深度学习主干网络-VGG16论文网络实现,参数介绍,数据处理,单通道,多通道数据,最大池化可视化。带源码。
VGG16卷积网络详解
机器学习基础知识:
1.相对熵(KL散度):
两个概率分布(probability distribution)间差异的非对称性度量
衡量任意一个分布偏离真实分布的程度,如果两个分布完全匹配,那么KL散度为0,否则KL散度取值为0到无穷大之间
神经网络基础知识:
1.卷积:
卷积核:卷积操作中的一个过滤器,用于提取我们图像的特征
卷积核大小:大小一般选择3x3和5x5,比较常用的是3x3
卷积核参数:
卷积核里面的每个值就是我们需要训练模型过程中的神经元参数(权重),开始会有随机的初始值,
当训练网络时,网络会通过后向传播不断更新这些参数值,知道寻找到最佳的参数值。对于如何判断参数值的最佳,则是通过loss损失函数来评估.
2.常见的卷积分为三类
假如卷积层的输入神经元个数为M,卷积大小为K,步长为S,在输入两端各添加P个0,那么该卷积层的神经元数量为:(M-K+2p)/S+1
1.窄卷积
S=1,两端不补0,此时卷积后输出长度为 M-K+1
2.宽卷积
S=1,两端补0 P = K-1,卷积后输出长度为 M+K-1
3.等宽卷积(常用这个)
S=1,两端补0 P=(K-1)/2 卷积后输出长度为M
2.常见的loss函数 :
最小二乘法,
交叉熵,
极大似然估计
3.卷积中的padding
作用:保持尺度不变,或者是为了利用卷积不到的边界,卷积操作之后维度变少,得到的矩阵比原来矩阵小,这样不好计算,而我们只是希望作卷积,所以我们需要Padding
边界数值的特征提取次数相对较少,为了能更好的把边界数值也利用上,所以给原始数据矩阵的四周都补上一层0
4.池化pooling
作用:池化操作相当于降维操作,降低数据量和计算量
最大池化:一般都采用最大池化,个人猜想是最大池化保留了边缘信息,关键信息
平均池化
5.Flatten
作用:将高维数据拉开,降维1维数据,方便输入全连接层
6.Dropout
作用:可以防止模型训练过拟合的情况
原理:训练过程中,按照一定的比例将网络中的神经元进行丢弃,模拟人的记忆遗忘特性
VGG-16 (Very Deep Convolutional Networks for Large-scale Image Recongnition)
VGG系列有很多文章,VGG-16特指层数为16层的那一篇
16 = 13
论文结论
1.在一定范围内,通过增加深度能有效地提升网络性能;
2.最佳模型:VGG16,从头到尾只有3x3卷积与2×2池化,简洁优美;
3.多个小卷积核比单个大卷积核性能好(与alxnet对比可知);
4.AlexNet曾经用到的LRN层并没有带来性能的提升,因此在其它组的网络中均没再出现LRN层;
5.尺度抖动scale jittering(多尺度训练,多尺度测试)有利于网络性能的提升。
VGG-16发展历史:
LeNet - 3个卷积层 + 2个下采样 + 1个FC
AlexNet - 5个卷积层 + 3个FC + 1个softmax
VGG-16 - 5个卷积层 + 5个maxpool + 3FC +1个softmax
VGG16网络结构:
注意:描述方式采用原文的描述方式, conv(接受大小范围) - (通道数量)
原文:denoted as “conv - "
input 为244x244的RGB图,所以是三个维度 244x244x3
【input 244x244】 ->【conv(3)-(64) ,con(3)-( 64)】->【maxpool】 3层 特征维度3->64
->【conv(3)-(128) ,con(3)-(128)】->【maxpool】 2层 特征维度64->128
->【conv(3)-(256) ,con(3)-(256),conv(3)-(256)】->【maxpool】 2层 特征维度128->256
->【conv(3)-(512) ,con(3)-(512),conv(3)-(512)】->【maxpool】 2层 特征维度256->512
->【conv(3)-(512) ,con(3)-(512),conv(3)-(512)】->【maxpool】 2层 特征维度512->512
-> 【FC-(4096)】 -> 【FC-(4096)】 -> 【FC-(1000)】 -> 【softmax】 ->【output】 5层 特征维度 4096->1000->概率【0,1】
总共 3+2+2+2+2+5 = 16层
注意: maxpool中 默认向下取整,maxpool不处理通道数,通道数不变
控制参数:
ceil_mode :如果等于True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作 maxpool默认向下取整
'''依据原始论文搭建VGG网络'''
import torch.nn as nn
import torch
import cv2
class VGG_16(nn.Module):
def __init__(self, num_channels=3): #由于传入的是RGB 所以传入通道为3
super(VGG_16, self).__init__()
#【input 244x244】 ->【conv(3)-(64) ,con(3)-( 64)】->【maxpool】 3层 特征维度3->64
self.conv1 = nn.Conv2d(in_channels=num_channels, out_channels=64, kernel_size=(3,3), padding='same')
self.conv2 = nn.Conv2d(64, 64, (3,3), padding='same')
#->【conv(3)-(128) ,con(3)-(128)】->【maxpool】 2层 特征维度64->128
self.conv3 = nn.Conv2d(64, 128, (3,3), padding='same')
self.conv4 = nn.Conv2d(128, 128, (3,3), padding='same')
# ->【conv(3)-(256) ,con(3)-(256),conv(3)-(256)】->【maxpool】 2层 特征维度128->256
self.conv5 = nn.Conv2d(128,256,(3,3),padding='same')
self.conv6 = nn.Conv2d(256,256,(3,3),padding='same')
self.conv7 = nn.Conv2d(256,256,(3,3),padding='same')
#->【conv(3)-(512) ,con(3)-(512),conv(3)-(512)】->【maxpool】 2层 特征维度256->512
self.conv8 = nn.Conv2d(256,512,(3,3),padding='same')
self.conv9 = nn.Conv2d(512,512,(3,3),padding='same')
self.conv10 = nn.Conv2d(512,512,(3,3),padding='same')
#->【conv(3)-(512) ,con(3)-(512),conv(3)-(512)】->【maxpool】 2层 特征维度512->512
self.conv11 = nn.Conv2d(512,512,(3,3),padding='same')
self.conv12 = nn.Conv2d(512,512,(3,3),padding='same')
self.conv13 = nn.Conv2d(512,512,(3,3),padding='same')
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2d(kernel_size=(2,2),stride=2)
self.linear1 = nn.Linear(in_features=512 * 7 * 7, out_features=4096)
self.linear2 = nn.Linear(in_features = 4096,out_features=4096)
self.dropout = nn.Dropout(p=0.5)
self.linear3 = nn.Linear(in_features=4096,out_features=1000)
self.sofmax = nn.Softmax()
def forward(self,input): # input 为 RGB 图片,此时我们关注一下图片的大小
temp = self.relu(self.conv1(input)) #244x244
temp = self.relu(self.conv2(temp))
temp = self.maxpool(temp) # (M-K+2p)/S+1 (244-2)/2+1 =122 此时图片大小 122x122
temp = self.relu(self.conv3(temp))
temp = self.relu(self.conv4(temp))
temp = self.maxpool(temp)# (122-2)/2+1 = 61 61x61
temp = self.relu(self.conv5(temp))
temp = self.relu(self.conv6(temp))
temp = self.relu(self.conv7(temp))
temp = self.maxpool(temp)# 向下取整(61-2)/2+1 = 30x30
temp = self.relu(self.conv8(temp))
temp = self.relu(self.conv9(temp))
temp = self.relu(self.conv10(temp))
temp = self.maxpool(temp) # (30-2)/2 +1 = 15 15x15
temp = self.relu(self.conv11(temp))
temp = self.relu(self.conv12(temp))
temp = self.relu(self.conv13(temp))
temp = self.maxpool(temp)# (15-2)/2+1 = 7x7
# torch.Size([1, 512, 7, 7])
temp = temp.reshape(-1) # 一维 25088
temp = self.relu(self.linear1(temp))
temp = self.dropout(temp)
temp = self.relu(self.linear2(temp))
temp = self.dropout(temp)
temp = self.relu(self.linear3(temp))
temp = self.sofmax(temp)
return temp
def observe_pool(self,input):
'''
此函数主要用来观测maxpool下采样后的图像样子 ,可以传入1 通道gray 或者三通道RGB,
格式要求:(batch_size,channels,Height, width)
或者是 (channels,Height, width)
'''
out1 = self.maxpool(input) #(244-2)/2+1 =122 此时图片大小 122x122
out2 = self.maxpool(out1) #(122-2)/2+1 = 61 61x61
out3 = self.maxpool(out2)
out4 = self.maxpool(out3)
out5 = self.maxpool(out4)
return [out1,out2,out3,out4,out5]
图像的上采样和下采样
opencv中给了好几种,这里介绍两种
1.高斯金字塔:同一图像不同分辨律的子图集合
下采样:
1.对图像IMG进行高斯卷积。
2.删除所有行和列。
上采样:
1.行和列扩展为原来的两倍,用0填充。
2.使用和向下采样同样的高斯核,并将其乘以m,对图像进行卷积。
2.resize (src,source)
1.最近邻插值 -INTER_NEAREST;
2.线性插值 -INTER_LINEAR;(默认值)
3.区域插值 -INTER_AREA;(利用像素区域关系的重采样插值)
4.三次样条插值 -INTER_CUBIC(超过4*4像素邻域内的双三次插值)
5.Lanczos插值 -INTER_LANCZOS4
'''生成一个VGG16 需要的图片数据'''
import cv2
import matplotlib.pyplot as plt
import numpy as np
img = cv2.imread('Pyramid.jpg') #此图片为 H x W x C 600x370x3 ,读入通道为BGR
img1 = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
'''图像金字塔,高斯金字塔,按比例上升,缩放'''
# img_down = cv2.pyrDown()
# print(img_down.shape) # 300,185,3
'''图像指定大小 resize 函数 cv2.resize(image,None,fx=int or float,fy=int or float)'''
re_img = cv2.resize(img,(244,244))
re_img1 = cv2.cvtColor(re_img,cv2.COLOR_BGR2RGB)
plt.subplot(1,2,1)
plt.title('row_img')
plt.imshow(img1)
plt.subplot(1,2,2)
plt.title('re_img')
plt.imshow(re_img1)
plt.show()

由于conv2d需要一个指定格式的数据
batch_size ,然后为通道数,然后才是图片的高和宽
故而需要处理图片的数据格式
由于只传入1张图片,所以batch——size = 1
'''数据格式处理'''
IMG = np.zeros((1,3,244,244))
R,G,B = re_img1[:,:,0],re_img1[:, :,1 ],re_img1[:, :,2 ]
IMG[:,0,:,:],IMG[:,1,:,:],IMG[:,2,:,:] = R,G,B
IMG = torch.tensor(IMG)
IMG = IMG.to(torch.float32)
IMG.shape,type(IMG[0,0,0,0])
(torch.Size([1, 3, 244, 244]), torch.Tensor)
'''测试VGG16网络'''
vgg16 = VGG_16(num_channels=3)
out = vgg16.forward(input=IMG)
print(out.shape) #torch.Size([1000])
torch.Size([1000])
E:\anaconda\envs\notebook\lib\site-packages\ipykernel_launcher.py:60: UserWarning: Implicit dimension choice for softmax has been deprecated. Change the call to include dim=X as an argument.
至此,完成了对VGG16的完成和实验
以下是对于最大池化的可视化理解
1.单通道的可视化
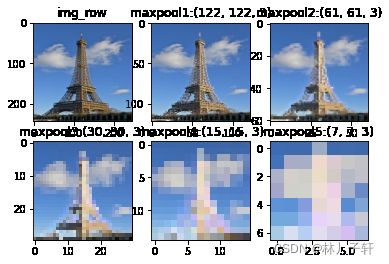
2.多通道的可视化
'''
numpy 维度降低
numpy.squeeze(axis=None)
从ndarray的shape中,去掉维度为1的。默认去掉所有的1。
注意:只能去掉shape中的1,其他数字的维度无法去除
'''
test1 = np.random.rand(1,1,244,244)
test2 = test1.squeeze()
test3 = test1.squeeze(0)
test4 = test3.squeeze(0)
test1.shape,test2.shape, test3.shape,test4.shape
((1, 1, 244, 244), (244, 244), (1, 244, 244), (244, 244))
'''观测一通道连续5层maxpool处理的图像'''
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img_gray_input = cv2.resize(img_gray,(244,244))
img_gray = img_gray_input.reshape((1,1,244,244))
img_gray = torch.tensor(img_gray).to(torch.float32)
out_gray = vgg16.observe_pool(img_gray)
plt.subplot(2,3,1)
plt.title('img_gray_input')
plt.imshow(img_gray_input,cmap='gray')
for index,data in enumerate(out_gray):
data = data.numpy() # [1,1,244,244]
data = data.squeeze() #244,244
plt.subplot(2,3,index+2)
plt.title(f'maxpool{index+1}:{data.shape}')
plt.imshow(data,cmap='gray')
plt.show()

RGB图像的通道拆分(cv2.split)与合并(cv2.merge)
一种调用函数的办法,拆分和合并图片的通道内容
例如下面
如果使用numpy 的话,暂时没有merge的办法,需要自己造轮子
a,b,c = np.array([[1,1,1,1],[1,1,1,1]]),np.array([[2,2,2,2],[2,2,2,2]]),np.array([[3,3,3,3],[3,3,3,3]])
abc1 = np.array([a,b,c])
''' 目前 (3,2,4)希望得到 (2,4,3)'''
abc2 = abc1.reshape((2,4,3))# 不是想要的数据
abc3 = abc1.reshape((2,4,3),order='F') # 不是想要的数据
merge_abc = cv2.merge([a,b,c],)
split_img = cv2.split(merge_abc)
merge_abc,split_img
(array([[[1, 2, 3],
[1, 2, 3],
[1, 2, 3],
[1, 2, 3]],
[[1, 2, 3],
[1, 2, 3],
[1, 2, 3],
[1, 2, 3]]], dtype=int32),
[array([[1, 1, 1, 1],
[1, 1, 1, 1]], dtype=int32),
array([[2, 2, 2, 2],
[2, 2, 2, 2]], dtype=int32),
array([[3, 3, 3, 3],
[3, 3, 3, 3]], dtype=int32)])
'''观测三通道连续5层maxpool处理的图像'''
'''数据格式处理'''
IMG = np.zeros((1,3,244,244))
R,G,B = re_img1[:,:,0],re_img1[:, :,1 ],re_img1[:, :,2 ]
IMG[:,0,:,:],IMG[:,1,:,:],IMG[:,2,:,:] = R,G,B
IMG = torch.tensor(IMG)
IMG = IMG.to(torch.float32)
#变成 maxpool需要的格式类型 (1,3,244,244)
'''传送到obesrve pool'''
out = vgg16.observe_pool(IMG)
'''数据维度重构,维度(3,x,x)转为(x,x,3),并可视化'''
plt.subplot(2,3,1)
plt.title('img_row')
plt.imshow(re_img1)
for index,data in enumerate(out):
data = data.numpy() # [1,3,244,244]
data = data.squeeze() # 3,244,244
R1,G1,B1 = data[0,:,:],data[1,:,:],data[2,:,:]
data = cv2.merge([R1,G1,B1]).astype('int')
plt.subplot(2,3,index+2)
plt.title(f'maxpool{index+1}:{data.shape}')
plt.imshow(data,cmap='gray')
plt.show()
2022/3/11日
后续可能更新的方向:深度学习网络传播过程的数据可视化
由于数据经过卷积和Relu激活函数,猜测可能需要重构数据的范围
将数据如何归化映射到【0,255】空间是个问题,
1.基于统计不变?
2.尺度不变特征变换?SIFT?
3.感觉可以借鉴图像质量评测里面的一些数学公式SROCC?SMSE?
才疏学浅,没有继续深入下去了。有时间继续更新
其他文章
Sober算子边缘检测与Harris角点检测1
决策树的实现与可视化
主成分分析,独立成分分析,+t-SNE 分布随机可视化降维的对比
线性回归预测波士顿房价
基于逻辑回归的鸢尾花分类
数据表示和特征工程
参考文献
Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[J]. arXiv preprint arXiv:1409.1556, 2014.