强化学习之policy-based方法A2C实现(PyTorch)
A2C:Advantage Actor Critic算法
policy gradient结合MC的思想就是REFORCEMENT算法,采用回合更新策略网络。如果对这个感兴趣的,可以看我的另一篇https://blog.csdn.net/MR_kdcon/article/details/111767945。
REFORCEMENT缺陷就是:
①:效率低,回合更新制。
②:直接用累计奖励做critic,其方差较大,收敛过程不稳定,可以通过对奖励做nomalization来缓解回合间相同状态的方差。
针对这两点,actor critic算法就诞生了,其用policy gradient结合TD的思想,采用步进更新策略网络。
一、Actor Critic算法
1.1、A2C算法简介
1.2、A2C算法伪代码
1.1、A2C算法简介
根据critic的不同,大致可将Actor critic分为A2C(Advantage actor critic)、A3C(Asynchronous advantage actor critic)、QAC(Q Advantage actor critic)三类。

如上图所示,在做policy gradient的时候,就算以衰减G为critic,其方差大问题还是存在,造成了收敛的不稳定性,因此我们需要将这个critic换成其期望的形式,即E(G),这样可以抑制方差大带来的不稳定。
看到E(G),首先想到的就是value-based方法中的Q值函数,没错这里我们就是用Q值来取代G,至于后面的b,即baseline我们可以用V值函数来替代。
这样的话,优势函数Advantage function就变成了Q-V,而V是Q的期望值,故Q-V也是有正负的,这也符合我们设计baseline的初衷。
但是这样也存在一个小问题,除了策略网络以外,你还需要设计2个网络:即Q网络和V网络,为了简化成一个网络,可以对Q做个变式:
回忆一下贝尔曼等式 ,这里可以进一步简化,根据期望公式,可转换成:
,这里可以进一步简化,根据期望公式,可转换成: ,虽然都说贝尔曼等式在有模型下才能用,但是上述这个等式在推导过程中可以约去转移概率P,故可以成立。
,虽然都说贝尔曼等式在有模型下才能用,但是上述这个等式在推导过程中可以约去转移概率P,故可以成立。
因此我们的优势函数就变成了 ,这样我们设计一个网络就可以了,关键就是我们竟然推导出了TD error的V函数形式,这就可以和我们的DQN结合在一起了。
,这样我们设计一个网络就可以了,关键就是我们竟然推导出了TD error的V函数形式,这就可以和我们的DQN结合在一起了。

整个Actor critic算法结构如下:

最后你会发现,其实就是用TD error代替了G,其实V也可以充当TD目标值。只不过我们当初选择Q是因为,一是Q能选择动作而V不能;第二是因为当初用V做的时候,经过预测和控制之后,V仍需要转成Q,有了贝尔曼公式就很方便,然后用贪心策略从Q中选出了动作,那么model-free没有贝尔曼公式中的转移概率P,故为了省去这一步,我们直接选择了Q。但是现在动作有policy网络输出,故我们可以不用Q了。其实Q和V从定义就可以看出没啥大差别,就相差了个动作而已,都表达了未来价值的期望值。

上图是网络结构图,和Dueling网络一样之后,由共享网络和子网络组成,子网络分别为策略网络和V估计网络

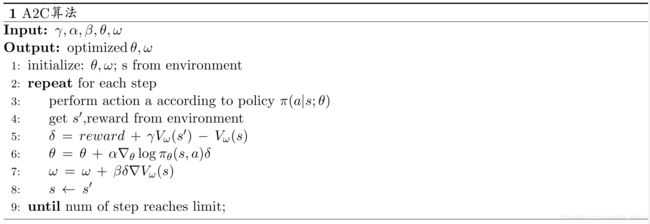
1.2、算法伪代码
A2C算法流程:
评估点基于TD误差,Critic使用nn来计算TD误差并更新网络参数,Actor使用nn利用PG的更新方式来更新参数。
上述AC算法已经是一个很好的框架,但实际应用还较远。
二、A2C算法实战
2.1、环境介绍
2.2、算法解析
2.3、实验结果
2.1、环境介绍:
Pendulum:连续动作的RL环境。

目的:让杆子保持直立。
有关Pendulum环境的细节:https://github.com/openai/gym/wiki/Pendulum-v0
①:状态空间:Box(3)

②:动作空间:Box(1),连续空间需要注意动作的2个区间值
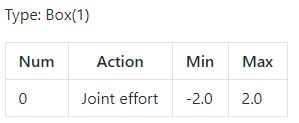
Note:输入给环境的动作必须是个1维的向量。比如np.array([0.1]),而不能是0维的np.array(0.1)。
③:奖励:
最小-(pi^2 + 0.1*8^2 + 0.001*2^2) = -16.2736044
最大0
可以通过除以最小来归一化,增加收敛的稳定性。
④:初始位置
随机在[-π,π]的角度,[-1,1]的速度中采样。
⑤:终止状态
满200步
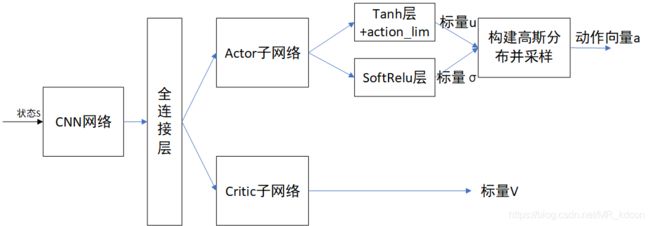
2.2、算法解析:

①:初始状态输入actor网络,网络的输出神经元为1个,分别产生一个均值u和标准差σ,用这两个值构建一个高斯分布,也就是说,高斯分布的均值和方差都由神经网络来近似。然后从中采样,将采样到的横坐标值通过裁减输出最后action。
②:action和环境交互,产生s_,r,将s、s_分别输入critic网络,网络的输出为V,故输出神经元也是1,产生V(s),V(s_)。计算TD误差,一路进行backward更新值函数网络。
③:另一路与action对应的概率密度f取对数后相乘,别忘记Pytorch是基于minimize的,只有梯度下降,故还要取负号,最后backward更新actor网络参数。
④:这样一个step就完成了,然后s=s_,循环①②③④,直到200个step到来,才算一个epsiode完成。
tips:这里将与环境交互得到的r除以其 值,用于归一化,由于奖励实时奖励r(s,a)的方差比较大,类似于取期望、nomalization,归一化也有利于收敛的稳定性,让参数更新的幅度不要太大。
值,用于归一化,由于奖励实时奖励r(s,a)的方差比较大,类似于取期望、nomalization,归一化也有利于收敛的稳定性,让参数更新的幅度不要太大。
Note:在A2C中,并没有Experience Reply,其更新是利用相邻数据做单样本的随机梯度下降实现的。
下图是实际的共享网络,当然你也可以将Actor和Critic完全分开来也行:
2.3、实验结果:
训练1000个episode,然后统计每个episode获得的reward


这张图是未经训练下pendulum的结果。奖励值在[-90,-180]之间。


上面两张图是A2C算法的结果:训练虽然没有收敛,但还是有效果的,在直立的时候,奖励在0附近,而上面的结果有出现些许的接近0的值。
下面是测试过程,显然A2C本身的问题将造成难以收敛:
三、展望与总结
从上面实验可以看出,A2C算法在连续动作的RL上确有效果,但是总的来说A2C很难收敛。因为Critic很难收敛,其一是因为nn的输入要求独立同分布,即输入无关性,不连续,但A2C中critic网络,我们每次都拿下个状态的TD目标值和当前状态的V做loss,然后去更新参数,这种强相关性会让nn学不到东西,可以通过引入经验回放池打破相关性。其二是critic中TD目标值和V估计值公用一个网络,这其实就是NIPS DQN所犯的错误,这会让两者难以靠近,可以通过引入Target网络解决。critic网络这么难收敛,那么actor网络就更难收敛了。
总结:actor-critic提供了很好的框架,并且其采样步进更新,效率比REFORCEMENT更高,采用优势函数做critic,方差更小,稳定性更强,但收敛问题还有待提高,需要在此框架上继续修改。
提升方向:DDPG、A3C