从零开始实现yolox二:网络搭建与导入
网络结构
- 1 YOLOX网络结构概览
- 2 Backbone
- 3 Neck
- 4 Head
- 5 YOLOBody
- 6 权重导入
-
- (1)下载模型权重文件
- (2)解析模型
- (3)导入模型
这篇博客是YOLOX系列中最核心的,也是让人越看越明白的。各个模型最大的区别就是网络结构,其次是损失函数,其他的数据增强、mAP值的计算都是一样的。
1 YOLOX网络结构概览
当然,还有更接近代码的版本:
2 Backbone
再yolox_from_scratch下新建一个名为nets的程序包,并再下面新建一个名为darknet.py的文件,新建后项目结构如下:
在darknet.py文件中,我们构建backbone的网络结构。
首先是激活函数:
import torch
from torch import nn
class SiLU(nn.Module): # 其实pytorch1.7以后的版本集成了silu激活函数,可以直接通过nn.SiLU调用,但这里我们按原版代码
@staticmethod # 静态方法,在此之后可以通过类名调用该函数
def forward(x):
return x * torch.sigmoid(x)
def get_activation(name="silu", inplace=True):
"""
获取激活函数
Args:
name:激活函数的名称
inplace:是否对输入进行原地替换,原地替换指的是将运算结果写回输入变量然后返回,
达到节约内存/显存的目的,详情可看:https://blog.csdn.net/manmanking/article/details/104830822
因为激活函数输入的往往不是图片,而是卷积之后的结果,因此不会对图片产生影响。
Returns:
"""
if name == "silu":
module = SiLU()
elif name == "relu":
module = nn.ReLU(inplace=inplace)
elif name == "lrelu":
module = nn.LeakyReLU(0.1, inplace=inplace)
else:
raise AttributeError("Unsupported act type: {}".format(name))
return module
然后是基本的卷积模块:
class BaseConv(nn.Module):
"""基本的卷积模块,CBA,即 Conv+BN+Activation """
def __init__(self, in_channels, out_channels, ksize, stride, groups=1, bias=False, act="silu"):
"""
Args:
in_channels: 输入通道
out_channels: 输出通道
ksize: 卷积核尺寸
stride: 卷积步长
groups: 分组卷积的组数,关于分组卷积可以看这个:https://blog.csdn.net/qq_34243930/article/details/107231539
bias:
act:
"""
super().__init__()
pad = (ksize - 1) // 2
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=ksize, stride=stride, padding=pad, groups=groups,
bias=bias)
self.bn = nn.BatchNorm2d(out_channels)
self.act = get_activation(act, inplace=True)
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def fuseforward(self, x):
return self.act(self.conv(x))
接下来是基本的卷积块,它由卷积Conv、标准化BN、激活函数Activation 三个模块构成,简称CBA,CBA又可以根据激活函数的不同分为CBS和CBL,前者的激活函数是SiLU,后者为ReLU。基本卷积块的代码如下:
class BaseConv(nn.Module):
"""基本的卷积模块,CBA,即 Conv+BN+Activation """
def __init__(self, in_channels, out_channels, ksize, stride, groups=1, bias=False, act="silu"):
"""
Args:
in_channels: 输入通道
out_channels: 输出通道
ksize: 卷积核尺寸
stride: 卷积步长
groups: 分组卷积的组数,关于分组卷积可以看这个:https://blog.csdn.net/qq_34243930/article/details/107231539
bias:
act:
"""
super().__init__()
pad = (ksize - 1) // 2
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=ksize, stride=stride, padding=pad, groups=groups,
bias=bias)
self.bn = nn.BatchNorm2d(out_channels)
self.act = get_activation(act, inplace=True)
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def fuseforward(self, x):
return self.act(self.conv(x))
依据BaseConv模块,可以构建YOLOX中的另一个基础模块:DWConv,它可以用来做下采样。
下采样有两种:“3x3卷积” 和 “3x3+1x1卷积”,后者的参数量相比前者明显减少,这就是DWConv的作用,具体代码如下:
class DWConv(nn.Module):
"""组合卷积模块"""
def __init__(self, in_channels, out_channels, ksize, stride=1, act="silu"):
super().__init__()
self.dconv = BaseConv(in_channels, in_channels, ksize=ksize, stride=stride, groups=in_channels, act=act, )
self.pconv = BaseConv(in_channels, out_channels, ksize=1, stride=1, groups=1, act=act) # 1x1卷积
def forward(self, x):
x = self.dconv(x)
return self.pconv(x)
接下来是Focus模块:
class Focus(nn.Module):
"""Focus模块,只使用一次"""
def __init__(self, in_channels, out_channels, ksize=1, stride=1, act="silu"):
super().__init__()
self.conv = BaseConv(in_channels * 4, out_channels, ksize, stride, act=act)
def forward(self, x):
patch_top_left = x[..., ::2, ::2]
patch_bot_left = x[..., 1::2, ::2]
patch_top_right = x[..., ::2, 1::2]
patch_bot_right = x[..., 1::2, 1::2]
x = torch.cat((patch_top_left, patch_bot_left, patch_top_right, patch_bot_right,), dim=1, )
return self.conv(x)
再往下是Bottleneck模块,其用来构建CSP模块
class Bottleneck(nn.Module):
def __init__(self, in_channels, out_channels, shortcut=True, expansion=0.5, depthwise=False, act="silu", ):
"""
Args:
in_channels: 输入通道
out_channels: 输出通道
shortcut: 是否进行短连接
expansion:隐藏层的通道数与输出层的比例
depthwise:是否使用更深的网络进行下采样(若使用更深的网络,则是DWConv,否则BaseConv)
act:激活函数
"""
super().__init__()
hidden_channels = int(out_channels * expansion)
Conv = DWConv if depthwise else BaseConv
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
self.conv2 = Conv(hidden_channels, out_channels, 3, stride=1, act=act)
self.use_add = shortcut and in_channels == out_channels
def forward(self, x):
y = self.conv2(self.conv1(x))
if self.use_add:
y = y + x
return y
有了Bottleneck模块,就可以写CSP模块了:
class CSPLayer(nn.Module):
def __init__(self, in_channels, out_channels, n=1, shortcut=True, expansion=0.5, depthwise=False, act="silu", ):
"""
Args:除了n,其他参数都和 Bottleneck 一样
in_channels:
out_channels:
n: 表示中间有多少个Bottleneck对象
shortcut:
expansion:
depthwise:
act:
"""
super().__init__()
hidden_channels = int(out_channels * expansion) # hidden channels
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
self.conv2 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
self.conv3 = BaseConv(2 * hidden_channels, out_channels, 1, stride=1, act=act)
module_list = [Bottleneck(hidden_channels, hidden_channels, shortcut, 1.0, depthwise, act=act) for _ in
range(n)]
self.m = nn.Sequential(*module_list)
def forward(self, x):
x_1 = self.conv1(x)
x_2 = self.conv2(x)
x_1 = self.m(x_1)
x = torch.cat((x_1, x_2), dim=1)
return self.conv3(x)
接下来还要建一个SPP模块,它在Backbone中只使用一次:
class SPPBottleneck(nn.Module):
"""SPP模块,只使用一次"""
def __init__(self, in_channels, out_channels, kernel_sizes=(5, 9, 13), activation="silu"):
"""
Args:
in_channels:
out_channels:
kernel_sizes: SPP三个池化窗口的宽度
activation:
"""
super().__init__()
hidden_channels = in_channels // 2
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=activation)
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=ks, stride=1, padding=ks // 2) for ks in kernel_sizes])
conv2_channels = hidden_channels * (len(kernel_sizes) + 1)
self.conv2 = BaseConv(conv2_channels, out_channels, 1, stride=1, act=activation)
def forward(self, x):
x = self.conv1(x)
x = torch.cat([x] + [m(x) for m in self.m], dim=1)
x = self.conv2(x)
return x
现在我们可以构建Backbone了,就是把上面的模块串起来:
class CSPDarknet(nn.Module):
"""将以上部分组合起来"""
def __init__(self, dep_mul, wid_mul, out_features=("dark3", "dark4", "dark5"), depthwise=False, act="silu", ):
"""
Args:
dep_mul:模型的深度因子,因为YOLOX有好几个版本,它们的区别在于深度和宽度不同
wid_mul:模型的宽度因子
out_features:输出到Neck部分的特征
depthwise:是否使用更深的网络进行下采样(若使用更深的网络,则是DWConv,否则BaseConv)
act:激活函数
"""
super().__init__()
assert out_features, "please provide output features of Darknet"
self.out_features = out_features
Conv = DWConv if depthwise else BaseConv
base_channels = int(wid_mul * 64) # 64
base_depth = max(round(dep_mul * 3), 1) # 3
# stem
self.stem = Focus(3, base_channels, ksize=3, act=act)
# dark2
self.dark2 = nn.Sequential(
Conv(base_channels, base_channels * 2, 3, 2, act=act),
CSPLayer(base_channels * 2, base_channels * 2, n=base_depth, depthwise=depthwise, act=act),
)
# dark3
self.dark3 = nn.Sequential(
Conv(base_channels * 2, base_channels * 4, 3, 2, act=act),
CSPLayer(base_channels * 4, base_channels * 4, n=base_depth * 3, depthwise=depthwise, act=act),
)
# dark4
self.dark4 = nn.Sequential(
Conv(base_channels * 4, base_channels * 8, 3, 2, act=act),
CSPLayer(base_channels * 8, base_channels * 8, n=base_depth * 3, depthwise=depthwise, act=act),
)
# dark5
self.dark5 = nn.Sequential(
Conv(base_channels * 8, base_channels * 16, 3, 2, act=act),
SPPBottleneck(base_channels * 16, base_channels * 16, activation=act),
CSPLayer(base_channels * 16, base_channels * 16, n=base_depth, shortcut=False, depthwise=depthwise,
act=act),
)
def forward(self, x):
"""返回一个字典,该字典的键为要输出的特征层名称,值为对应的特征层张量"""
outputs = {}
x = self.stem(x) # Focus层的输出
outputs["stem"] = x
x = self.dark2(x)
outputs["dark2"] = x
x = self.dark3(x)
outputs["dark3"] = x
x = self.dark4(x)
outputs["dark4"] = x
x = self.dark5(x)
outputs["dark5"] = x
return {k: v for k, v in outputs.items() if k in self.out_features}
最后,我们来写一个测试脚本:
if __name__ == '__main__':
backbone = CSPDarknet(1, 1, depthwise=True)
input_data = torch.rand(8, 3, 640, 640)
output = backbone(input_data)
for k, v in output.items():
print(k)
print(v.shape)
输出
dark3
torch.Size([8, 256, 80, 80])
dark4
torch.Size([8, 512, 40, 40])
dark5
torch.Size([8, 1024, 20, 20])
至此,backbone部分构建完毕
3 Neck
在yolox_from_scratch下新建一个名为yolo.py的文件
先把要使用的包写进去
import torch
import torch.nn as nn
from .darknet import BaseConv, CSPDarknet, CSPLayer, DWConv
接下来写一个名为YOLOPAFPN的类,它包括Backbone和Neck,Backbone上一节已经介绍完了,这里只需要新建一个Backbone对象作为YOLOPAFPN的成员变量就行。初始化函数中的主要内容,是新建Neck的各个部分的组件,初始化函数如下:
class YOLOPAFPN(nn.Module):
def __init__(self, depth=1.0, width=1.0, in_features=("dark3", "dark4", "dark5"), in_channels=[256, 512, 1024],
depthwise=False, act="silu"):
"""
Args:
depth:模型的深度因子,因为YOLOX有好几个版本,它们的区别在于深度和宽度不同
width:模型的宽度因子
in_features:Backbone的输出特征层名称构成的元组,相对于Neck部分来说则是输入的特征层
in_channels: dark3,dark4,dark5三个特征层的输出通道构成的列表,相对于Neck部分来说则是输入通道
depthwise:是否使用更深的网络进行下采样(若使用更深的网络,则是DWConv,否则BaseConv)
act:激活函数
"""
super().__init__()
self.in_features = in_features # 输入到neck部分的各个特征层名字组成的元组
self.in_channels = in_channels # 输入到neck部分的各个特征层通道组成的列表
self.backbone = CSPDarknet(depth, width, depthwise=depthwise, act=act) # 主干网络
self.upsample = nn.Upsample(scale_factor=2, mode="nearest") # 上采样层
Conv = DWConv if depthwise else BaseConv
self.lateral_conv0 = BaseConv(int(in_channels[2] * width), int(in_channels[1] * width), 1, 1, act=act)
self.C3_p4 = CSPLayer(
int(2 * in_channels[1] * width),
int(in_channels[1] * width),
round(3 * depth),
False,
depthwise=depthwise,
act=act,
)
self.reduce_conv1 = BaseConv(int(in_channels[1] * width), int(in_channels[0] * width), 1, 1, act=act)
self.C3_p3 = CSPLayer(
int(2 * in_channels[0] * width),
int(in_channels[0] * width),
round(3 * depth),
False,
depthwise=depthwise,
act=act,
)
# bottom-up conv
self.bu_conv2 = Conv(int(in_channels[0] * width), int(in_channels[0] * width), 3, 2, act=act)
self.C3_n3 = CSPLayer(
int(2 * in_channels[0] * width),
int(in_channels[1] * width),
round(3 * depth),
False,
depthwise=depthwise,
act=act,
)
# bottom-up conv
self.bu_conv1 = Conv(int(in_channels[1] * width), int(in_channels[1] * width), 3, 2, act=act)
self.C3_n4 = CSPLayer(
int(2 * in_channels[1] * width),
int(in_channels[2] * width),
round(3 * depth),
False,
depthwise=depthwise,
act=act,
)
接下来是forward方法,它主要是把各个组件串起来:
def forward(self, input):
"""
输出一个元组,这个元组包含三个张量,分别送给三个检测头
"""
out_features = self.backbone.forward(input) # 获得Backbone部分的输出
features = [out_features[f] for f in self.in_features] # 各个特征层张量构成的列表
[x2, x1, x0] = features
fpn_out0 = self.lateral_conv0(x0) # 1024->512/32
f_out0 = self.upsample(fpn_out0) # 512/16
f_out0 = torch.cat([f_out0, x1], 1) # 512->1024/16
f_out0 = self.C3_p4(f_out0) # 1024->512/16
fpn_out1 = self.reduce_conv1(f_out0) # 512->256/16
f_out1 = self.upsample(fpn_out1) # 256/8
f_out1 = torch.cat([f_out1, x2], 1) # 256->512/8
pan_out2 = self.C3_p3(f_out1) # 512->256/8
p_out1 = self.bu_conv2(pan_out2) # 256->256/16
p_out1 = torch.cat([p_out1, fpn_out1], 1) # 256->512/16
pan_out1 = self.C3_n3(p_out1) # 512->512/16
p_out0 = self.bu_conv1(pan_out1) # 512->512/32
p_out0 = torch.cat([p_out0, fpn_out0], 1) # 512->1024/32
pan_out0 = self.C3_n4(p_out0) # 1024->1024/32
outputs = (pan_out2, pan_out1, pan_out0)
return outputs
4 Head
在yolox_from_scratch\nets\yolo.py中新建一个名为YOLOXHead的类,它需要实现下面的结构:

数据进入检测头之后,先进入卷积模块(图中的方框1),输出再分两个分支,一个是分类分支(方框2和方框3),另一个是回归分支(方框4),其中回归分支又可以分成2个分支,一个是预测目标框的中心点坐标(方框5),另一个是预测置信度(方框6)。
其初始化方法如下:
class YOLOXHead(nn.Module):
def __init__(self, num_classes, width=1.0, strides=[8, 16, 32], in_channels=[256, 512, 1024], act="silu",
depthwise=False, ):
"""
Args:
num_classes:类数
width:模型的宽度因子
strides:Neck输出的特征层中
in_channels:Neck中每条分支的输出通道,相对于Head而言是输入通道
act:激活函数
depthwise:是否使用更深的网络进行下采样(若使用更深的网络,则是DWConv,否则BaseConv)
"""
super().__init__()
self.n_anchors = 1
self.num_classes = num_classes
self.stems = nn.ModuleList() # 每个yolo头最开始部分的卷积模块,图中方框1
# 这个卷积模块之后有两个分支,第一个分支是目标分类,第二个分支是目标框回归
# 分类分支
self.cls_convs = nn.ModuleList() # 卷积,图中方框2
self.cls_preds = nn.ModuleList() # 预测,图中方框3
# 回归分支
self.reg_convs = nn.ModuleList() # 卷积,图中方框4
self.reg_preds = nn.ModuleList() # 目标框中心点和高宽预测,图中方框5
self.obj_preds = nn.ModuleList() # 目标置信度预测,图中方框6
Conv = DWConv if depthwise else BaseConv
for i in range(len(in_channels)):
"""检测头最前面的卷积模块"""
self.stems.append(
BaseConv(in_channels=int(in_channels[i] * width), out_channels=int(256 * width), ksize=1, stride=1,
act=act))
"""分类分支"""
self.cls_convs.append(nn.Sequential(*[
Conv(in_channels=int(256 * width), out_channels=int(256 * width), ksize=3, stride=1, act=act),
Conv(in_channels=int(256 * width), out_channels=int(256 * width), ksize=3, stride=1, act=act),
]))
self.cls_preds.append(
nn.Conv2d(in_channels=int(256 * width), out_channels=self.n_anchors * self.num_classes, kernel_size=1,
stride=1, padding=0)
)
"""回归分支"""
self.reg_convs.append(nn.Sequential(*[
Conv(in_channels=int(256 * width), out_channels=int(256 * width), ksize=3, stride=1, act=act),
Conv(in_channels=int(256 * width), out_channels=int(256 * width), ksize=3, stride=1, act=act)
]))
# 目标框中心点和高宽预测
self.reg_preds.append(
nn.Conv2d(in_channels=int(256 * width), out_channels=4, kernel_size=1, stride=1, padding=0)
)
# 目标置信度预测
self.obj_preds.append(
nn.Conv2d(in_channels=int(256 * width), out_channels=self.n_anchors * 1, kernel_size=1, stride=1,
padding=0)
)
它的forward方法如下:
def forward(self, inputs):
"""返回一个列表,里面的元素为每个检测头的输出张量"""
outputs = []
for k, x in enumerate(inputs):
x = self.stems[k](x)
cls_feat = self.cls_convs[k](x)
cls_output = self.cls_preds[k](cls_feat)
reg_feat = self.reg_convs[k](x)
reg_output = self.reg_preds[k](reg_feat)
obj_output = self.obj_preds[k](reg_feat)
output = torch.cat([reg_output, obj_output, cls_output], 1)
outputs.append(output)
return outputs
5 YOLOBody
好的,现在有Backbone、Neck和Head了,我们可以将它们串起来,组件整个YOLOBody了,其代码如下:
class YoloBody(nn.Module):
def __init__(self, num_classes, phi):
"""
Args:
num_classes: 数据集有多少个类别
phi: yolox的子模型编号,比如yolox_s,那么phi='s'
"""
super().__init__()
depth_dict = {'s': 0.33, 'm': 0.67, 'l': 1.00, 'x': 1.33, } # yolox四种标准模型的深度
width_dict = {'s': 0.50, 'm': 0.75, 'l': 1.00, 'x': 1.25, } # yolox四种标准模型的宽度
depth, width = depth_dict[phi], width_dict[phi] # 获得所使用模型的深度和宽度
self.backbone = YOLOPAFPN(depth, width) # 根据深度和宽度获得Backbone
self.head = YOLOXHead(num_classes, width) # 获得yolox的检测头
def forward(self, x):
fpn_outs = self.backbone.forward(x)
outputs = self.head.forward(fpn_outs)
return outputs
写一个测试代码,看看其能否正常输出:
if __name__ == '__main__':
backbone_and_neck = YOLOPAFPN(1, 1)
model = YoloBody(20, 's')
# 利用模拟数据查看能否正常输出
input_data = torch.rand(8, 3, 640, 640)
outputs = model(input_data)
for output in outputs:
print(output.shape)
输出:
torch.Size([8, 25, 80, 80])
torch.Size([8, 25, 40, 40])
torch.Size([8, 25, 20, 20])
正是我们想要的输出!
至此,网络结构搭建完毕。
6 权重导入
这里我们以yolox_s为例,介绍一下模型文件的导入。我们使用的数据集只有4个类别,因此这里就不使用官方预训练模型了,而是使用本项目的预训练模型来做预测。
(1)下载模型权重文件
下载yolox原作者在GitHub上发布的在COCO数据集上的预训练模型,Github页面为:https://github.com/Megvii-BaseDetection/YOLOX
我们这里为了演示,只下载最小的标准模型

如果打不开GitHub,可以将这个链接地址复制到迅雷,用迅雷下载:https://github.com/Megvii-BaseDetection/YOLOX/releases/download/0.1.1rc0/yolox_s.pth
下载好模型后,先把模型文件yolox_s.pth复制到yolox_from_scratch/model_data目录下
(2)解析模型
我们不知道模型的结构,直接导入不太合适,这里我们新建一个jupyter notebook,来解析模型,看看里面有什么(需要说明的是,本篇博客通过截图的方式给出的代码,都是实验性质的,类似于用的梯子,翻过去了就可以扔了,所以不需要复制):
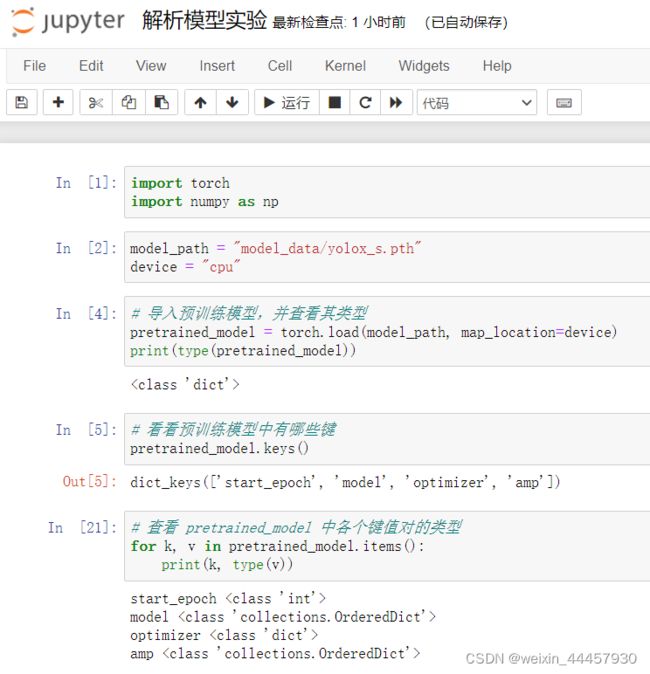
其中三个是字典,导入模型,暂时用不着优化器,所以我们就看看model和amp对应的值
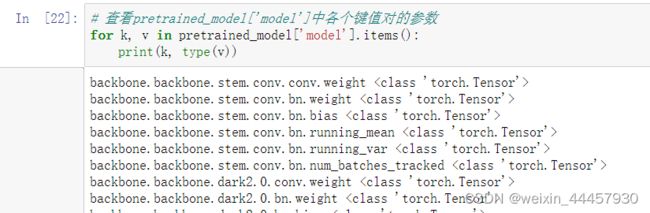
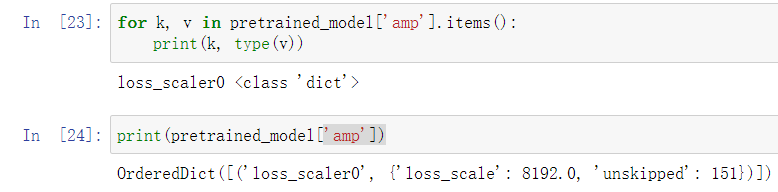
amp是啥,我现在也不太清楚,但是有model就足够了,它包含了我们之前定义的模型组件的参数。
(3)导入模型
好的,我们现在可以根据刚刚解析的结果,新建一个模型对象,并导入权重了。
在刚刚建立的jupyter notebook中,增加下面的代码:

然后写一个测试代码:
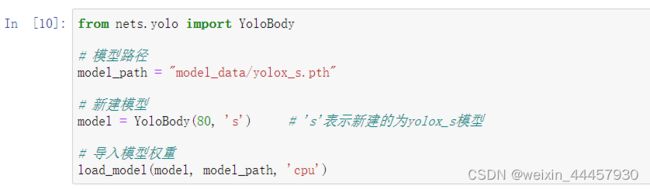
测试代码没有输出,说明预训练模型中的所有组件,在当前模型(自己创建的模型)中都存在。
我们也可以在建立模型的时候,修改一下要检测的类别数目,看看能不能检测出来:

OK,如果要用我们自己的数据集,那么模型的结构仅仅在最后的检测头上有所不同。
当然,我们自己建立的模型和官方预训练模型,还不能说是完全相同,因为还有一种情况没有考虑到,即可能自己建立的模型中的某些模块,在预训练模型中并没有出现。为此,我们再写一个导入模型的函数:

下面的测试代码,注意,此时导入模型的函数名为 load_model2
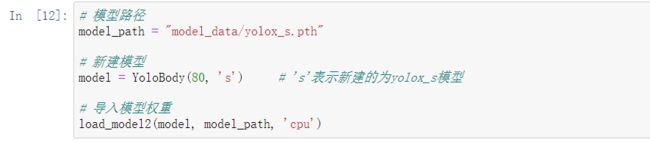
上述的测试代码也没有输出,说明我们自己建立的模型和官方预训练模型,在结构上是完全相同的。
在yolox_from_scratch/utils/utils.py中,加入下面的函数,作为模型的导入函数:
def load_model(model, pretrain_path, device='cpu'):
"""
导入模型的函数,用于迁移学习
Args:
model: 建立的模型
pretrain_path: 预训练模型的路径
device: 使用的设备
Returns:
"""
import torch
model_dict = model.state_dict() # 获得当前模型的状态字典
pretrained_dict = torch.load(pretrain_path, map_location=device) # 导入预训练模型
# 获得一个字典,其中'model'对应的值即为权重
weight_dict = {} # 使用字典存储当前模型的权重
for k, v in pretrained_dict['model'].items(): # k是预训练模型中的模块名
if k in model_dict and np.shape(model_dict[k]) == np.shape(v):
# 如果预训练模型中的模块名存在于当前模型的状态字典中,而且参数形状能正确匹配
weight_dict[k] = v
else:
print(k) # 如果预训练模型中的模块,在当前模型中没找到,或者无法匹配,那么就会打印相应的模块名
print(v.shape)
model_dict.update(weight_dict) # 更新当前模型的状态字典
model.load_state_dict(model_dict) # 将更新后的状态字典导入到当前模型
在yolox_from_scratch目录下新建一个名为load_test.py的文件

可以看到,目录结构中多了一个文件,这是刚刚建立jupyter notebook时自动生成的,不用管它。
在load_test.py中,将下面的代码加入进去:
import torch
from utils.utils import load_model
from nets.yolo import YoloBody
if __name__ == '__main__':
"""模型的导入"""
# 模型路径
model_path = "model_data/yolox_s.pth"
# 新建模型
model = YoloBody(80, 's') # 's'表示新建的为yolox_s模型
# 导入模型权重
load_model(model, model_path, 'cpu')
"""生成模拟数据"""
image_data = torch.rand(8, 3, 640, 640)
"""将图片(模拟数据)输入到模型中"""
outputs = model(image_data)
for output in outputs:
print(output.shape)
输出为:
torch.Size([8, 85, 80, 80])
torch.Size([8, 85, 40, 40])
torch.Size([8, 85, 20, 20])
说明预训练模型导入成功!