PV-RCNN论文和逐代码解析(二)
第一阶段:
1、MeanVFE (voxel特征编码)
2、VoxelBackBone8x(3D CNN 提取voxel特征)
3、HeightCompression(高度方向Z轴堆叠)
5、BaseBEVBackbone(SECOND中的RPN层)
6、AnchorHeadSingle(anchor分类和回归头)
4、VoxelSetAbstraction(VSA模块,对不同voxel特征层完成SA)
第二阶段:
7、PointHeadSimple Predicted Keypoint Weighting (PKW前背景权重加权)
8、PVRCNNHead(二阶proposal精调)
在PV-RCNN论文和逐代码解析(一)中,已经实现了上述模块的黑色部分,其与SECOND网络的实现大致相同,可以看我上篇文章:
PV-RCNN论文和逐代码解析(一)_NNNNNathan的博客-CSDN博客1、前言当前的点云3D检测主要分为两大类,第一类为grid-based的方法,第二类为point-based的方法。grid-based的方法将不规则的点云数据转换成规则的3D voxels (VoxelNet, SECOND , Fast PointRCNN, Part A^2 Net)或者转化成 2D的BEV特征图(PIXOR, HDNet,PointPillars),这种方法可以将不规则的数据转换后使用3D或者2D的CNN来高效的进行特征提取。...https://blog.csdn.net/qq_41366026/article/details/123349889?spm=1001.2014.3001.5502

其中第四点(VSA模块)与第一阶段的区域提议是分开的两条计算线;先完成对voxel的Set Abstraction操作后,再在第二阶段的box refinement中融合不同的特征来更好的定位bbox。
4、VoxelSetAbstraction
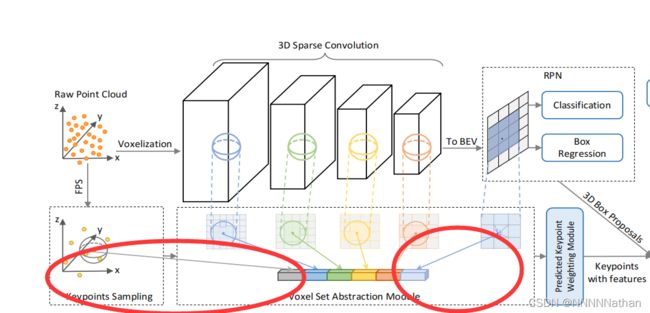
PV-RCNN在3D卷积的多层的voxel特整层上对voxel进行set abstraction操作,用一小部分关键点来编码整个场景,用于后续的proposal refinement network。
代码都在:pcdet/models/backbones_3d/pfe/voxel_set_abstraction.py
4.1 最远点采样FPS
为了让采样的一小部分关键点均匀分布在稀疏的点云中,首先对原始的点云数据进行了最远点采样(Furthest Point Sampling),其中KITTI数据集采样2048个关键点,Waymo数据集采样4096个关键点。
def get_sampled_points(self, batch_dict):
"""
Args:
batch_dict:
Returns:
keypoints: (N1 + N2 + ..., 4), where 4 indicates [bs_idx, x, y, z]
"""
batch_size = batch_dict['batch_size']
if self.model_cfg.POINT_SOURCE == 'raw_points':
# 取出所有原始点的xyz数据, shape (N_raw_point, 3) batch_id, x, y, z, r
src_points = batch_dict['points'][:, 1:4]
# 取出所有点对应的batch_id, shape (N_raw_point,)
batch_indices = batch_dict['points'][:, 0].long()
elif self.model_cfg.POINT_SOURCE == 'voxel_centers':
src_points = common_utils.get_voxel_centers(
batch_dict['voxel_coords'][:, 1:4],
downsample_times=1,
voxel_size=self.voxel_size,
point_cloud_range=self.point_cloud_range
)
batch_indices = batch_dict['voxel_coords'][:, 0].long()
else:
raise NotImplementedError
# 创建用于存储关键点的列表
keypoints_list = []
# 逐帧点云获取关键点
for bs_idx in range(batch_size):
# 得到属于当前帧的mask
bs_mask = (batch_indices == bs_idx)
# 索引出所有属于当前帧的点 shape (1, num_of_point, 3)
sampled_points = src_points[bs_mask].unsqueeze(dim=0) # (1, N, 3)
# 根据采样的模式,此处是最远点采样,
# 在KITTI中关键点个数为2048,在Waymo中关键点个数为4096
# cur_pt_idxs shape (1, 2048) 为关键点在原始点云中的索引
if self.model_cfg.SAMPLE_METHOD == 'FPS':
cur_pt_idxs = pointnet2_stack_utils.farthest_point_sample(
sampled_points[:, :, 0:3].contiguous(), self.model_cfg.NUM_KEYPOINTS
).long()
# 如果采样点数小于设置的采样点数,则重复采样至设置采样点数
if sampled_points.shape[1] < self.model_cfg.NUM_KEYPOINTS:
times = int(self.model_cfg.NUM_KEYPOINTS / sampled_points.shape[1]) + 1
non_empty = cur_pt_idxs[0, :sampled_points.shape[1]]
cur_pt_idxs[0] = non_empty.repeat(times)[:self.model_cfg.NUM_KEYPOINTS]
# 根据cur_pt_idxs取出当前帧的所有关键点 shape (1, 2048, 3)
keypoints = sampled_points[0][cur_pt_idxs[0]].unsqueeze(dim=0)
elif self.model_cfg.SAMPLE_METHOD == 'SPC':
cur_keypoints = self.sectorized_proposal_centric_sampling(
roi_boxes=batch_dict['rois'][bs_idx], points=sampled_points[0]
)
bs_idxs = cur_keypoints.new_ones(cur_keypoints.shape[0]) * bs_idx
keypoints = torch.cat((bs_idxs[:, None], cur_keypoints), dim=1)
else:
raise NotImplementedError
# 将当前帧中选取的关键点加入keypoints_list列表
keypoints_list.append(keypoints)
# 在第0维度将所有关键点进行拼接 (2048*batch_size, 3)
keypoints = torch.cat(keypoints_list, dim=0) # (B, M, 3) or (N1 + N2 + ..., 4)
# 将keypoints数据中该点所属帧 (batch_idx, x, y, z)
if len(keypoints.shape) == 3:
batch_idx = torch.arange(batch_size,
device=keypoints.device).view(-1, 1).repeat(1, keypoints.shape[1]).view(-1, 1)
keypoints = torch.cat((batch_idx.float(), keypoints.view(-1, 3)), dim=1)
return keypoints得到选取的关键点 shape : (batch*2048, 4) , 4-->batch_idx, x, y, z
4.2 3D CNN VSA
PV-RCNN中使用了PointNet++中提出的SA操作来对不同尺度上的voxel特征进行聚合。
在VoxelBackBone8x中,分别得到了1x,2x, 4x, 8x的voxel-wise feature volumes,VSA操作会分别在这些尺度的voxel-wise feature volumes上进行,得到4个尺度的voxel编码特征。如下图所示

VSA的实现与PointNet++的SA操作相同,只不过将操作对象从原始点云中的点换成了voxel-wise feature。
公式表述如下:

![]() 为经过3D CNN的第K层的voxel特征的集合
为经过3D CNN的第K层的voxel特征的集合
![]() 为voxel在第K层中的3D坐标,Nk是第K层中非空的voxel
为voxel在第K层中的3D坐标,Nk是第K层中非空的voxel
 为 每个voxel 特征在对应半径内关键点的相对位置信息
为 每个voxel 特征在对应半径内关键点的相对位置信息
对每一个关键点,首先确定他在第K层上,半径为R_k邻域内的非空voxel,将这些非空voxel组成voxel-wsie的特征向量集合;然后将不同尺度上相同关键点获取的voxel-wsie的特征向量拼接在一起,并使用一个简单的PointNet网络来融合该关键点不同尺度的特征,公式如下:

其中M(·)代表在k层中固定半径内voxel 特征集合中的随机采样操作,在实现中,每个集合中最大采样16或32个voxel-wise feature,节省计算资源;G(·)代表多层感知网络(MLP),来编码voxel-wise的特征和相对位置。max(·)操作取每个voxel set中特征最大的voxel-wise feature。
同时,每一层的R_k设置如下(单位:米),用于聚合不同的感受野信息:
1x : [0.4, 0.8] ,采样数[16, 16],MLP维度[[16, 16], [16, 16]]
2x : [0.8, 1.2],采样数[16, 32],MLP维度[[32, 32], [32, 32]]
3x : [1.2, 2.4],采样数[16, 32],MLP维度[[64, 64]], [64, 64]]
4x : [2.4, 4.8],采样数[16, 32],MLP维度[[64, 64], [64, 64]]
得到的特征为:

最终学习到的特征![]() 结合了基于3DCNN学习到的特征
结合了基于3DCNN学习到的特征![]() 和基于PointNet从voxel-wise SA中学习到的特征。
和基于PointNet从voxel-wise SA中学习到的特征。
4.3 Extended VSA
在对每层3D卷积的输出进行VSA操作后,为了能够是学习到的特征更加丰富,作者扩展了VSA模块;在原来VSA模块的特征上加上了来自原点的SA特征和来自堆叠后BEV视角的双线性插值特征,如下图所示
最终的公式如下:

加入Extended VSA的好处:
1、来自原点的SA操作可以弥补因为voxelization导致的量化损失
2、来自BEV视角的插值SA操作拥有更大的Z轴(高度)感受野
最终得到的特征![]() 具有很强的保存3D场景结构信息的能力:
具有很强的保存3D场景结构信息的能力:
[ (2048 * batch, 256) BEV视角下点特征数据 (2048 * batch, 32) 原始点云下特征数据 (2048 * batch, 32) x_conv1 第一次稀疏卷积后特征数据 (2048 * batch, 64) x_conv2 第二次稀疏卷积后特征数据 (2048 * batch, 128) x_conv3 第三次稀疏卷积后特征数据 (2048 * batch, 128) x_conv4 第四次稀疏卷积后特征数据 ]
G(·)网络结构:
Sequential( (0): Linear(in_features=640, out_features=128, bias=False) (1): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (2): ReLU() )
最终得到的关键点编码特征 维度 (batch*2048, 128)。
代码都在这个文件:pcdet/models/backbones_3d/pfe/voxel_set_abstraction.py
def forward(self, batch_dict):
"""
Args:
batch_dict:
batch_size:
keypoints: (B, num_keypoints, 3)
multi_scale_3d_features: {
'x_conv4': ...
}
points: optional (N, 1 + 3 + C) [bs_idx, x, y, z, ...]
spatial_features: optional
spatial_features_stride: optional
Returns:
point_features: (N, C)
point_coords: (N, 4)
"""
"""
===============================
通过最远点采样,获取每一帧点云的关键点
===============================
"""
keypoints = self.get_sampled_points(batch_dict)
"""
============================
Extended VSA中对BEV插值SA操作
============================
"""
point_features_list = []
if 'bev' in self.model_cfg.FEATURES_SOURCE:
# 通过对BEV的特征进行插值获取关键点的特征数据
point_bev_features = self.interpolate_from_bev_features(
# 所有的关键点
keypoints,
# 将高度进行堆叠后的BEV特征图
batch_dict['spatial_features'],
# batch size
batch_dict['batch_size'],
# 高度堆叠后的BEV特征图的下采样倍数,默认是8倍
bev_stride=batch_dict['spatial_features_stride']
)
# 将插值得到的关键点特征存入列表
point_features_list.append(point_bev_features)
# batch_size
batch_size = batch_dict['batch_size']
# 取出所有关键点的xyz坐标
new_xyz = keypoints[:, 1:4].contiguous()
# 存储每帧点云关键点的个数
new_xyz_batch_cnt = new_xyz.new_zeros(batch_size).int()
# 获取batch中每帧点云中关键点的个数
for k in range(batch_size):
new_xyz_batch_cnt[k] = (keypoints[:, 0] == k).sum()
"""
所有SA层的配置中MLPS为1*1的卷积,DOWNSAMPLE_FACTOR该层对应的下采样倍数
"""
"""
============================
Extended VSA中对原始点云的操作
============================
POOL_RADIUS为该层对应的采样半径,
NSAMPLE为半径内最大的采样点数
SA_LAYER:
raw_points:
MLPS: [[16, 16], [16, 16]]
POOL_RADIUS: [0.4, 0.8]
NSAMPLE: [16, 16]
============================
"""
if 'raw_points' in self.model_cfg.FEATURES_SOURCE:
# 得到所有一批数据中所有原始点云数据 shape (N, 5) batch_id, x, y, z, r
raw_points = batch_dict['points']
# pooled_features: (2048 * batch, 32)
pooled_features = self.aggregate_keypoint_features_from_one_source(
# batch size
batch_size=batch_size,
# 聚合函数,这里采用PointNet++的Set Abstraction
aggregate_func=self.SA_rawpoints,
# 原始点的xyz数据
xyz=raw_points[:, 1:4],
# 每个原始点云的 reflect intensity
xyz_features=raw_points[:, 4:].contiguous() if raw_points.shape[1] > 4 else None,
# 每个点所在batch中的索引
xyz_bs_idxs=raw_points[:, 0],
# 关键点的xyz shape : (2048, 3)
new_xyz=new_xyz,
# 一批数据中关键点的个数
new_xyz_batch_cnt=new_xyz_batch_cnt,
# False
filter_neighbors_with_roi=self.model_cfg.SA_LAYER['raw_points'].get('FILTER_NEIGHBOR_WITH_ROI', False),
# None
radius_of_neighbor=self.model_cfg.SA_LAYER['raw_points'].get('RADIUS_OF_NEIGHBOR_WITH_ROI', None),
# None
rois=batch_dict.get('rois', None)
)
point_features_list.append(pooled_features)
"""
====================================
VSA中对不同尺度3D CNN的voxel-wise的操作
1x, 2x, 4x, 8x
====================================
POOL_RADIUS为该层对应的采样半径,
NSAMPLE为半径内最大的采样点数
x_conv1:
DOWNSAMPLE_FACTOR: 1
MLPS: [[16, 16], [16, 16]]
POOL_RADIUS: [0.4, 0.8]
NSAMPLE: [16, 16]
x_conv2:
DOWNSAMPLE_FACTOR: 2
MLPS: [[32, 32], [32, 32]]
POOL_RADIUS: [0.8, 1.2]
NSAMPLE: [16, 32]
x_conv3:
DOWNSAMPLE_FACTOR: 4
MLPS: [[64, 64], [64, 64]]
POOL_RADIUS: [1.2, 2.4]
NSAMPLE: [16, 32]
x_conv4:
DOWNSAMPLE_FACTOR: 8
MLPS: [[64, 64], [64, 64]]
POOL_RADIUS: [2.4, 4.8]
NSAMPLE: [16, 32]
=====================================
"""
for k, src_name in enumerate(self.SA_layer_names):
# 获取非空voxel的xyz的index shape : (16000*batch, 4)
# 16000为训练中选取的最大非空voxel数
# 4-->(batch_idx, z, y, x)
cur_coords = batch_dict['multi_scale_3d_features'][src_name].indices
# 获取非空voexel的特征
cur_features = batch_dict['multi_scale_3d_features'][src_name].features.contiguous()
# 获取每个voxel在点云坐标系中xyz的中心点坐标 (16000*batch, 3)
xyz = common_utils.get_voxel_centers(
cur_coords[:, 1:4], downsample_times=self.downsample_times_map[src_name],
voxel_size=self.voxel_size, point_cloud_range=self.point_cloud_range
)
# VSA操作
pooled_features = self.aggregate_keypoint_features_from_one_source(
# batch_size
batch_size=batch_size,
# 第K层上的SA网络
aggregate_func=self.SA_layers[k],
# 所有voxel在点云坐标系下中心点的坐标
xyz=xyz.contiguous(),
# 所有voxel在第K层的特征
xyz_features=cur_features,
# 所有点在batch中的mask
xyz_bs_idxs=cur_coords[:, 0],
# 关键点坐标 (2048, 3)
new_xyz=new_xyz,
# 关键点个数
new_xyz_batch_cnt=new_xyz_batch_cnt,
# False
filter_neighbors_with_roi=self.model_cfg.SA_LAYER[src_name].get('FILTER_NEIGHBOR_WITH_ROI', False),
# None
radius_of_neighbor=self.model_cfg.SA_LAYER[src_name].get('RADIUS_OF_NEIGHBOR_WITH_ROI', None),
# None
rois=batch_dict.get('rois', None)
)
# 得到的pooled_features 维度为 (2048 * batch, C)
point_features_list.append(pooled_features)
"""
[
(2048 * batch, 256) BEV视角下点特征数据
(2048 * batch, 32) 原始点云下特征数据
(2048 * batch, 32) x_conv1 第一次稀疏卷积后特征数据
(2048 * batch, 64) x_conv2 第二次稀疏卷积后特征数据
(2048 * batch, 128) x_conv3 第三次稀疏卷积后特征数据
(2048 * batch, 128) x_conv4 第四次稀疏卷积后特征数据
]
"""
# point_features (2048 * batch, 640)
point_features = torch.cat(point_features_list, dim=-1)
batch_dict['point_features_before_fusion'] = point_features.view(-1, point_features.shape[-1])
"""
将不同尺度拼接的特征使用一个简单的MLP网络对处在不同尺度的特征进行聚合
vsa_point_feature_fusion
Sequential(
(0): Linear(in_features=640, out_features=128, bias=False)
(1): BatchNorm1d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
"""
# point_features (2048 * batch, 640)-->(2048 * batch, 128)
point_features = self.vsa_point_feature_fusion(point_features.view(-1, point_features.shape[-1]))
# (batch*2048, C)
batch_dict['point_features'] = point_features
# (batch*2048, 4) 4-->(batch_id, x, y, z)
batch_dict['point_coords'] = keypoints
return batch_dict
BEV视角插值代码:
# 获取从BEV视角通过插值得到的关键点特征
def interpolate_from_bev_features(self, keypoints, bev_features, batch_size, bev_stride):
"""
Args:
keypoints: (N1 + N2 + ..., 4)
bev_features: (B, C, H, W)
batch_size:
bev_stride:
Returns:
point_bev_features: (N1 + N2 + ..., C)
"""
# 得到该关键点对应的voxel的x坐标 shape : (2048*batch,)
x_idxs = (keypoints[:, 1] - self.point_cloud_range[0]) / self.voxel_size[0]
# 得到该关键点对应的voxel的y坐标 shape : (2048*batch,)
y_idxs = (keypoints[:, 2] - self.point_cloud_range[1]) / self.voxel_size[1]
# x坐标除下采样倍数 shape : (2048*batch,)
x_idxs = x_idxs / bev_stride
# y坐标除下采样倍数 shape : (2048*batch,)
y_idxs = y_idxs / bev_stride
# 结果列表
point_bev_features_list = []
for k in range(batch_size): # 逐帧进行插值操作
bs_mask = (keypoints[:, 0] == k) # 当前帧点云的mask
cur_x_idxs = x_idxs[bs_mask] # 取出属于当前帧关键点的x坐标
cur_y_idxs = y_idxs[bs_mask] # 取出属于当前帧关键点的y坐标
# 对当前帧的BEV特征图进行维度转换 (C, 200, 176) --> (200, 176, C)
cur_bev_features = bev_features[k].permute(1, 2, 0)
# 通过双线性插值获得关键点的特征 shape (2048, C)
point_bev_features = bilinear_interpolate_torch(cur_bev_features, cur_x_idxs, cur_y_idxs)
# 结果放入列表中
point_bev_features_list.append(point_bev_features)
# 将通过插值得到的关键点特征在第0维度进行拼接 (2048*batch, C)
point_bev_features = torch.cat(point_bev_features_list, dim=0) # (N1 + N2 + ..., C)
return point_bev_features5、PointHeadSimple Predicted Keypoint Weighting
在将不同尺度的场景都编码到N个关键点后,将会在后面的精调阶段使用到这些关键点的特征,但是这些被最远点采样(FPS)算法选取出来的关键点是均匀的分布在点云中的,这就意味着有一部分的关键点并没有落在GT_box内,他们就代表了背景;作者在这里认为,属于前景的关键定应该主导box的精调,所以作者在这里加入了PKW模块用于预测改关键点属于前景点还是背景点。
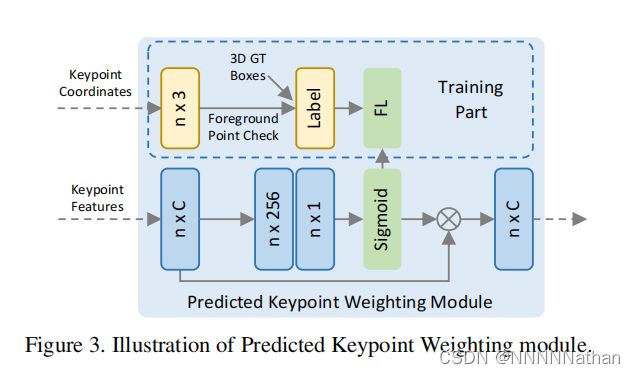
PKW模块用于调整前背景点的权重方式来实现,其中对于前背景点的分割GT值,由于在自动驾驶场景的数据集中所有的3D物体都是独立的,不会像图片中物体overlap的情况,可以直接判断一个点是否在3Dbox内即可得到前背景的类别,权重调整公式如下:
A(·)是一个三层的多层感知机,最终接上一个sigmoid函数来判断该点的属于前景的置信度。
由于3D场景中前背景点的数量过于不均衡,PKW模块使用Focal Loss进行训练,Focal Loss的alpha,gamma参数设置与RetinaNet一直,alpha为0.25,gamma为2
注:对于点前背景分割,PV-RCNN与PointRCNN中设置一直,对每个GTBox扩大0.2m,判断是否有关键点落在GTBox边沿,并将这个处于边沿的GTBox点不进行loss计算。
5.1 PKW模块
代码在:pcdet/models/dense_heads/point_head_simple.py
def forward(self, batch_dict):
"""
Args:
batch_dict:
batch_size:
point_features: (N1 + N2 + N3 + ..., C) or (B, N, C)
point_features_before_fusion: (N1 + N2 + N3 + ..., C)
point_coords: (N1 + N2 + N3 + ..., 4) [bs_idx, x, y, z]
point_labels (optional): (N1 + N2 + N3 + ...)
gt_boxes (optional): (B, M, 8)
Returns:
batch_dict:
point_cls_scores: (N1 + N2 + N3 + ..., 1)
point_part_offset: (N1 + N2 + N3 + ..., 3)
"""
# 这里取出vsa_point_feature_fusion之前的特征 shape : (batch * 2048, 640)
if self.model_cfg.get('USE_POINT_FEATURES_BEFORE_FUSION', False):
point_features = batch_dict['point_features_before_fusion']
else:
point_features = batch_dict['point_features']
"""
前背景分类的MLP设置
Sequential(
(0): Linear(in_features=640, out_features=256, bias=False)
(1): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Linear(in_features=256, out_features=256, bias=False)
(4): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU()
(6): Linear(in_features=256, out_features=1, bias=True)
)
"""
# point_cls_preds shape : (batch * 2048, 1)
point_cls_preds = self.cls_layers(point_features)
ret_dict = {
'point_cls_preds': point_cls_preds,
}
# 将预测结果用sigmoid函数映射到0-1之间,得到前背景分类概率
# PKW模块的权重调整会在PVRCNNHead模块中进行,将预测结果放入batch_dict
point_cls_scores = torch.sigmoid(point_cls_preds)
batch_dict['point_cls_scores'], _ = point_cls_scores.max(dim=-1)
# 训练模型下,需要对关键点预测进行target assignment, 前景为1, 背景为0
if self.training:
targets_dict = self.assign_targets(batch_dict)
# 存储所有关键点属于前背景的mask
ret_dict['point_cls_labels'] = targets_dict['point_cls_labels']
self.forward_ret_dict = ret_dict
return batch_dict5.2 关键点的target assignment
代码在:pcdet/models/dense_heads/point_head_template.py
def assign_stack_targets(self, points, gt_boxes, extend_gt_boxes=None,
ret_box_labels=False, ret_part_labels=False,
set_ignore_flag=True, use_ball_constraint=False, central_radius=2.0):
"""
Args:
points: (N1 + N2 + N3 + ..., 4) [bs_idx, x, y, z]
gt_boxes: (B, M, 8)
extend_gt_boxes: [B, M, 8]
ret_box_labels: True
ret_part_labels: Fasle
set_ignore_flag: True
use_ball_constraint: False
central_radius:
Returns:
point_cls_labels: (N1 + N2 + N3 + ...), long type, 0:background, -1:ignored
point_box_labels: (N1 + N2 + N3 + ..., code_size)
"""
assert len(points.shape) == 2 and points.shape[1] == 4, 'points.shape=%s' % str(points.shape)
assert len(gt_boxes.shape) == 3 and gt_boxes.shape[2] == 8, 'gt_boxes.shape=%s' % str(gt_boxes.shape)
assert extend_gt_boxes is None or len(extend_gt_boxes.shape) == 3 and extend_gt_boxes.shape[2] == 8, \
'extend_gt_boxes.shape=%s' % str(extend_gt_boxes.shape)
assert set_ignore_flag != use_ball_constraint, 'Choose one only!'
# 得到一批数据中batch_size的大小,以方便逐帧完成target assign
batch_size = gt_boxes.shape[0]
# 得到一批数据中所有点云的batch_id
bs_idx = points[:, 0]
# 初始化每个点云的类别,默认全0属于背景; shape (batch * 16384)
point_cls_labels = points.new_zeros(points.shape[0]).long()
# 初始化每个点云预测box的参数,默认全0; shape (batch * 16384, 8)
point_box_labels = gt_boxes.new_zeros((points.shape[0], 8)) if ret_box_labels else None
# None
point_part_labels = gt_boxes.new_zeros((points.shape[0], 3)) if ret_part_labels else None
# 逐帧点云数据进行处理
for k in range(batch_size):
# 得到一个mask,用于取出一批数据中属于当前帧的点
bs_mask = (bs_idx == k)
# 取出对应的点shape (16384, 3), PV-RCNN关键点(2048, 3)
points_single = points[bs_mask][:, 1:4]
# 初始化当前帧中点的类别,默认为0背景, (16384, ), PV-RCNN关键点(2048,)
point_cls_labels_single = point_cls_labels.new_zeros(bs_mask.sum())
"""PV-RCNN中点的数量是2048或者4096
points_single : (16384, 3) --> (1, 16384, 3)
gt_boxes : (batch, num_of_GTs, 8) --> (当前帧的GT, num_of_GTs, 8)
box_idxs_of_pts : (16384, ),其中点云分割中背景为-1, 前景点指向GT中的索引,
例如[-1,-1,3,20,-1,0],其中,3,20,0分别指向第3个、第20个和第0个GT
"""
# 计算哪些中点在GTbox, box_idxs_of_pts
box_idxs_of_pts = roiaware_pool3d_utils.points_in_boxes_gpu(
points_single.unsqueeze(dim=0), gt_boxes[k:k + 1, :, 0:7].contiguous()
).long().squeeze(dim=0)
# mask 表明该帧中的哪些点属于前景点,哪些点属于背景点;得到属于前景点的mask
box_fg_flag = (box_idxs_of_pts >= 0)
# 是否忽略在enlarge box中的点 True
if set_ignore_flag:
# 计算哪些点在GTbox_enlarge中
extend_box_idxs_of_pts = roiaware_pool3d_utils.points_in_boxes_gpu(
points_single.unsqueeze(dim=0), extend_gt_boxes[k:k + 1, :, 0:7].contiguous()
).long().squeeze(dim=0)
# GTBox内的点
fg_flag = box_fg_flag
# ^为异或运算符,不同为真,相同为假,这样就可以得到哪些点在GT enlarge中了
ignore_flag = fg_flag ^ (extend_box_idxs_of_pts >= 0)
# 将这些真实GT边上的点设置为-1 loss计算时,不考虑这类点
point_cls_labels_single[ignore_flag] = -1
elif use_ball_constraint:
box_centers = gt_boxes[k][box_idxs_of_pts][:, 0:3].clone()
box_centers[:, 2] += gt_boxes[k][box_idxs_of_pts][:, 5] / 2
ball_flag = ((box_centers - points_single).norm(dim=1) < central_radius)
fg_flag = box_fg_flag & ball_flag
else:
raise NotImplementedError
# [box_idxs_of_pts[fg_flag]]取出所有点中属于前景的点,
# 并为这些点分配对应的GT_box shape (num_of_gt_match_by_points, 8)
# 8个维度分别是x, y, z, l, w, h, heading, class_id
gt_box_of_fg_points = gt_boxes[k][box_idxs_of_pts[fg_flag]]
# 将类别信息赋值给对应的前景点 (16384, )
point_cls_labels_single[fg_flag] = 1 if self.num_class == 1 else gt_box_of_fg_points[:, -1].long()
# 赋值点的类别GT结果到的batch中对应的帧位置
point_cls_labels[bs_mask] = point_cls_labels_single
# 如果该帧中GT的前景点的数量大于0且需要预测每个点的box PV-RCNN中不需要,PointRCNN中需要
if ret_box_labels and gt_box_of_fg_points.shape[0] > 0:
# 初始化该帧中box的8个回归参数,并置0
# 此处编码为(Δx, Δy, Δz, dx, dy, dz, cos(heading), sin(heading)) 8个
point_box_labels_single = point_box_labels.new_zeros((bs_mask.sum(), 8))
# 对属于前景点的box进行编码 得到的是 (num_of_fg_points, 8)
# 其中8是(Δx, Δy, Δz, dx, dy, dz, cos(heading), sin(heading))
fg_point_box_labels = self.box_coder.encode_torch(
gt_boxes=gt_box_of_fg_points[:, :-1], points=points_single[fg_flag],
gt_classes=gt_box_of_fg_points[:, -1].long()
)
# 将每个前景点的box信息赋值到该帧中box参数预测中
# fg_point_box_labels: (num_of_GT_matched_by_point,8)
# point_box_labels_single: (16384, 8)
point_box_labels_single[fg_flag] = fg_point_box_labels
# 赋值点的回归编码结果到的batch中对应的帧位置
point_box_labels[bs_mask] = point_box_labels_single
# False
if ret_part_labels:
point_part_labels_single = point_part_labels.new_zeros((bs_mask.sum(), 3))
transformed_points = points_single[fg_flag] - gt_box_of_fg_points[:, 0:3]
transformed_points = common_utils.rotate_points_along_z(
transformed_points.view(-1, 1, 3), -gt_box_of_fg_points[:, 6]
).view(-1, 3)
offset = torch.tensor([0.5, 0.5, 0.5]).view(1, 3).type_as(transformed_points)
point_part_labels_single[fg_flag] = (transformed_points / gt_box_of_fg_points[:, 3:6]) + offset
point_part_labels[bs_mask] = point_part_labels_single
# 将每个点的类别、每个点对应box的7个回归参数放入字典中
targets_dict = {
# 将一个batch中所有点的GT类别结果放入字典中 shape (batch * 16384)
'point_cls_labels': point_cls_labels,
# 将一个batch中所有点的GT_box编码结果放入字典中 shape (batch * 16384) shape (batch * 16384, 8)
'point_box_labels': point_box_labels,
# None
'point_part_labels': point_part_labels
}
return targets_dict6、PVRCNNHead(二阶proposal精调)
在第VSA模块中,已经一帧点云场景编码到一小部分拥有多尺度语义信息的关键点特征中,同时,也由BEV视角下生成了很多3D的proposal(ROI);在第二阶段的refinement过程中,需要将来自ROI的特征融合关键点的特征,提升最终box预测的准确度和泛化性。
作者在这里提出了基于SA操作的keypoint-to-grid ROI feature abstraction,用于多尺度的ROI特征的编码。
对于一个3D ROI,
