工业相机介绍
工 业 相 机 介 绍 工业相机介绍 工业相机介绍
相机,是机器视觉系统的重要组成部分,其最本质的功能就是通过CCD或CMOS成像传感器,将镜头接收的光信号转变为有序的电信号,并将这些信息通过,相应接口,传送到计算机主机。
一 工业相机的分类
| 类别 | 介绍1 | 介绍2 |
|---|---|---|
| Mono & RGB | 黑白:工业最常用的模式,图像的还原度高 | 彩色:可以分辨颜色信息 |
| Analog & Digital | 模拟: 图像质量差,容易被干扰,需要图像采集卡 | 数字: 图像质量好 |
| CCD & CMOS | CCD :图像质量好 | CMOS:速度快,经济性好 |
| Area & Line | 面阵:拍摄的是一整幅画面(4:3) | 线阵:拍摄的是一条线,通过移动机构来实现整个画幅的采像。(1024*1) |
| 智能相机 | 智能相机是集高速微处理器、内存、程序存储、图像采集、图像处理为一体的工业相机。从而提供了具有多功能、模块化、高可靠性、易于实现的机器视觉解决方案,开发速度快,可以适应于大部分项目。比较有名的有NI、基恩士、康耐视等厂商。 | 缺点是其集成的ARM、DSP、FPGA等性能不如高端桌面型CPU,并且智能相机编程函数比较固定,开发空间小,不如基于PC (PC base)的相机灵活度高。 |

在接受光照之后,感光元件(感光二极管PD: photodiode)产生对应的电流,电流大小与光强对应,因此感光元件直接输出的电信号是模拟的。
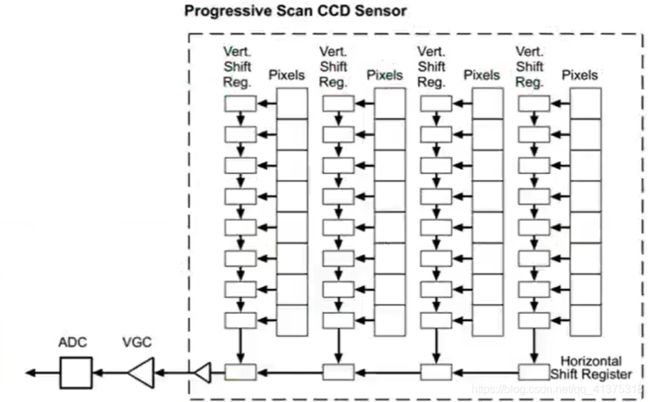
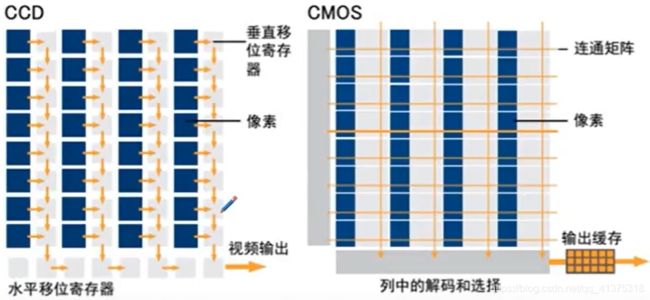
CCD与CMOS图像传感器光电转换的原理相同,他们最主要的差别在于信号的读出过程不同。
在CCD芯片中,光敏像素的电荷发生移位并被转化为信号。像素电荷产生于对半导体的曝光,在许多非常小的移位操作(垂直和水平移位寄存器)的支持下(类似于“斗链”),被传输到中央模数转换器。由芯片中的电极所产生的电场推动电荷的传输。
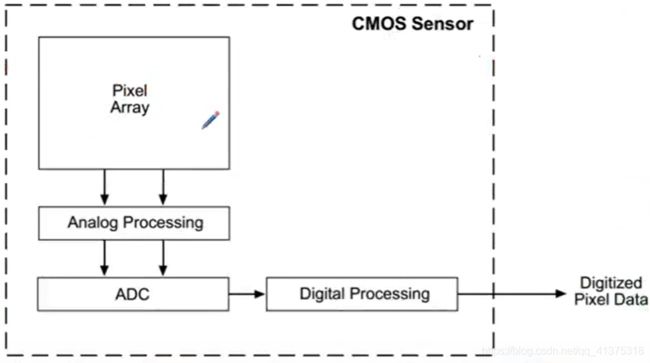
在CMOS芯片中,并行于每个像素放置了存储电荷的电容。当每个像素曝光时,这个电容器被光电电流充电。电容器中产生的电压与亮度和曝光时间成正比。不同于CCD,因芯片曝光而由电容捕获的电子不会移位到单个输出放大器,而是会通过每个像素自己的关联电子电路直接转化为可测量的电压。然后,这个电压可用于模拟信号处理器。
成像质量:
- CCD统一输出放大,CMOS在单个像素上完成放大,从像素点来看,用于感光的区域要远大于CMOS,毕竟CMOS上还安装许多复杂的电路,所以CCD的画质,的确比CMOS好。
- CCD放大一致性高,成像质量较好。
集成度:
- CMOS芯片能将图像信号放大器、信号读取电路、A/D转换电路、图像信号处理器及控制器等集成到一块芯片上, 只需一块芯片就可以实现相机的的所有基本功能,集成度很高,芯片级相机概念就是从这产生的。
- 随着CMOS成像技术的不断发展,有越来越多的公司可以提供高品质的CMOS成像芯片。
速度:
CCD采用逐个光敏输出,只能按照规定的程序输出,速度较慢。CMOS有多个电荷-电压转换器和行列开关控制,读出速度快很多,目前大部分500fps以上的高速相机都是CMOS相机

二 相机性能
1.感光度:感光度越大,所需的补光越少。但因为光源往往成本较低,通常只有因安装环境限制无法使用光源时才选择高灵敏度的相机。如果相机只能使用很短的曝光时间(如高帧速率),此时也需要使用高感光度的相机。
2.动态范围:大动态范围可以在各种光照条件下获得良好的图像,并显示出非常黑暗和明亮场景下的图像细节。具有此功能的相机经常被宣传为HDR 或 WDR(高或宽动态范围)
3.信噪比:相机的噪声等级应该低于可识别的信号。此属性在光线较暗的情况下尤为重要。
从技术发展趋势看,CMOS芯片应该是未来的方向。因为CMOS芯片近年来在面阵相机和线阵相机的两个重要参数(图像速率和噪声等级)方面取得巨大的进步。自2015年初开始,官方已确认CMOs技术将在未来成为主流技术。
三 黑白相机
物体在有光线照射到它时将会产生反射,这些反射光线进入镜头光圈照射在CCD芯片上,在各个单元中生成电子。
曝光结束后,这些电子被从CCD芯片中读出,并由相机内部的微处理器进行初步处理。此时由该微处理器输出的就是一幅数字图像了。
这种方式得到的像素中的数字信号是真实可靠的,因此黑白相机成像质量通常会很好。

四 彩色相机
CCD芯片将光子转换为电子,在这一过程当中,光子数目与电子数目互成比例。但光子还有另外一个特征值——波长,而这条信息却没有在这个过程中被转换为电子。
因此,CCD芯片无法识别颜色。
如果我们需要相机内的图像处理单元在每个像素上都输出红、绿和蓝三种颜色分量的值,就必须给这三种基色中的每种颜色都配置一个CCD。
每个CCD都只得到过滤后一个颜色分量的光子,即一个CCD用于红光,一个用于绿光,一个用于蓝光。我们用三棱镜将这三种颜色分离开来。

如果考虑到价格因素,我们只能使用一个CCD芯片,那么我们就得把彩色滤光片象马赛克一样分布在cCD所有的像素上。这一概念也被称为马赛克滤光片或拜尔滤光片。
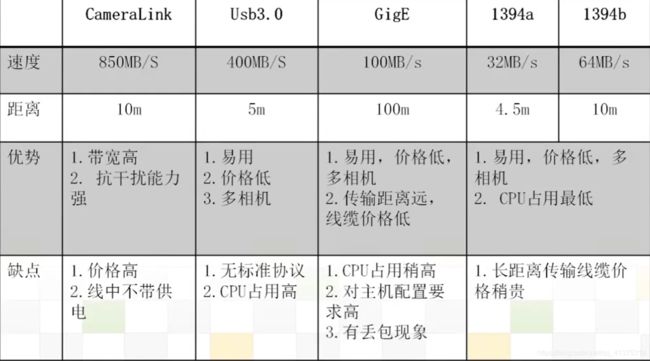
五 工业相机的通讯接口类型

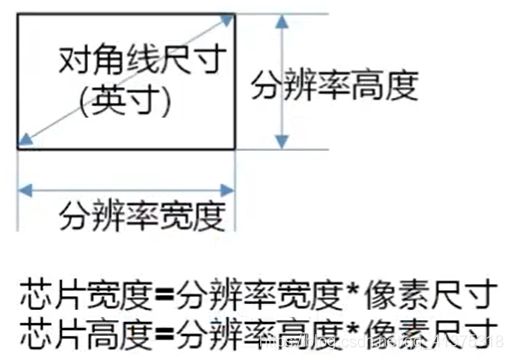
六 芯片尺寸计算
七 曝光方式
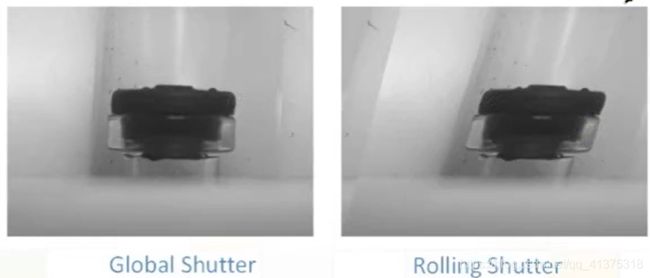

全局曝光((Global Shutter) :整个芯片同时曝光(CCD)
卷帘曝光( Rolling Shutter) :逐行滚动曝光( CMOS)
在抓拍快速运动的物体是,卷帘快门的方式会产生图像斜变。因此卷帘快门更适合静止拍摄,而对高速抓拍的场合需要使用全局曝光的芯片。
八 像素精度计算(选择相机)
像素精度(宽)=视野宽/分辨率宽度
像素精度(高)=视野高/分辨率高度
九 相机主要参数介绍
| 参数 | 介绍 |
|---|---|
| 感光芯片型号 | 感光芯片决定了,相机的分辨率、像素精度和曝光方式。 |
| 帧率 | 每秒钟可以捕捉的最大的画幅数,和图像的大小和通讯的速度有关。帧:相机每秒最多可以拍摄的照片张数 |
| 增益–ISO | 信号放大倍率。增益越大,图像越亮,但是噪点也越多。 |
| 曝光时间 | 曝光时间越大拍摄的照片越亮,但是对运动的物体来说,过大的曝光时间会产生径向模糊。 |
| 采像模式(实时、触发、单帧) | 实时:按照相机的设定帧率自由采集图像。触发:外部触发信号接入,控制相机曝光。(5<=V<24) 单帧:又叫软触发。通过软件触发相机拍摄一帧图像。 |
| 触发延时 | 从相机接收到触发信号到开始曝光的时间。 |
| ROI/AOI(Region of Interest/Area of Interest) | 感兴趣区域,可以使用感光芯片的一部分作为有效的图像。可以去除多余的图像区域,减少像素量,提高帧率和运算速度。 |
十 相机常用功能
| 功能 | 介绍 |
|---|---|
| 像素融合(Binning) | Binning是一种图像读出模式,将相邻像元感应的电荷加在一益,提高色起,以一个像素的模式读出。 |
| POE (Power Over Ethernet) | 以太网供电,可以省去外部电源线。但同时也少了外部IO控制,如触发频闪功能。 |
| 频闪 | 相机的IO信号线中有自带的频闪输出信号,可以控制工业光源的进行频闪曝光。 |
| 颜色增益 | 针对彩色相机,可分别对R、G、B每个通道设定增彩的对比度。 |
| LUT | 输入灰度值和输出灰度值的传递关系,可以通过设定LUT来控制图像的灰度范围和图像对比度 |
| HDR | 通过多组不同的曝光参数来实现不同亮度范围内的拍摄,最后合成一张图。针对采像范围内明暗变化特别大的情况。 |


十一 选型练习

十二 线阵相机
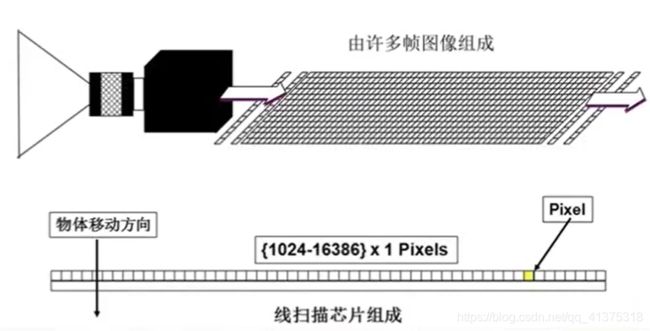
线阵相机成像原理
线阵相机也称线扫描相机,线阵CCD工业相机的传感器仅是由一行或者多行感光芯片构成的,拍照时需要通过机械运动,形成相对运动,才能得到想要的图像。线阵相机的常用分辨率为1k,2k,4k,8k,12k,16k ,即一行的像素数量。
十三 面阵和线阵相机
面阵相机芯片是MN方式排

线阵相机芯片是1N方式

线阵相机
- 线扫描传感器通常有1或2行的像素
- 垂直大小不受传感器尺寸限制
- 下一行时被以前的线转移(并联)
- 水平分辨率高达16384像素
- 需要移动产品或相机
面阵相机
- 面阵相机有多行像素,通常为4 :3的尺寸
- 垂直大小受传感器尺寸限制
- 获取新的图像–限制于帧速率
- 水平分辨率高达5344像素
- 产品可以是固定的
大视野,高精度的应用选用线阵相机。
十四 相机选型(练习)
