value = avg_acc.numpy())
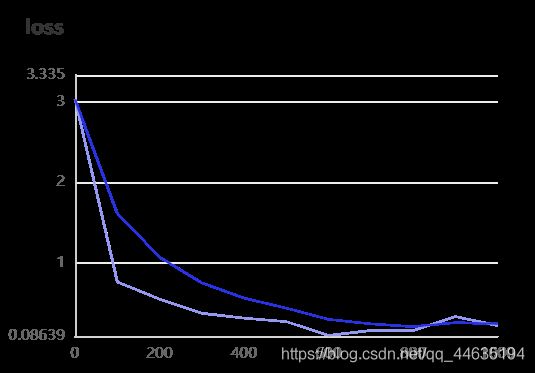
log_writer.add_scalar(tag = 'loss', step = iter, value = avg_loss.numpy())
iter = iter + 100
# 安装VisualDL
!pip install --upgrade --pre visualdl
#引入VisualDL库,并设定保存作图数据的文件位置
from visualdl import LogWriter
log_writer = LogWriter(logdir="./log")
with fluid.dygraph.guard():
model = MNIST()
model.train()
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
EPOCH_NUM = 10
iter = 0
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, avg_acc = model(image, label)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了100批次的数据,打印下当前Loss的情况
if batch_id % 100 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), avg_acc.numpy()))
log_writer.add_scalar(tag = 'acc', step = iter, value = avg_acc.numpy())
log_writer.add_scalar(tag = 'loss', step = iter, value = avg_loss.numpy())
iter = iter + 100
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
VisualDl最近也是刚加入ai studio平台,后面我会好好研究下,额外写一篇博客